基于電磁驅動的爬行機器人設計
2014-10-21 20:06:36韓忠華
中國機械 2014年24期
韓忠華

摘要:介紹了一種基于電磁驅動結構的爬行機器人的研究與設計,系統的研究了其結構形式和驅動方式,詳細的討論了其行走原理。研究證明該爬行機器人具有結構簡單、易于控制、穩定性好等優點。
關鍵詞:電磁驅動;爬行機器人;運動分析
引言
爬行機器人是機器人領域重要的發展分支。近年來,國內外學者對尺蠖、蛇、蚯蚓等生物在復雜環境下有效運動機制展開了大量研究,根據其運動原理設計出尺蠖式、蛇形、蠕動式等多種類型仿生爬行機器人。除了傳統的剛性結構,自由度更高、適應性更強的軟體柔性結構也不斷被嘗試應用,并取得了良好的效果。
爬行機器人的驅動方式較多,如常規的電機驅動、記憶合金驅動(SMA)、氣動、電活性聚合物驅動和化學驅動等。借助以上驅動方式,仿生爬行機器人可以完成蜿蜒或伸縮等基本動作,實現本身的行走。
值得指出的是,對仿生類爬行機器人的研究緊密結合了其實際應用需求。如:針對狹小、粗糙、陡峭、崎嶇的復雜環境下(如災難廢墟內)探尋、搜救等應用,研發了穩定性好、橫截面小、自由度高的蛇形機器人[1];針對工業管道的監測、檢修等應用,研發了簡單緊湊、運行平穩、可靠性高的尺蠖式機器人[2];而在醫療領域,適合柔軟、彎曲環境下的運動蠕動式機器人得到了良好的應用與發展[3]。
本文針對狹小的平面使用環境,設計了一種基于電磁驅動的爬行機器人,結構簡單,控制簡便,橫截面積小,行走效率高,適合在縫隙中穿行。
1.結構組成與驅動原理
1.1結構組成
爬行機器人是一個具有應用價值的行走平臺,整體設計應滿足擴展功能和運動功能的需求,所以其總體設計應兼顧擴展應用接口和運動平臺[4]。
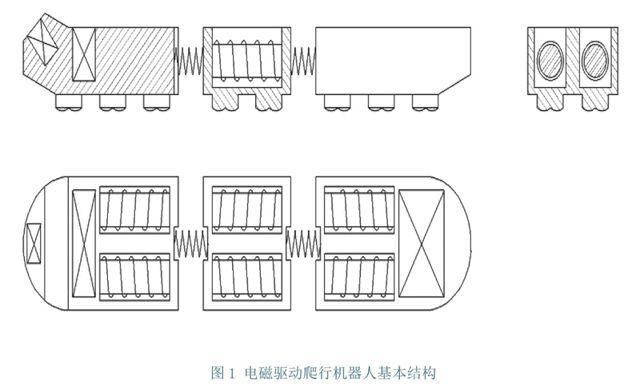
該爬行機器人由頭部、中間部和尾部三部分構成,典型結構如圖1所示。頭部、中間部和尾部三個單元內都并列安裝兩個電磁模塊,相互配合、協調動作進行驅動。頭部、尾部單元結構類似,分別位于機器人的兩端,其中頭部搭載應用模塊(如攝像頭)和控制電路,尾部搭載電池為機器人提供能源。中間部由一至多個可拆裝的驅動單元組成。每個單元都設計有與爬行表面接觸的足部,提供爬行所需的摩擦力。所有單元之間采用軟彈簧式柔性連接,可完成任意角度的轉彎動作。
1.2 驅動方式
爬行機器人常用的驅動方式有電機驅動、氣動、SMA驅動三種。電機驅動利用各種電機產生的力或轉矩,經過傳動機構直接驅動負載,獲得要求的機器人運動,運動精度高、響應快、易于控制,是應用最普遍的驅動方式[5],但也存在機械結構過于復雜、成本高、維護難度大等缺點;氣動方式則通過對機器人柔性腔體充放氣,致使其發生發雜的變形運動,具有反應速度快、功率密度高等優點,但需要外置高壓氣源,難以去除拖尾和實現小型化;SMA驅動是利用形狀記憶合金的特性,通過控制SMA彈簧上電流的通斷來實現伸縮變形,功率密度高、驅動力大,但其響應速度慢、效率低,并且易于老化[6]。
基于現有研究,本文提出一種基于電磁鐵磁力的驅動方式,其驅動器是機器人本體每個單元都并排安裝的、總體串聯分布的電磁模塊。電磁模塊采用常規的鐵芯漆包線結構,上電后周圍會產生有極性的磁場分布。將一組兩個電磁鐵串聯在一起,通過改變上電電流方向,可以使電磁模塊極性呈現NS-NS或NS-SN形式排列,相互間產生電磁引力或斥力來實現吸合或分離的動作,完成爬行所需的伸縮運動。
2.運動步態分析
將該爬行機器人的頭部、中間部和尾部三個單元分別編號為1、2、3,未上電時,由于三個單元質量及與地面接觸面積的差別,可設定此時三個單元與地面的最大靜摩擦力fmax1=fmax3>fmax2。各個單元之間的柔性彈簧僅起連接作用,在運動過程中產生的變形反彈力可設定為忽略不計。
2.1 直線行走
