高速滑行艇在規(guī)則波中的縱向運動數(shù)值研究
2014-10-25 05:53:40王碩蘇玉民龐永杰劉煥興
哈爾濱工程大學學報 2014年1期
王碩,蘇玉民,龐永杰,劉煥興
(哈爾濱工程大學水下智能機器人國防重點實驗室,黑龍江哈爾濱150001)
隨著海洋權益的爭奪和海洋濱海資源的開發(fā)日益被矚目,滑行艇因其良好的機動性能和高速性能得到廣泛的應用。不同于傳統(tǒng)的排水型船舶,滑行艇在高速航行時依靠水動升力抬升船體,并伴有砰擊、上浪和飛濺等現(xiàn)象發(fā)生。傳統(tǒng)的船舶原理和理論已不適用于滑行艇的性能估算。需要新的數(shù)值方法對其水動力性能進行準確的分析和計算。
關于滑行表面的水動力計算研究起源于20世紀40年代NACA在蘭利水池的拖曳實驗[1],基于這些實驗后續(xù)的許多相關研究才得以展開。其中應用最廣的是Savitsky于1964年提出的基于實驗數(shù)據(jù)的半經(jīng)驗公式計算方法[2]。1997 年 Zhao等[3]提出了一種基于勢流理論的二維半理論方法用于求解滑行艇水動升力問題。隨后Sun等[4-6]應用該方法對滑行艇水動力問題進行了深入研究,但始終基于細長體假設。董文才等對深V型滑行艇進行了規(guī)則波迎浪縱向運動實驗研究[7],并且分析了波浪因素對滑行艇縱向運動的影響;又根據(jù)一系列的試驗結果,提出了一種可預報滑行艇高速航行時的縱向運動的新方法,并且還通過模型實驗驗證了該方法的準確性[8]。近年來,應用RANS方程求解滑行表面水動力問題也已經(jīng)不僅僅停留在研究階段,CFD方法已經(jīng)成為許多快艇設計者的參考工具。Azcueta[9]應用商用軟件COMET對賽艇的水動力特性進行了計算,并應用于快艇的設計參考數(shù)據(jù)。蘇玉民等[10]應用FLUENT軟件對滑行艇在靜水和波浪中的運動規(guī)律進行研究,定性的給出了滑行艇在穩(wěn)定直航和迎浪航行中的運動規(guī)律。
滑行艇的耐波性能一直被認為是制約滑行艇發(fā)展的最主要問題之一。由于一般的滑行艇尺度相對波浪尺度較小,所以在波浪中的縱向運動是滑行艇耐波性研究中首要關注的重點。在高雷諾數(shù)下討論滑行艇在波浪中的運動性能無論對于數(shù)值計算還是模型試驗而言都是困難的。本文基于商業(yè)軟件STAR CCM+中的RANSE VOF求解器,對高速滑行艇在規(guī)則波中的迎浪縱向運動進行了數(shù)值研究。首先選取Katayama[11]的小尺度滑行艇模型試驗,對本文的數(shù)值方法計算精度進行了驗證;然后給出了滑行艇在縱浪中的3種運動形式(無跳躍、規(guī)則跳躍和不規(guī)則跳躍)的運動特征,并討論了波浪參數(shù)和航速對3種運動形式發(fā)生的影響。進而研究了跳躍的發(fā)生對滑行艇縱向運動函數(shù)的影響。
1 數(shù)值方法
1.1 控制方程
對于不可壓縮的粘性流動,在笛卡爾坐標系下,用張量的形式表示的時均連續(xù)性方程和RANS方程可以寫為
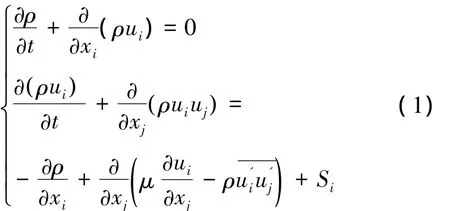
式中:i,j=1,2,3;ui為速度分量的時均值;為速度分量的脈動值為速度分量乘積的時間平均值;μ為流體的動力粘性系數(shù)。
