閉環控制在壓路機振動液壓系統中的應用
2014-10-13 07:38:12顧秋軍徐鵬杰劉占獻
山東交通學院學報 2014年2期
李 雨,顧秋軍,徐鵬杰,劉占獻
(長安大學道路施工技術與裝備教育部重點實驗室,陜西 西安 710064)
壓路機是公路施工中常見的一種非牽引式工程機械,作業質量是優先保證的性能參數[1]。對于振動壓路機而言,不同區段壓實度的均勻性是評價作業質量的指標之一[2],這要求壓路機在平穩工作時振動頻率保持穩定[3]。一般認為,壓路機在正常的壓實作業過程中振動頻率保持不變,但對某20 t單鋼輪壓路機試驗發現,振動頻率處于波動之中。
在“壓路機-土”振動系統中,參與振動的除振動輪外,還包括隨振動輪振動的一部分土。因此振動馬達承受的負載是壓路機振動輪與振動土共同作用的結果。壓路機振動輪的質量在振動壓實的過程中是不變的,但是振動土的質量與土的密度及內摩擦角等因素有關。由于振動壓實中土體參數是動態變化的,具有隨機性,因此振動土的質量也是隨機變化的。這造成壓路機振動負荷的波動。振動負荷的波動通過液壓系統傳遞到發動機,造成發動機轉速不穩定,最終影響振動頻率的穩定性[4-8]。
閉環控制是攤鋪機行走系統中常見的控制形式[9],能夠保證攤鋪機在外界負載變化時仍以較恒定的速度前進[10]。因此從理論上講,閉環控制是一種實現壓路機振動頻率穩定的較為理想的控制方式。為了驗證閉環控制振動土頻率穩定性的效果,采用試驗及仿真的方法進行研究。
1 壓路機振動液壓系統分析
圖1為典型的壓路機振動液壓系統原理圖。振動泵由發動機進行驅動,帶動振動馬達產生力矩和速度,驅動鋼輪產生振動。根據振動液壓系統流量的連續性[11],有

式中 np為振動泵輸出轉速,r/min;qp為振動泵排量,mL/r;ηpL為振動泵容積效率;nm為振動馬達轉速,r/min;qm為振動馬達排量,mL/r;ηmL為振動馬達容積效率。
由式(1)可得振動液壓系統的減速比i為
當振動馬達所受的振動扭矩變化量為ΔM時,作用在發動機動力輸出軸上的扭矩變化量ΔM1為

假設該過程中發動機始終處于調速段工作,且發動機調速段的扭矩—轉速特性曲線表達式為

圖1 單鋼輪壓路機振動液壓系統原理圖

式中 M1為發動機輸入扭矩,N·m;k為發動機調速段扭矩—轉速特性曲線斜率;b為該曲線在扭矩軸的截距。k、b取決于發動機本身的特性。
當發動機負載扭矩變化ΔM1時,引起的輸出轉速波動 Δnp為

