
基于背景差分法在焊縫缺陷檢測(cè)中的應(yīng)用
2014-11-08 09:45:12沈禎杰廖志超
沈禎杰, 孫 俊, 廖志超
(江南大學(xué) 物聯(lián)網(wǎng)工程學(xué)院,江蘇 無錫 214122)
電阻焊是金屬罐制造業(yè)中最常用的高速焊接方法。生產(chǎn)中的焊接質(zhì)量,通常是通過定時(shí)隨機(jī)抽樣觀察和做剪拉等破壞性試驗(yàn)來檢查。在這樣的測(cè)試中,樣本被周期地間歇從生產(chǎn)線上取下來進(jìn)行檢查。一般來說,這些測(cè)試樣本的結(jié)果也能反映未檢測(cè)部分的質(zhì)量,但是由于其不具有實(shí)時(shí)性,且依賴人工進(jìn)行檢測(cè),既影響工作效率,檢測(cè)結(jié)果又有一定的延遲性。
隨著科學(xué)的發(fā)展,機(jī)器視覺得到越來越廣泛的應(yīng)用,本文正是論證將機(jī)器視覺技術(shù)應(yīng)用到金屬罐焊縫檢測(cè)系統(tǒng)中的有關(guān)理論與技術(shù)問題。本文采用高速面陣CCD相機(jī)采集數(shù)字圖像,對(duì)采集的圖像進(jìn)行相應(yīng)的圖像處理,能夠準(zhǔn)確快速地檢測(cè)出焊接中是否存在缺陷,同時(shí)將具有焊縫缺陷的金屬罐從生產(chǎn)線上剔除,提高了焊縫生產(chǎn)線的工作效率。
1 傳統(tǒng)方法
在計(jì)算機(jī)視覺系統(tǒng)中,運(yùn)動(dòng)目標(biāo)的檢測(cè)與分割是一個(gè)非常重要的問題,應(yīng)用與視頻監(jiān)視,交通監(jiān)測(cè),圖像壓縮等許多方面,一般通過以下3種方法進(jìn)行運(yùn)動(dòng)檢測(cè):光流法、相鄰幀差法和背景差分法。
光流法[1-2]在不需要背景區(qū)域的任何先驗(yàn)知識(shí)條件下就能夠?qū)崿F(xiàn)對(duì)運(yùn)動(dòng)目標(biāo)的檢測(cè)和跟蹤,而且可以應(yīng)用于背景整體運(yùn)動(dòng)的情況。但是光流法的計(jì)算量非常大,而且對(duì)噪聲比較敏感,對(duì)硬件要求也比較高。
幀間差分法[3]是一種基于像素的運(yùn)動(dòng)檢測(cè)方法,它通過對(duì)視頻圖像序列中相鄰的2個(gè)或3個(gè)圖像進(jìn)行差分運(yùn)算來獲得運(yùn)動(dòng)物體輪廓。幀間差分法對(duì)動(dòng)態(tài)環(huán)境有很強(qiáng)的自適應(yīng)能力,但不能完全提取出所有的屬于運(yùn)動(dòng)對(duì)象的特征像素點(diǎn),在運(yùn)動(dòng)物體內(nèi)部容易產(chǎn)生空洞,這樣的檢測(cè)結(jié)果不利于進(jìn)一步的對(duì)象識(shí)別與分析。
背景差分法通過對(duì)輸入圖像與背景圖像的每個(gè)像素點(diǎn)的灰度值進(jìn)行比較,從而分割出運(yùn)動(dòng)目標(biāo)。由于是將當(dāng)前輸入圖像的每個(gè)像素與背景圖像逐一比較,因此在運(yùn)用背景差分法時(shí)要求前景像素的灰度值和背景像素的灰度值存在一定的差別,同時(shí)要求攝像機(jī)是靜止的。背景差分法具有實(shí)現(xiàn)簡(jiǎn)單,運(yùn)算速度快,在大多數(shù)情況下檢測(cè)結(jié)果完整的突出優(yōu)點(diǎn),且能夠較完整地提取目標(biāo)點(diǎn),但是對(duì)光照和外部條件造成的動(dòng)態(tài)場(chǎng)景變化過于敏感。背景差分法的關(guān)鍵在于選取合適的背景模型部分,一般包括初始背景和背景更新兩個(gè)部分。