數(shù)值模擬中采用隱式非定常形式,湍流模型為k-ωSST兩方程模型[12]。計算區(qū)域應設置足夠大以保證滑行艇周圍流場不受邊界影響。通常采用長方體計算域,船首到前方速度入口距離為1倍船長,舷側到計算域邊界距離為1.5倍船長,船尾流場長度為3倍船長。VOF(volume of fluid)法[13]是由 Hirt和Nichols在1981年提出來的,它是通過追蹤流體域來跟蹤自由面的,其基本原理是通過研究網(wǎng)格單元中流體和網(wǎng)格體積比函數(shù)F(0<F<1)來確定自由面,追蹤流體的變化。
1.2 計算網(wǎng)格
自適應直角切割網(wǎng)格技術是近十幾年來被廣泛應用的一種網(wǎng)格劃分技術,由于其生成簡單,且兼具結構化網(wǎng)格的較高網(wǎng)格質量和非結構網(wǎng)格的復雜表面適應性,得到了廣大CFD學者關注。切割網(wǎng)格技術起源很早,但由于其對邊界的處理需要占用大量計算機時間,一直未得以廣泛應用。直到1986年Keith Clarke等人利用直角切割網(wǎng)格技術和二維歐拉方程求解多段翼型,切割網(wǎng)格技術才重新發(fā)展起來。隨后十幾年間,切割網(wǎng)格技術得到比較快的發(fā)展。
切割網(wǎng)格生成的原理可簡單概括為先在整個計算域周圍空間生成體網(wǎng)格,體網(wǎng)格覆蓋計算域內外,包含邊界。然后用計算域邊界面切割初步生成的體網(wǎng)格,刪除計算域外的網(wǎng)格,進一步切割以提高計算域內網(wǎng)格質量。此種網(wǎng)格可以隨意控制計算域內的網(wǎng)格疏密程度,大大減少了不必要的計算位置的網(wǎng)格數(shù)量,且網(wǎng)格質量較高,缺點是難以變形適應動網(wǎng)格技術[14]。
STAR-CCM+提供的 DFBI(dynamic fluid body interaction)模塊是通過移動整個計算域來實現(xiàn)六自由度數(shù)值模擬的,計算中網(wǎng)格不需要變形,通過更新邊界條件來實現(xiàn)滑行艇的運動。因此可以采用切割網(wǎng)格來實現(xiàn)滑行艇的運動數(shù)值模擬。劃分網(wǎng)格時,需要對船體周圍進行加密,繪制4層邊界層網(wǎng)格,厚度設定為0.5 mm以滿足各個航速下的壁面函數(shù)的需求。船體表面網(wǎng)格及計算域體網(wǎng)格見圖1,為節(jié)省網(wǎng)格采用對稱邊界,對半船體進行計算[15]。

圖1 滑行艇切割表面和切割體網(wǎng)格Fig.1 The trimming surface mesh and volume mesh of the planing craft
圖2中給出了滑行艇表面邊界層網(wǎng)格和自由液面加密層網(wǎng)格的繪制情況。在STAR-CCM+中采用棱柱層網(wǎng)格模型繪制邊界層網(wǎng)格,可按規(guī)定網(wǎng)格層數(shù)和網(wǎng)格厚度繪制滑行艇表面網(wǎng)格。對于滑行艇在波浪中的運動數(shù)值模擬,波面周圍的網(wǎng)格需要加密,尤其沿垂直方向在波高范圍內需要10層以上網(wǎng)格,因此VOF模型才能準確捕捉到波面形狀。
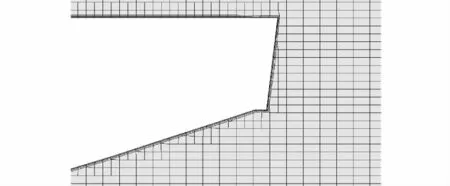
圖2 滑行艇表面棱柱型邊界層網(wǎng)格Fig.2 The prism layer m esh of the planing craft
1.3 運動模型
在建立滑行艇運動方程時,需采用2個坐標系,即滑行艇隨體坐標系(動系)和固連于大地的固定坐標系(定系)。隨體直角坐標系的原點位于滑行艇重心G處,坐標軸Gx、Gy、Gz分別經(jīng)過重心G的水線面、橫剖面和縱中剖面的交線。滑行艇的六自由度方程即為對于動系的質心運動定理和質心動量矩定理表達式為