聯立式(2)、(3)得

該轉速波動經振動液壓系統傳遞到振動馬達輸出軸上,造成的振動馬達輸出轉速波動量Δnm為

分析式(4)可知:1)減小負載扭矩的變化量,可以提高振動頻率的穩定性。但是負載扭矩的波動是由被壓實介質的不均勻特性決定的,無法進行人為控制。2)降低振動泵的排量,提高振動馬達的排量,可以在一定程度上抑制振動頻率的波動變化,但這樣改變了整個振動液壓系統的工作參數,不能獲得理想的效果。3)改善發動機的調速特性,選用剛度較大的發動機,可以改善振動頻率的不穩定現象,但會造成發動機功率的浪費。
當壓路機振動系統正常工作時,其振動泵、振動馬達的排量是不變的,此時振動馬達轉速的變化與負載扭矩變化成反比。當振動負載增大時,振動馬達轉速會降低,從而使振動頻率降低。若在振動負載增大的過程中,相應減小振動泵的排量,則在一定程度上會增大振動頻率的穩定性,這是閉環控制在振動液壓系統應用中的思路[12-13]。
2 振動液壓系統的閉環控制仿真
2.1 仿真模型的建立
為了研究壓路機振動工作過程中負載變化對振動頻率的影響,以某國產20 t單鋼輪振動壓路機作為試驗樣機,在室內土槽中進行低頻高幅模擬壓實試驗。試驗過程中利用數據采集儀對發動機轉速、振動系統壓力、振動馬達轉速等參數進行記錄,對試驗數據進行處理,得到壓實過程中振動負載隨時間的變化規律,如圖2、3所示。
由圖2可以看出,壓路機在實際壓實過程中,振動系統高壓腔壓力處于不斷變化之中,低壓腔壓力基本維持不變。在給定的時間段內高壓腔壓力波動約為8 MPa,這是由于外界負載的波動引起的。由圖3可以看出,由于振動系統壓力的波動變化,導致加載到發動機輸出軸上的外負載時刻處于變化之中,導致發動機轉速波動,該時間段內發動機轉速波動約為80 r/min。發動機轉速波動引起振動馬達轉速波動,波動轉速約為60 r/min,最終導致振動頻率存在1 Hz左右的波動。
為了分析外界負載波動對振動頻率的影響,運用AMESim軟件對壓路機振動系統進行建模。根據試驗樣機的基本參數,將變量泵的最大排量設定為45 mL/r,定量泵的排量設定為17 mL/r,定量馬達的排量設定為55 mL/r。
為了簡化模型,不考慮行走負載波動對發動機轉速的影響,同時將發動機外特性曲線簡化為線性模型,得到的模型如圖4所示。
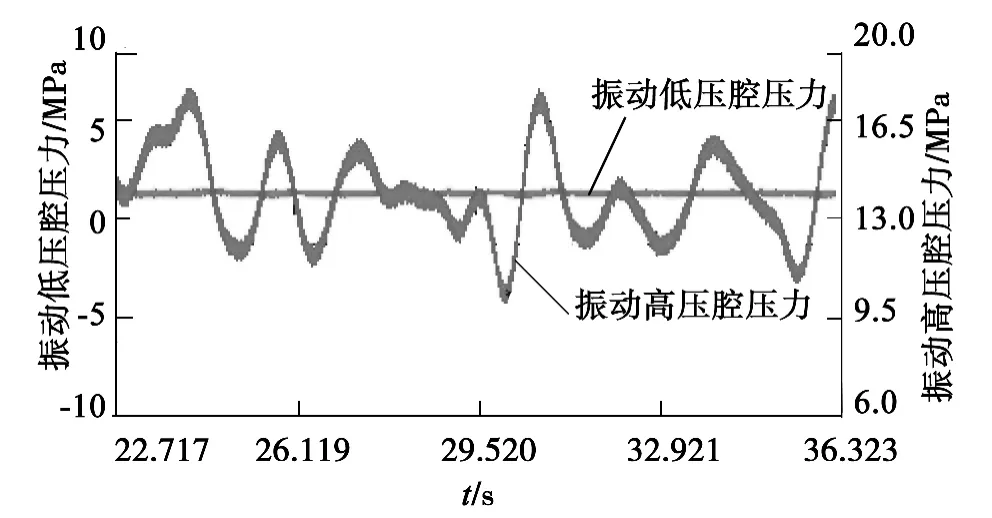
圖2 振動系統壓力變化
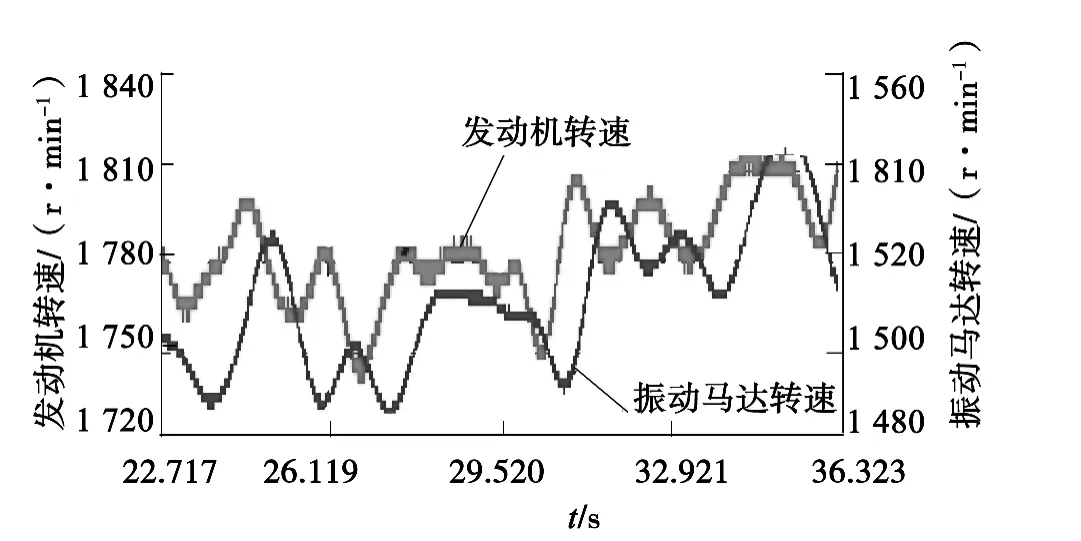
圖3 發動機及振動馬達轉速變化