2 系統(tǒng)原理
如圖1所示,第17幀圖像為焊縫有缺陷的圖像,其他的為正常的焊縫圖像。從下面的圖像中可以得出焊縫圖像具有以下幾個(gè)特點(diǎn):
a)焊縫的形狀大致為矩形,但是焊縫的邊界有一定的起伏,其焊縫的紋理有一定的變化;
b)沒有缺陷的焊縫圖像大體是相同的;
c)焊縫中的缺陷部分在視頻中移動(dòng)迅速,缺陷部分和焊縫部分圖像類似。
根據(jù)焊縫圖像的特征,可以將焊縫缺陷實(shí)時(shí)檢測(cè)轉(zhuǎn)變?yōu)檫\(yùn)動(dòng)目標(biāo)的實(shí)時(shí)檢測(cè),將沒有缺陷的焊縫圖像整體都作為背景圖像,而有缺陷的焊縫圖像中的焊縫部分,則可以視為快速的運(yùn)動(dòng)目標(biāo)。本文算法是從一組實(shí)時(shí)焊縫檢測(cè)視頻圖像序列中,按照一定的假設(shè),選擇像素灰度構(gòu)造當(dāng)前的背景圖像模型,通過檢測(cè)到運(yùn)動(dòng)目標(biāo),提取運(yùn)動(dòng)目標(biāo)圖像,對(duì)其進(jìn)行圖像分析,判斷其是否為焊縫的缺陷及其缺陷類型。
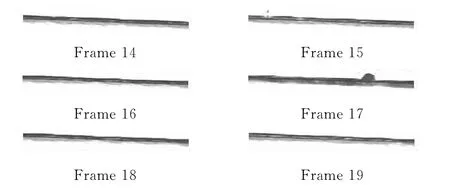
圖1 焊縫原始圖像
3 假設(shè)的選擇
背景圖像的自適應(yīng)更新對(duì)運(yùn)動(dòng)目標(biāo)提取的準(zhǔn)確性有很大的影響,所以背景圖像的自適應(yīng)更新至關(guān)重要。近年來,人們對(duì)如何實(shí)現(xiàn)背景圖像的自適應(yīng)更新提出了許多方法,主要可分為兩大類[4]:第一類是建立背景模型并采用自適應(yīng)方法對(duì)模型參數(shù)進(jìn)行調(diào)整,第二類是從過去的一組觀測(cè)圖像中按照一定的假設(shè)選擇像素灰度構(gòu)成當(dāng)前的背景圖像。
第一類方法都需要進(jìn)行模型初始化,通常假定在初始化階段,背景圖像中不能含有運(yùn)動(dòng)前景,這種假設(shè)在實(shí)際條件下很難滿足。而且其建立的模型容易產(chǎn)生混合現(xiàn)象,大多數(shù)這類算法都需要大量的計(jì)算時(shí)間。由Friedman和Russell[5]提出將像素的灰度值看作是3個(gè)高斯分布的加權(quán),這3個(gè)高斯分布分別對(duì)應(yīng)于背景、前景和陰影,同時(shí)采用EM算法獲得模型參數(shù)。該算法能夠迅速適應(yīng)場(chǎng)景變化,但是在計(jì)算量上是相對(duì)比較大,并且容易產(chǎn)生混合現(xiàn)象。如果背景圖像比較復(fù)雜的情況時(shí),僅用一個(gè)高斯分布是不能構(gòu)造好背景模型。
第二類方法在背景初始化時(shí)不需要考慮背景中是否含有運(yùn)動(dòng)前景,可以有效地避免混合現(xiàn)象,但是,由于這類方法是從過去一段圖像中重構(gòu)背景模型,因此不能夠適應(yīng)迅速的場(chǎng)景變化,有一定的時(shí)間延遲性。Kornprobst等人[6]提出的一種假設(shè),即背景在圖像序列中總是最經(jīng)常被觀測(cè)到,這就說明,背景像素在圖像序列中出現(xiàn)的頻率是最高的。根據(jù)這個(gè)假設(shè)Kornprobst等人提出一種基于par-tial differential equations的背景重構(gòu)和運(yùn)動(dòng)分割算法,該算法能有效地避免混合現(xiàn)象,但是該算法比較復(fù)雜,所涉及的參數(shù)不容易設(shè)置。