式中:B為艇動量,Ω為角速度,F(xiàn)為外力合力,K為相對于質心的動量矩,V為航行速度,M為合力矩。
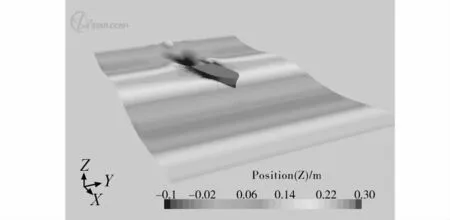
圖3 滑行艇在波浪中運動自由液面Fig.3 The free surface of the planing craft sailing in waves
DFBI模塊中內嵌的六自由度(6-DOF)求解器采用整個計算域隨艇運動的動網(wǎng)格處理方式。即整個計算域內的網(wǎng)格沒有變形和相對運動,而是將運動模型與流動求解器連接,整個計算域(包含船體表面和計算邊界)按照船體運動方程的計算結果運動,在每一時間步更新控制網(wǎng)格的空間位置和VOF值以及邊界條件函數(shù),以保證自由液面位置在整體坐標系中保持不變。為及時更新邊界,要求計算域來流方向和周邊均為速度入口,僅船后方向為壓力出口。每一時間步長根據(jù)船體的運動位移,并通過速度入口的兩相流分布來更新自由液面位置(VOF體積分數(shù)),來實現(xiàn)基于整體動網(wǎng)格的多自由度運動求解。圖3給出了滑行艇在波浪上運動的數(shù)值模擬情況,波形被VOF準確捕捉并表達。
1.4 數(shù)值方法驗證
為驗證本文數(shù)值方法對滑行艇在波浪中的運動計算準確性,選取了Katayma開展的滑行艇迎浪運動模型試驗進行驗證性計算。首先建立該滑行艇模型的數(shù)值模型,船模型線及數(shù)值模型如圖4。船模總長LOA=0.625 m,寬 B=0.25 m,型深 D=0.106 m,干舷d=0.059 m,船模重 W=4.28 kg,重心縱向位置LCG=0.285 m。實驗中,船模拖點位于重心處,加速拖曳到實驗要求速度,測量其在不同航速、不同波浪中的縱搖與升沉運動規(guī)律。
選取無跳躍與規(guī)則跳躍2個工況進行對比計算。
工況1:長度弗汝德數(shù)Fn=1.21,波高與干舷比Hw/d=0.68,波長與船長比λ/LOA=1.6,滑行艇未發(fā)生跳躍,有規(guī)律運動;
工況2:長度弗汝德數(shù)Fn=3.63,波高與干舷比Hw/d=0.51,波長與船長比λ/LOA=3.59,滑行艇發(fā)生規(guī)則跳躍。
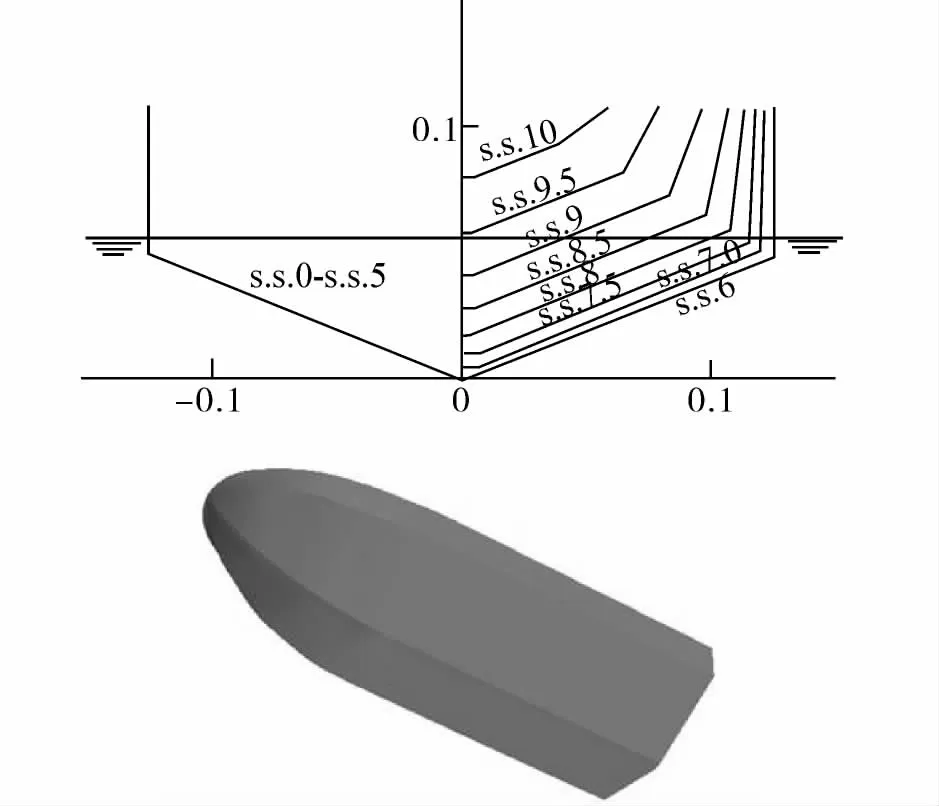
圖4 Katayama滑行艇模型型線圖和三維模型Fig.4 Katayama’s planning craftmodel lines and 3-D model

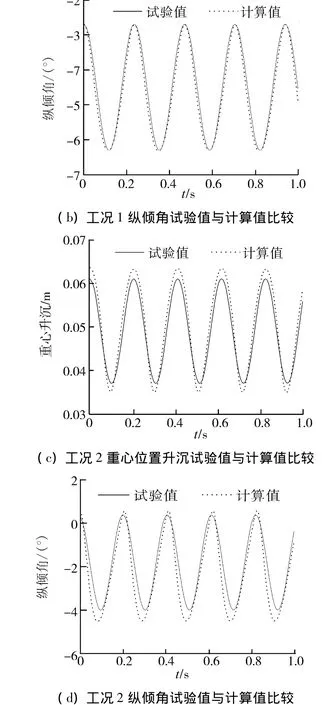
圖5 工況1、2中重心升沉曲線和縱傾角試驗值與計算值比較Fig.5 Comparison of experiment and numerical data of heavemotions and pitch angles in case 1 and case 2
圖5給出了2種工況下,縱搖和升沉的試驗值與計算值對比情況。計算曲線符合較好,其中低航速下的精度明顯高于高速時,但整體計算精度滿足工程應用。該部分驗證工作為本文前期工作,此處只給出簡單計算結果,對于更多詳情以及應用STAR-CCM+進行數(shù)值造波的驗證請參考文獻[16]。
2 計算結果分析
本文的計算對象,為自主設計的滑行艇模型,該艇型的型線及三維數(shù)值模型見圖6,模型主尺度見表1。