圖4 振動液壓系統仿真圖
將試驗數據導入到AMESim模型中,得到各參數的變化規律如圖5所示。
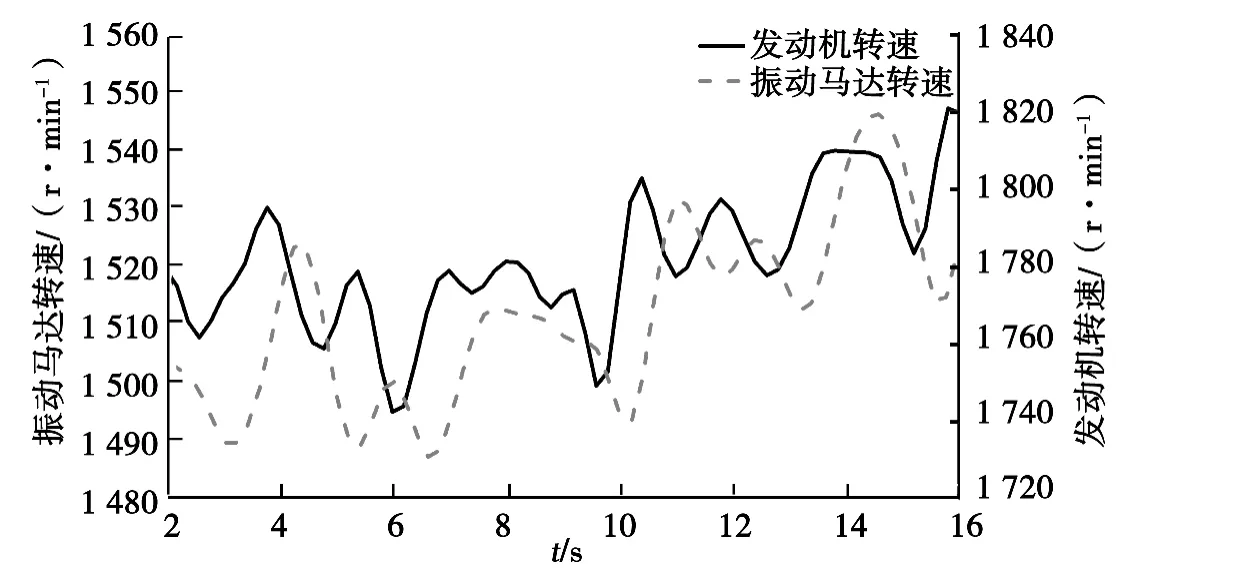
圖5 發動機、振動馬達轉速仿真結果
對比圖3、5可知,仿真結果與試驗結果一致,說明仿真模型基本正確。利用閉環反饋的控制思想對現有振動液壓系統模型進行改進。對比現有的液壓系統閉環控制的方法,最終采用PID控制這一經典的控制方法[14]。
PID控制器是一種線性控制器,根據給定值與實際輸出值構成控制偏差,將偏差的比例、微分、積分通過線性組合形成控制量,對被控對象進行控制[15]。對于試驗樣機的振動液壓系統,為了實現振動頻率的穩定性,需要檢測振動馬達輸出轉速,將被測轉速與目標轉速進行對比,并對差值信號進行PID運算,最終得到合理的電液伺服閥控制信號,控制振動泵排量發生改變,進而使被測轉速趨于目標轉速。系統方框圖如圖6所示。
通過添加PID模塊,調整模塊中各參數的取值,最終優化后的閉環控制振動液壓系統模型見圖7。
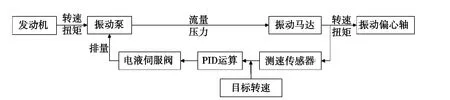
圖6 振動液壓系統PID控制方框圖