本文的算法的前提假設(shè)主要是根據(jù)Kornprobst等人提出的假設(shè):背景在圖像序列中總是最經(jīng)常被觀測(cè)到,即背景像素在圖像序列中出現(xiàn)的頻率是最高的。并結(jié)合Friedman和Russell的理論,認(rèn)為背景圖像的像素灰度值可以看作是高斯分布的加權(quán),提出一種快速的背景重構(gòu)算法。該算法在保留原有能夠有效避免混合現(xiàn)象優(yōu)點(diǎn)的同時(shí),有效降低的復(fù)雜程度,并減少運(yùn)算時(shí)間。從而能使算法在保證檢測(cè)準(zhǔn)確率的基礎(chǔ)上,滿足在高速焊接生產(chǎn)線上的焊縫缺陷檢測(cè)的目標(biāo)速度。
4 背景圖像的建立和更新
4.1 EM算法
EM(Expectation-maximization algorithm)算法即最大期望算法。該算法在概率模型中尋找參數(shù)最大似然值,其中概率模型依賴于無法觀測(cè)的隱藏變量。EM算法就是通過迭代地最大化完整數(shù)據(jù)的對(duì)數(shù)似然函數(shù)的期望,來最大化不完整數(shù)據(jù)的對(duì)數(shù)似然函數(shù)。EM算法是無監(jiān)督的聚類迭代算法,該算法經(jīng)過兩個(gè)步驟交替進(jìn)行計(jì)算:第一步是計(jì)算期望(E),利用對(duì)隱藏變量的現(xiàn)有估計(jì)值,計(jì)算其最大似然估計(jì)值;第二步是最大化(M),最大化在E步上求得的最大似然值來計(jì)算參數(shù)的值。M步上找到的參數(shù)估計(jì)值被用于下一個(gè)E步計(jì)算中,這個(gè)過程不斷交替進(jìn)行。
4.2 基于概率的背景重構(gòu)算法
本文采用2個(gè)高斯分布的混合模型來表示背景像素的分布規(guī)律,并采用線性插值法更新均值和距離。從而避免算法高度依賴初始值的選擇,并且提高了算法的運(yùn)算速度。處理圖像序列的算法步驟為:第一步,獲取兩個(gè)高斯混合模型的初始化參數(shù);第二步,用訓(xùn)練樣本對(duì)模型進(jìn)行訓(xùn)練,更新像素點(diǎn)的均值和距離;第三步,選出出現(xiàn)頻率最高的灰度值高斯模型的均值作為該像素點(diǎn)的背景灰度值。
步驟1:獲取兩個(gè)高斯分布模型的初始化參數(shù)。
一般初始化高斯混合模型是根據(jù)經(jīng)驗(yàn)給予一個(gè)先驗(yàn)初始值,這種初始化法的穩(wěn)定性較差。因此,我們應(yīng)該采用一個(gè)能自動(dòng)初始化高斯混合模型的方法,以提高算法的穩(wěn)定性。具體步驟描述如下:
1)在圖像序列中隨機(jī)選取一張圖像;
2)使用Otsu算法獲取閾值T,這將產(chǎn)生兩組像素,G1由灰度值小于等于T的所有像素組成,G2由所有大于T的像素組成;
3)G1像素是屬于焊縫圖像區(qū)域,G2屬于空白圖像區(qū)域;
4)對(duì)G1和G2的像素分別計(jì)算平均灰度值u1和u2;
5)對(duì)G1和G2的像素分別計(jì)算平均方差值v1和v2;
6)我們定義焊縫圖像區(qū)域的高斯模型為G1(u1,v1,k1),空白圖像區(qū)域的為G2(u2,v2,k2)。其中,參數(shù)u1和u2為聚類中心,參數(shù)v1和v2為聚類距離,參數(shù)k1和k2為頻率。