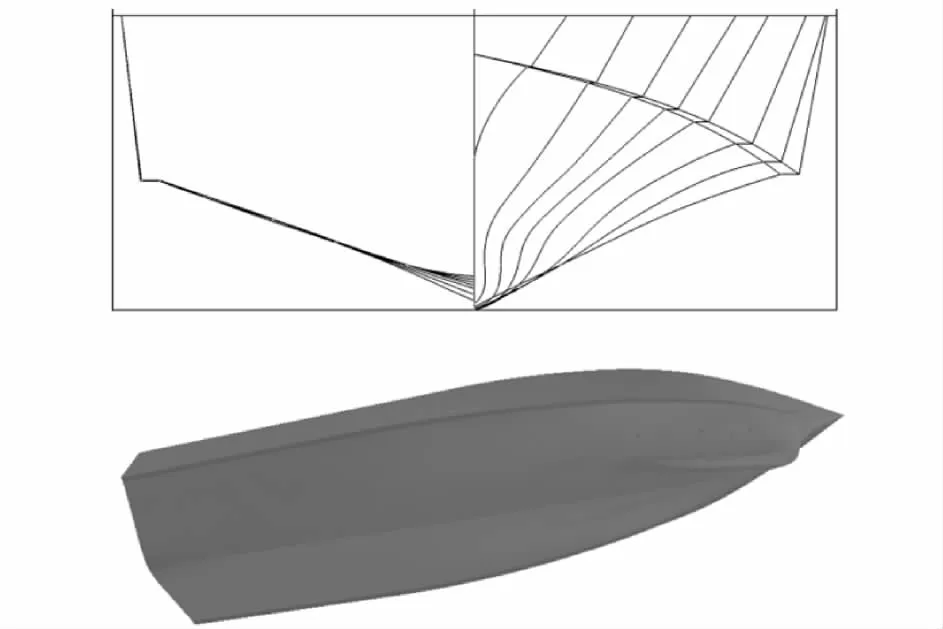
圖6 滑行艇模型型線及三維模型Fig.6 The body lines and 3Dmodel of the planing craftmodel
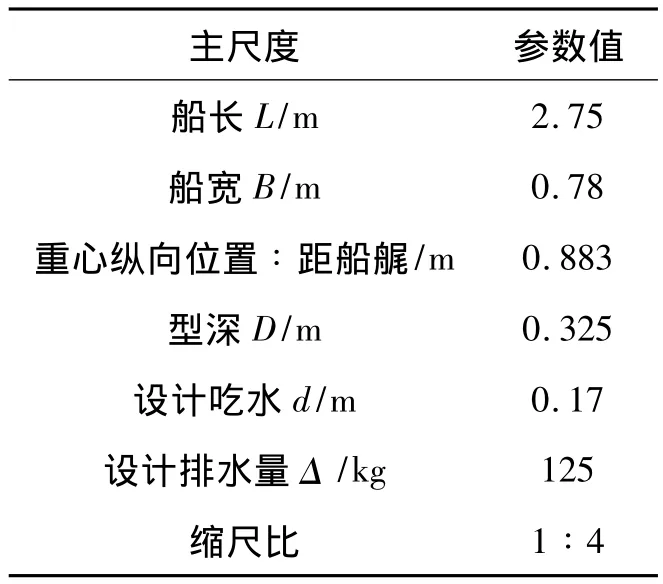
表1 船模主尺度Table 1 M ain dimensions of the ship model
2.1 滑行艇規(guī)則波中的3種運動情況
Katayama通過滑行艇耐波性模型試驗將觀察到的滑行艇迎浪運動分為3種情況:無跳躍運動、規(guī)則跳躍運動和不規(guī)則跳躍運動。本文通過數(shù)值方法進行模擬時,也成功觀察到了滑行艇規(guī)則波中的迎浪3種運動方式。計算發(fā)現(xiàn),這3種運動方式的運動規(guī)律不同,但其發(fā)生條件之間卻沒有明顯的界限,隨著條件改變,一種運動可以發(fā)展為另一種。例如,相同波浪參數(shù)下,隨著航速的增加,無跳躍運動可逐漸發(fā)展成規(guī)則跳躍,規(guī)則跳躍可逐漸發(fā)展為不規(guī)則跳躍。本節(jié)首先選取了某一航速下(滑行狀態(tài)Fn=1.93)3種運動形式發(fā)生的典型工況,對3種運動加以說明分析。
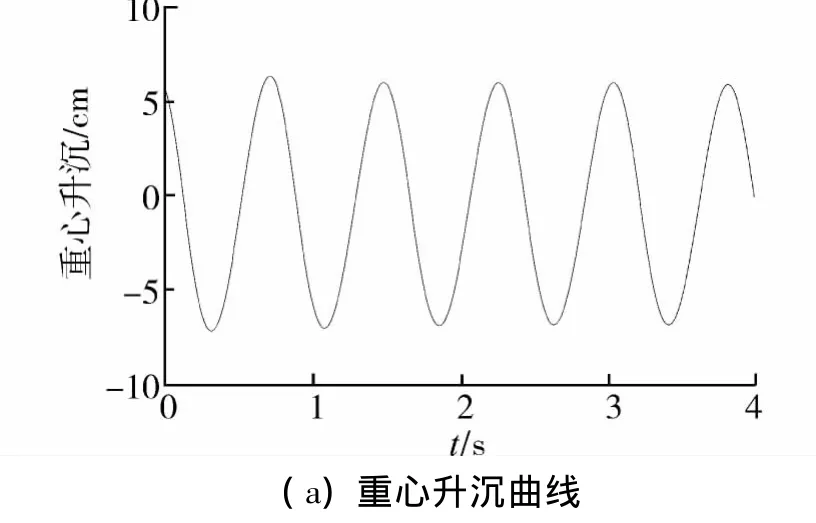
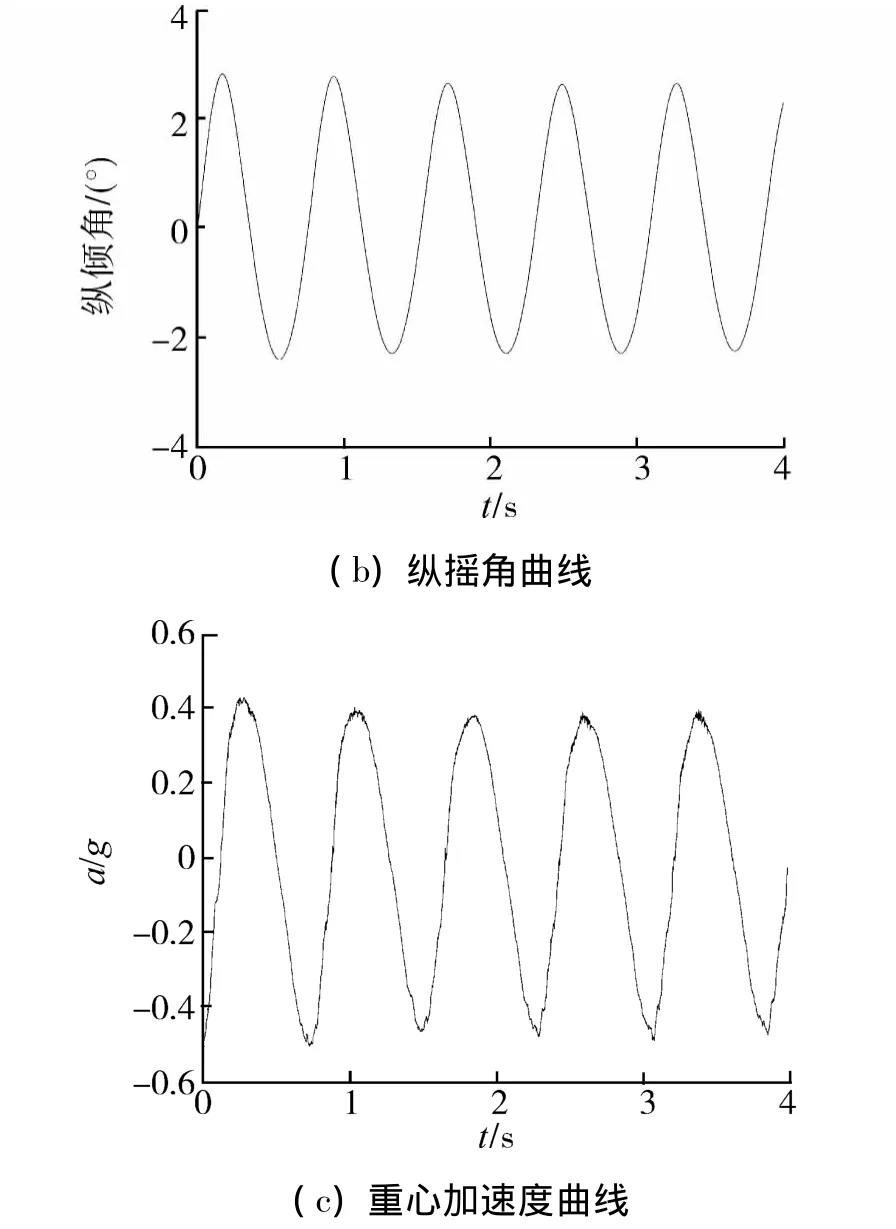
圖7 無跳躍運動時滑行艇運動參數(shù)曲線Fig.7 The curves of motion parameters in no jump condition
圖7給出了無跳躍運動下的滑行艇升沉、縱搖和重心處的垂向加速度(波長λ=4L,L為船長,波高h=L/40)。升沉和縱搖曲線均近似為正弦曲線,運動規(guī)律性明顯。重心處的垂向加速度曲線也近似正弦分布,加速度峰值約為0.4g。滑行艇在未發(fā)生跳躍時,運動曲線近似為正弦分布,與常規(guī)船型在波浪中的運動規(guī)律無明顯區(qū)別。
圖8給出了規(guī)則跳躍運動下的滑行艇運動曲線和重心處的垂向加速度(波長λ=4L,波高 h=L/20)。發(fā)生規(guī)則跳躍時,滑行艇在波浪上的運動仍然穩(wěn)定且呈周期性。升沉運動曲線仍近似正弦分布。而縱搖運動對比無跳躍運動時,在波峰與波谷間表現(xiàn)出不對稱性。本文定義的縱搖曲線以艏傾為正,艉傾為負。圖8中3條曲線的運動時間完全對應,可以結合3幅圖,分析滑行艇的運動。例如圖8(a)中升沉減小時,表明滑行艇在跳起后從最高點開始下落,此時對應圖8(b)中滑行艇處于埋艏的過程,而圖8(c)中加速度在經(jīng)歷短暫的自由下落-g狀態(tài)變?yōu)槭芘閾艏铀俣妊杆偕仙倪^程;當重心升沉增大時,船體被抬升向上跳躍,發(fā)生抬艏,縱搖角迅速減小,滑行艇逐漸脫離水面,加速度也由最大值逐漸減小為重力加速度。
由圖8(c)可以看出,當滑行艇發(fā)生規(guī)則跳躍時,加速度的峰值接近重力加速度g,表明滑行艇已接近完全越出水面,與水接觸面積很小。

圖8 規(guī)則跳躍運動時滑行艇運動參數(shù)曲線Fig.8 The curves of motion parameters in regular jum p condition