系統上電時,機器人三個單元吸合在一起,定義為初始狀態。直線行走時,可以將每個單元中并排的兩個電磁模塊極性同步變化。從圖2不難看出,其運動機理可分為以下三步:
(1)改變單元1電磁模塊電流方向使其磁極反向,此時單元1受單元2、3的電磁斥力F1,同時單元2、3受反向電磁斥力F23= F1。當fmax2+ fmax3> F1> fmax1時,單元1開始向前運動,單元2、3仍吸合在一起保持靜止。此步驟完成后,機器人實現狀態1;
(2)改變單元2電磁模塊電流方向使其磁極反向,此時單元2受單元1的電磁引力F2和單元3的電磁斥力F2”,即其所受合力F2= F2+ F2”;同時單元1受反向電磁引力F1= F2,單元3受反向電磁斥力F3= F2”。當F2> fmax2、F1< fmax1、F3< fmax3時,單元2開始向前運動與單元1吸合,單元1、3保持靜止。此步驟完成后,機器人實現狀態2;
(3)改變單元3電磁模塊電流方向使其磁極反向,此時單元3受單元1、2的電磁引力F3,同時單元1、2受反向電磁引力F12= F3。當fmax1+ fmax2> F3> fmax3時,單元3開始向前運動,單元1、2仍吸合在一起保持靜止。此步驟完成后,單元1、2、3吸合到一起實現狀態3,即回到初始狀態。此時,機器人完成一個運動周期,向前行走一個步距l。
2.2 轉彎運動
給兩列電磁鐵模塊分別編號為A、B,當每個單元的兩個電磁模塊電磁極性方向和大小分別按一定規律變化時,機器人可以完成轉彎運動。如圖3,設定讓電磁模塊產生前N后S極性的電流方向為正,則在右圖中電磁模塊電流的變化規律下,機器人可以分步驟對應實現左圖所示狀態,完成一個角度為θ轉彎的運動周期。
轉彎角度θ與單元運動時所受力和力矩的大小和方向相關,而作用力和力矩都是通過磁鐵模塊產生的磁場相互施加給對方的。實際上,根據場分布的特性,在本文討論的先并列后串聯的電磁模塊分布驅動方案中,只需一方的磁場分布不均勻即可產生偏離直線的運動。所以,除了圖3所示的電流變化規律外,電流方向不變、大小變化也可完成角度較小的轉彎運動。這就意味著如果在驅動端采用PWM方式控制輸入的電壓和電流,可以使機器人獲得較高精度的行走軌跡,大大提高了其操控性和實用性。
3.延伸研究
如何提高運動能力(包括速度、精度、靈活性)和對環境的適應能力,一直是爬行機器人研究的關注熱點,其關鍵技術包含機器人本體結構設計、驅動方式和控制算法三個方面。電磁驅動是一種結構極其簡單、操控方便、低價高效的驅動方式,易于小型微型化后驅動一些特種機器人。本文所提出的機器人結構僅是一種可行性驗證方案,如果經設計后搭載相應的結構平臺(如多節蛇形結構),也可驅動蜿蜒、3D等運動方式,完成越障、攀爬甚至跳躍等復雜動作,所以后續研究將圍繞其應用平臺的拓展而展開。
4.結論
提出了一種基于電磁驅動的爬行機器人設計方案,機械結構簡單,可實現小型化和微型化,適合在狹小縫隙中穿行使用。與常規的驅動方式比,電磁驅動具有結構簡單,控制簡便,成本低、效率高等特點,可廣泛應用于多種類型的爬行機器人平臺。
參考文獻:
[1]李斌.蛇形機器人的研究及在災難救援中的應用[J].機器人技術與應用,2003,(3):22-26.
[2]宋巖,陳小安,等.新型尺蠖式爬行機器人的設計及樣機研制[J]. 機械設計與制造. 2008,(1):179-181
[3]簡小剛,王葉鋒,等. 基于蚯蚓蠕動機理的仿生機器人研究進展[J].中國工程機械學報. 2012,10(3):359-363.
[4]李鑫勇,王彪,等. 電磁驅動結構的球形機器人研究[J]. 機械設計與制造. 2010,(5):169-70.
[5]宋巖.一種尺蠖式爬行機器人的研究[D].重慶:重慶大學,2007.
[6]曹玉君,尚建忠,等. 軟體機器人研究現狀綜述[J]. 機械工程學報, 2012,48(3):25-33.