圖7 閉環控制振動液壓系統仿真模型
2.2 仿真分析
通過調整PID模塊中相應參數,當輸入相同的振動負載時,最終得到的發動機轉速特性曲線及振動馬達轉速變化曲線如圖8、9所示。
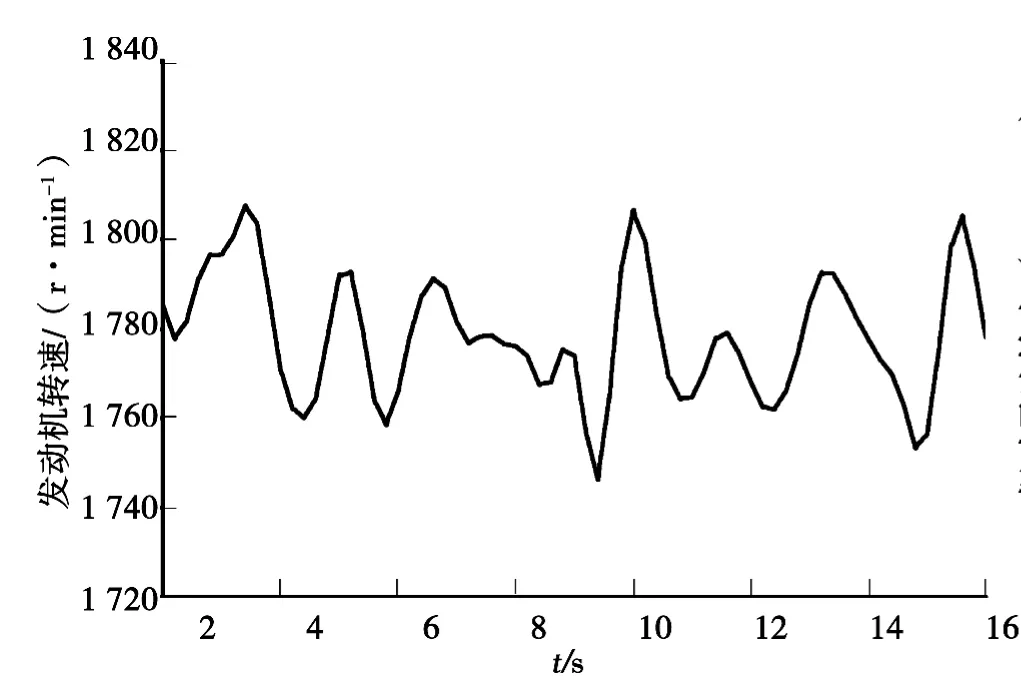
圖8 發動機轉速仿真特性曲線
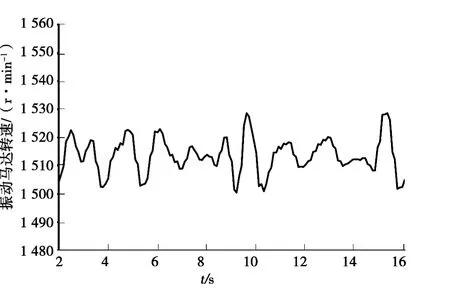
圖9 振動馬達轉速仿真特性曲線
由圖8可以看出,與改進前相比,加入閉環控制后,在相同的振動負載下,發動機轉速的波動略有降低。這是因為在閉環控制系統的作用下,振動泵的排量依照被測轉速的大小不斷波動變化,導致實際加載到發動機動力輸出軸上的負荷有所降低,因而發動機表現出來的速度波動減小。由圖9可以看出,利用閉環反饋,振動馬達的轉速波動由原來的60 r/min降低至30 r/min,振動頻率的穩定性有所提高,這一方面是由于發動機速度波動的降低引起的,另一方面也是由于振動泵排量的變化導致整個振動液壓系統的減速比處于動態變化之中,從而使振動馬達的轉速波動有所減少。
3 結語
振動頻率穩定性是保證壓路機工作質量的重要參數,降低外界負載的波動、改善振動液壓系統的工作參數、提高發動機速度剛度、采用閉環控制等可以提高振動頻率的穩定性,采用閉環控制是一種較好的解決辦法。通過對試驗樣機進行試驗,并利用AMESim軟件對振動液壓系統進行閉環改造,能夠在一定程度上提高壓路機振動頻率的穩定性。
[1]趙麗萍,李雨,沈建軍.雙鋼輪振動壓路機行走系統速度剛度研究[J].山東交通學院學報,2013,21(3):76-79.
[2]龔創先.振動壓路機壓實性能研究與優化[D].湘潭:湘潭大學,2013.
[3]張奕,龍水根.振動壓路機振動頻率恒定控制[J].中國工程機械學報,2003,1(1):72-76.