圖9給出了不規(guī)則跳躍運動下的滑行艇運動曲線和重心處的垂向加速度(波長λ=2L,波高h=L/20)。當發(fā)生不規(guī)則跳躍時,滑行艇的運動很不穩(wěn)定,雖然從運動曲線上看仍然有周期性,但幅值和頻率上均有明顯變化。在現(xiàn)實情況下,如果有其他方向上的擾動和干擾,不規(guī)則跳動會進而演變成更極端的運動甚至傾覆。不規(guī)則跳躍一般發(fā)生在波浪遭遇頻率較高的情況下,滑行艇經(jīng)過一個波峰后,在下落過程中遭遇第2個波峰,由圖9(c)可知,此時滑行艇受砰擊最嚴重,向上加速度達到4g以上,在真實海況下這是極度危險的,即使在無人滑行艇上,工作設備也無法在這么大的垂向加速度上維持正常運轉。在滑行艇實艇的設計和應用中,應避免不規(guī)則跳躍的發(fā)生。
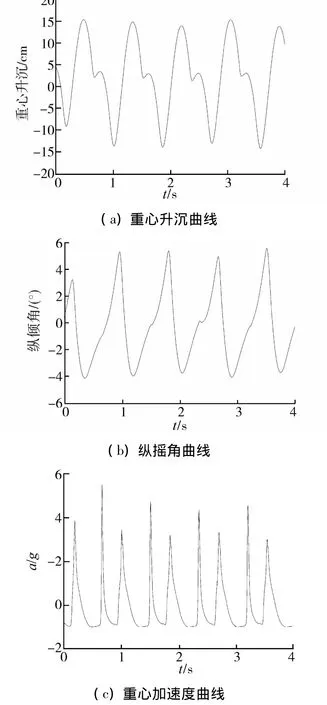
圖9 不規(guī)則跳躍運動時滑行艇運動參數(shù)曲線Fig.9 The curves of motion parameters in irregular jum p condition
2.2 跳躍發(fā)生條件
本文對波浪的數(shù)值模擬均基于一階規(guī)則波,波浪參數(shù)包含波長與波高,滑行艇則考慮航速。圖10給出了滑行艇在3個航速下、不同波高以及不同波長情況下的運動類型。
在較低航速時(Fn=0.96),跳躍發(fā)生的可能性較低。如圖10(a),在4個波長(2L,4L,6L和8L)和5個波高(L/10,L/15,L/20,L/30 和L/40)組成的20 個工況下,僅有3個工況發(fā)生規(guī)則跳躍,不規(guī)則跳躍沒有發(fā)生。在h=L/15時,僅在λ=6L時發(fā)生了跳躍;在h=L/10時,在λ=4L和λ=6L時發(fā)生了跳躍。這表明,在較大波高下跳躍容易發(fā)生,但跳躍的發(fā)生需要一定范圍的波長,波長過短運動不能夠充分發(fā)展而過長則波陡(h/λ)而跳躍也不會發(fā)生。
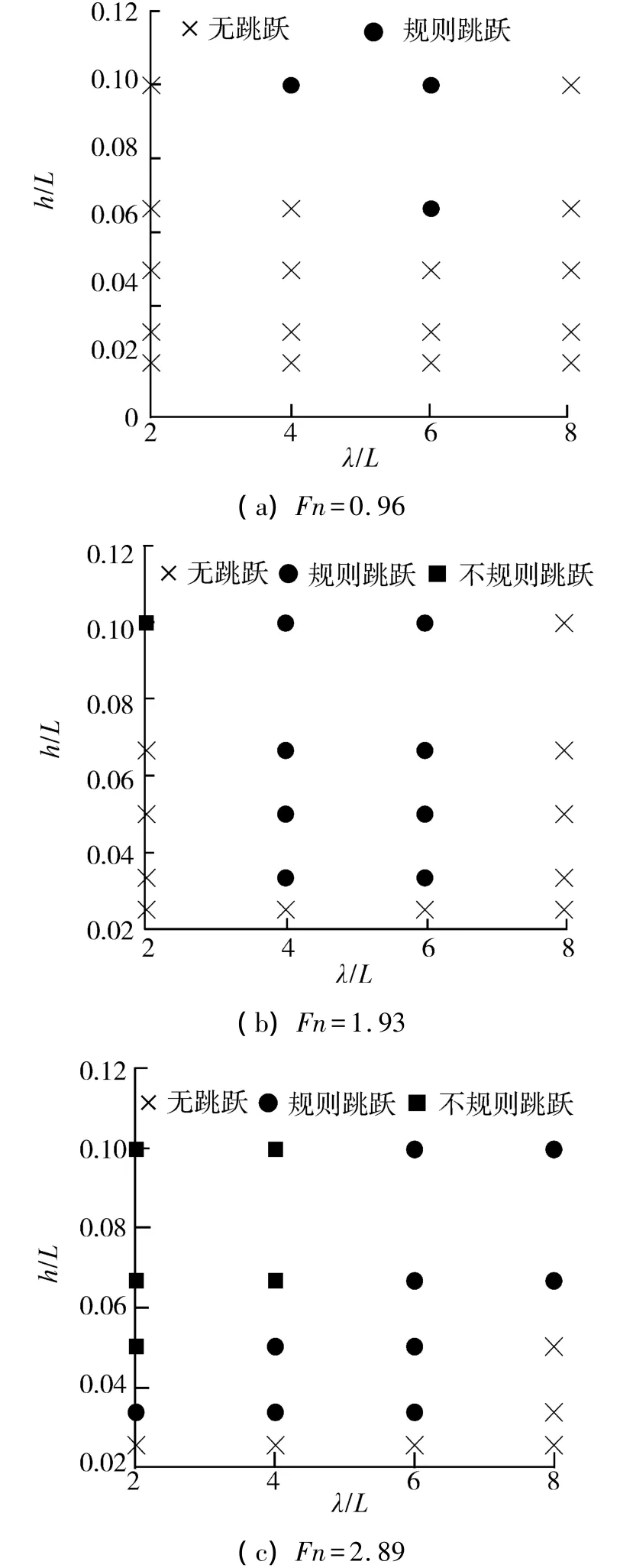
圖10 不同航速下跳躍發(fā)生條件分布Fig.10 The distribution of jump at different forward speeds
當航速提高時(Fn=1.93),如圖10(b),跳躍在更小的波高下便發(fā)生了。當λ=4L和λ=6L時,h=L/10、L/15、L/20和 L/30均發(fā)生規(guī)則跳躍,這表明伴隨著速度增大,引起跳躍的波高界限大大降低了,高速下滑行艇更容易產(chǎn)生跳躍,但波長仍需要在一定范圍內才會產(chǎn)生跳躍。值得注意的是,在λ=2且h=L/10時,發(fā)生了不規(guī)則跳躍。較大波高和較短波長的情況下發(fā)生的不規(guī)則跳躍表明,不規(guī)則跳躍可能是伴隨著較大的波陡發(fā)生的。
隨著航速進一步加大(Fn=2.89,圖10(c)),跳躍運動在分布范圍內大面積發(fā)生。只有在極小波高和在小波高大波長范圍內沒有跳躍發(fā)生。此時不規(guī)則跳躍的發(fā)生條件出現(xiàn)了較為明顯的規(guī)律。在發(fā)生跳躍的范圍內,不規(guī)則跳躍集中出現(xiàn)在波陡較大的區(qū)域。經(jīng)統(tǒng)計可知,當波陡h/λ>1/60時,均發(fā)生了不規(guī)則跳躍;在2個h/λ=1/60的工況中,有一個發(fā)生不規(guī)則跳躍;當h/λ<1/60時,均未發(fā)生不規(guī)則跳躍。
綜合對比圖10中3個航速下的跳躍發(fā)生條件可知,高航速和較大的波高是跳躍發(fā)生的最基本條件,與此同時波長也需要在一定范圍內,如果波長過長或過短,跳躍也不容易發(fā)生。在跳躍發(fā)生區(qū)間中,不規(guī)則跳躍的發(fā)生主要分布在較大的波陡范圍內,即當滑行艇以一定航速遭遇到高且短的規(guī)則波時,就可能誘發(fā)不規(guī)則跳躍的發(fā)生。
2.3 跳躍對縱向運動幅度的影響
根據(jù)耐波性原理將滑行艇的運動進行無量綱化,定義ζ為滑行艇升沉運動幅度,ζW為波幅,定義ζ/ζW為滑行艇無量綱升沉運動幅值。圖11和圖12分別給出了λ=2L和λ=4L時的升沉運動幅度。θ為縱搖角幅度值,K為波數(shù),縱搖運動無量綱幅值定義為θ/(KζW),圖13、14分別給出了λ =2L和4L時的縱搖運動幅度。圖11~14中同時給出了曲線上各點對應的運動類型,以便分析運動類型對運動幅值的影響。
圖11~14中升沉和縱搖的無量綱運動幅值給出了相同的運動幅值變化規(guī)律。由圖中可知,當滑行艇未發(fā)生跳躍時,升沉和縱搖的無量綱幅值隨波高增大均呈線性減小趨勢。當規(guī)則跳躍發(fā)生時,運動幅值仍然呈下降趨勢,但下降速度明顯增大。由此表明規(guī)則跳躍的出現(xiàn)對滑行艇迎浪運動規(guī)律產(chǎn)生了影響,規(guī)則跳躍使滑行艇在經(jīng)過波峰后跳起,越過了下坡面與波谷與下一上坡面與波峰接觸,因此運動幅值較小。然而,在無規(guī)則跳躍運動中,滑行艇與波浪相互作用的相位是隨機的,運動呈現(xiàn)不穩(wěn)定性。當滑行艇發(fā)生不規(guī)則跳躍時,無量綱運動幅值隨波高變化規(guī)律被徹底改變,下降趨勢直接轉變?yōu)樯仙厔荩⒃谶_到峰值后又出現(xiàn)回落。
結合2.1中對3種運動隨時間變化曲線的分析可知,當滑行艇從無跳躍進入規(guī)則跳躍時,運動規(guī)律只發(fā)生了小范圍內的變化,從安全性角度而言,運動尚在可接受的范圍內。但當滑行艇發(fā)生不規(guī)則跳躍時,運動規(guī)律發(fā)生較大變化且無規(guī)律可循,運動狀態(tài)不穩(wěn)定,垂向加速度表明砰擊嚴重,是實際設計中應避免遭遇的海況。

圖11 λ=2L時升沉運動幅度Fig.11 The amplitudes of heavemotionswithλ=2L

圖12 λ=4L時升沉運動幅度Fig.12 The am p litudes of heavemotions withλ=4L
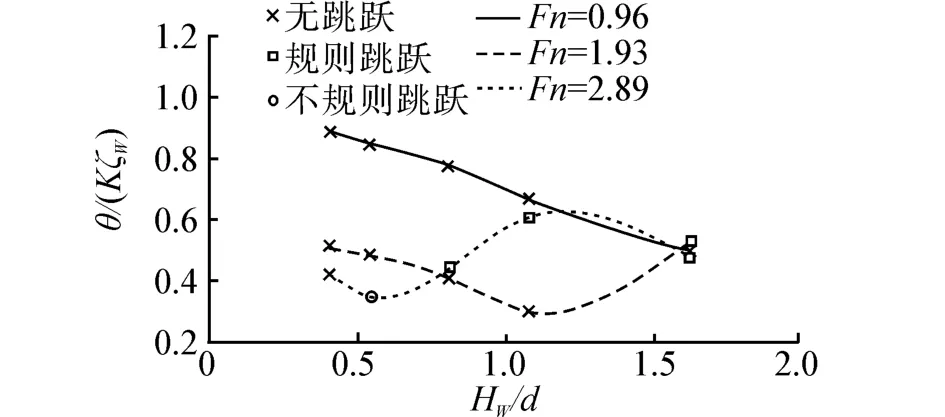
圖13 λ=2L時縱搖運動幅度Fig.13 The amplitudes of pitch motionswithλ=2L
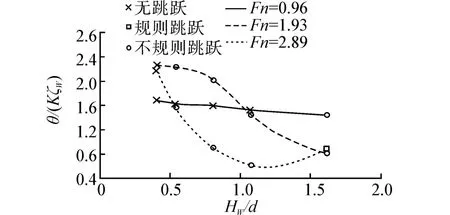
圖14 λ=4L時縱搖運動幅度Fig.14 The amplitudes of pitch motionswithλ=4L
3 結論
本文基于RANSE VOF求解器對高速滑行艇規(guī)則波中迎浪縱向運動規(guī)律進行了數(shù)值研究,得到以下結論:
1)滑行艇在規(guī)則波中做迎浪運動時,其縱向運動可分為3種運動形式:無跳躍運動,規(guī)則跳躍運動和不規(guī)則跳躍運動,3種運動發(fā)生的條件與波高、波長及滑行艇航速相關;
2)滑行艇迎浪運動時,在一定波長范圍內遭遇較大波高會導致滑行艇發(fā)生跳躍,隨著航速增加,跳躍在更廣的波長范圍、遭遇更小的波高時發(fā)生;