[4]寧鵬,張敏,魏文瀾.振動壓路機振幅的探討[J].山東交通學院學報,2012,20(4):75 -77.
[5]張青哲,楊人鳳,戴經梁.振動壓路機——土壤系統動力學模型及分析[J].建筑機械,2009(21):98-101.
[6]張泓,聞邦椿.振動壓路機壓實機理的研究[J].建筑機械,2000(03)25-27.
[7]曹婷,胡碧陽,張志峰,等.雙鋼輪振動壓路機動態負荷特性分析[J].山東交通學院學報,2012,20(3):72-76.
[8]李軍,李言,周志立.振動壓路機振動頻率控制系統研究[J].機械科學與技術,2012,31(4):669-673.
[9]拾方治.瀝青混凝土攤鋪機行駛系統PLC控制技術研究[D].西安:長安大學,2002.
[10]付辰琦.攤鋪機行走速度平穩性控制的研究[D].秦皇島:燕山大學,2012.
[11]王靜,秦文波,龔國芳,等.大流量高性能液壓系統的若干關鍵技術研究[J].浙江大學學報:工學版,2009,43(7):1264-1268.
[12]馬鵬宇,胡永彪,張忠海.功率控制對外負荷在發動機調速特性上配置的影響[J].筑路機械與施工機械化,2010(7):73-75.
[13]劉輝.履帶式攤鋪機行駛控制系統研究[D].成都:西南交通大學,2012.
[14]張奕,申曉龍,劉樺.智能壓路機振頻控制系統的模糊自適應PID控制[J].筑路機械與施工機械化,2006(8):48-50.
[15]王述彥,師宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機械科學與技術,2011,30(1):166-172.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車與新動力(2015年1期)2015-02-27 12:11:01
計算物理(2014年2期)2014-03-11 17:01:44