3)滑行艇不規(guī)則跳躍的發(fā)生區(qū)間分布在波陡較大的波浪參數(shù)范圍,隨著航速增大,不規(guī)則跳躍運動更易于發(fā)生;
4)規(guī)則跳躍和不規(guī)則跳躍均對滑行艇迎浪運動無量綱幅值規(guī)律產(chǎn)生影響,規(guī)則跳躍對滑行艇迎浪運動規(guī)律影響較小,而不規(guī)則跳躍會徹底改變運動規(guī)律,不規(guī)則跳躍一般發(fā)生在較惡劣的海況下,此時滑行艇運動劇烈,穩(wěn)定性較差,處于危險航行狀態(tài)。
[1]CHAMBLISSD B,BOYD G M.The planing characteristics of two V-shaped prismatic surfaces having angles of deadrise of 20°and 40°[R].Washington:Langley Aeronautical Laboratory:NACA.1953:28-76.
[2]SAVITSKY D.Hydrodynamic design of planing hulls[J].Marine Technology,1964,1(1):71-95.
[3]ZHAO R,F(xiàn)ALTINSEN O M,HASLUM H.A simplified non-linear analysis of a high-speed planing craft in calm water[C]//FAST’97.London,UK,1997:431-438.
[4]SUN Hui,F(xiàn)ALTINSEN O M.The influence of gravity on the performance of planning vessels in calm water[J].JEng Math,2007(58):91-107.
[5]SUN Hui,F(xiàn)ALTINSEN O M.Hydrodynamic forces on a planing hull in forced heave or pitch motions in calm water[C]//22nd WWWFB.Plitvice,Croatia,2007:185-188.
[6]SUN Hui,F(xiàn)ALTINSEN O M.Numerical study of planing vessels in waves[J].Journal of Hydrodynamics,Ser B,2010,22(5):468-475.
[7]董文才,岳國強.深V型滑行艇縱向運動試驗研究[J].船舶工程,2004,26(2):14-16.DONGWencai,YUEGuoqiang.Experimental study on longitudinalmotion of deep-V-shaped planning craft[J].Ship Engineering,2004,26(2):14-16.
[8]董文才,劉志華,吳曉光,等.滑行艇波浪中縱向運動理論預報的新方法[J].船舶力學,2007,11(1):55-61.DONGWencai,LIU Zhihua,WU Xiaoguang,et al.A new theoreticalmethod on longitudinalmotion of planing craft in wave[J].Journal of Ship Mechanics,2007,11(1):55-61.
[9]AZCUETA R.Computation of turbulent free-surface flows around ships and floating bodies[D].Harburg:Technical U-niversity of Hamburg,2001:33-40.
[10]SU Yumin,CHEN Qingtong.Numerical simulation of a planing vessel at high speed[J].Journal of Marine Science and Application,2012,11(2):178-183.
[11]KATAYAMA T,HINAMIT,IKEDA Y.Longitudinalmotion of a super high-speed planing craft in regular head waves[C]//4thOsaka Colloquium on Seakeeping Performance of Ships,Osaka,Japan,2000:214-220.
[12]張志榮,李百齊,趙峰.船舶粘性流動計算中湍流模式應用的比較[J].水動力學研究與進展,2004,19(5):1-3.ZHANG Zhirong,LIBaiqi,ZHAO Feng.The comparison of turbulence models applied to viscous ship flow computation[J].Chinese Journal of Hydrodynamics,2004,19(5):1-3.
[13]HIRT C W,NICHOLS B D.Volume of fluid(VOF)method for the dynamics of free boundary [J].Journal of Computational Physics,1981(39):201-225.
[14]CHUNG M H.Cartesian cut cell approach for simulating incompressible flows with rigid bodies of arbitrary shape[J].Computers& Fluids,2006,35(6):607-623.
[15]WANG Shuo,SU Yumin,ZHANG Xi,et al.RANSE simulation of high-speed planing craft in regular waves[J].Journal of Marine Science and Application,2012,11(4):447-452.
[16]王碩,蘇玉民,杜欣.滑行艇靜水直航及波浪中運動的數(shù)值模擬[J].華南理工大學學報,2013,41(4):119-126.WANG Shuo,SU Yumin,DU Xin.Numerical simulation of planing crafts sailing in calm water and in waves[J].Journal of South China University of Technology,2013,41(4):119-126.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技信息(2016年14期)2016-07-31 21:16:32