步驟2:用訓(xùn)練樣本對(duì)模型進(jìn)行訓(xùn)練,更新像素點(diǎn)的均值和距離。
我們?yōu)楸尘皥D像建立一個(gè)2維矩陣。用G1(u1,v1,k1)將第一維矩陣初始化;用G2(u2,v2,k2)將第二維矩陣初始化。在訓(xùn)練樣本像素點(diǎn)(x,y)的灰度值定義為f(x,y)。下面的步驟將講述如何更新聚類中心和距離。
將訓(xùn)練樣本中所有的像素進(jìn)行分類,判斷像素屬于哪個(gè)聚類中心。如果f(x,y)屬于Gi(ui,vi,ki),其中i=1,2;則根據(jù)下面的公式更新其頻率,聚類中心和距離。
重復(fù)步驟2二十一次,這樣高斯模型中的頻率就清楚的指示背景圖像的像素f(x,y)屬于哪個(gè)組像素。
步驟3:選出出現(xiàn)頻率最大的灰度值高斯模型的均值作為該像素點(diǎn)的背景灰度值。
比較每個(gè)像素的兩個(gè)高斯模型的頻率,根據(jù)我們的假設(shè),哪個(gè)模型的頻率更高,則該模型的聚類中心是背景圖像的灰度值。
4.3 運(yùn)動(dòng)目標(biāo)的提取

4.4 背景模型的更新
背景圖像應(yīng)當(dāng)能自適應(yīng)更新,才能保證檢測(cè)的穩(wěn)定性和準(zhǔn)確性。不同的重構(gòu)背景算法,其背景更新方法也是有不同的。基于模型的背景重構(gòu)算法,大多是通過自適應(yīng)調(diào)整模型參數(shù)實(shí)現(xiàn)背景的更新[7]。而從過去一段圖像序列中重構(gòu)背景圖像算法,則多數(shù)采用定時(shí)背景更新,即在運(yùn)行固定的一段時(shí)間之后,從新抽取一段圖像序列進(jìn)行背景重構(gòu)。這種背景更新方法只適用于背景緩慢變化的情況。根據(jù)本文涉及的生產(chǎn)情況,生產(chǎn)線是在生產(chǎn)車間里,所以外部環(huán)境問題,不存在背景緩慢變化的情況,因此定時(shí)背景更新算法不適合本文的生產(chǎn)情況。
本文采用 Haritaoglu等人[8-9]提出的一種背景更新策略,若在當(dāng)前圖像與背景圖像差分后得到差分圖像中,發(fā)生變化的像素?cái)?shù)與全部像素?cái)?shù)的百分比大于某一個(gè)閾值(通常取80%),則背景發(fā)生了變化;若連續(xù)多幀圖像中這一比值依然很大,則重新抽取此時(shí)的圖像序列,將背景模型重新初始化。該算法不但能適應(yīng)背景圖像的突然變化,而且能有效減少背景更新的頻率,符合本文算法所需要的快速性。
5 實(shí)驗(yàn)結(jié)果及分析
根據(jù)上文提出的算法為基礎(chǔ),建立了實(shí)時(shí)焊縫缺陷檢測(cè)系統(tǒng)。實(shí)驗(yàn)硬件環(huán)境為:CPU主頻為3.19GHz、內(nèi)存為3.0GB;實(shí)驗(yàn)軟件環(huán)境為:Windows 7、Visual Studio 2010、OpenCV視覺庫。
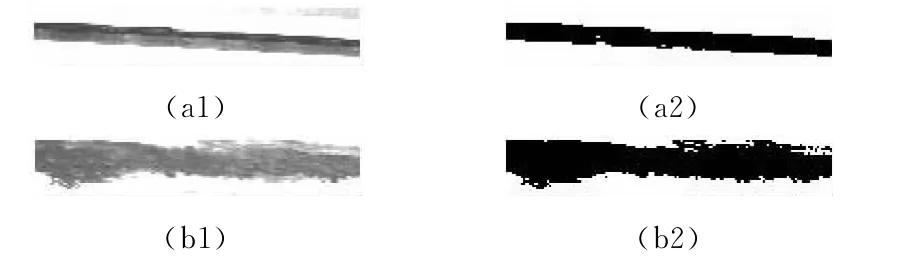
圖2 焊縫二值化圖像
其中(a1)圖像為正常圖像,(b1)圖像為具有缺陷的圖像,(a2)、(b2)分別為其二值化后的圖像。二值化算法為Otsu`s算法。
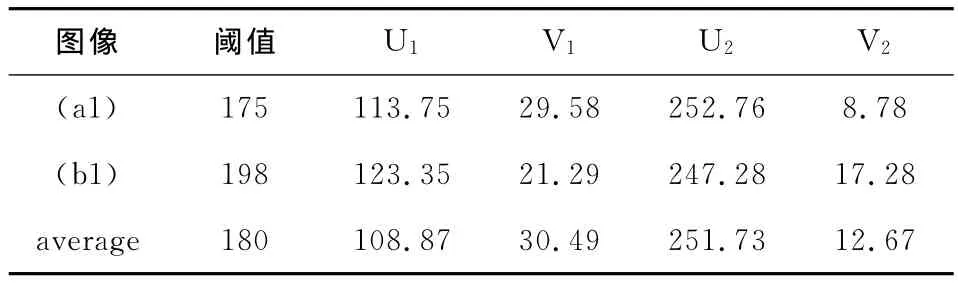
表1 模型初始化參數(shù)
表1為高斯模型的初始化參數(shù),我們可以發(fā)現(xiàn),(a1)、(a2)圖像的參數(shù)基本接近。因此,初始化圖片是否為缺陷圖片對(duì)本算法沒有影響,這樣就保證了系統(tǒng)的穩(wěn)定性。
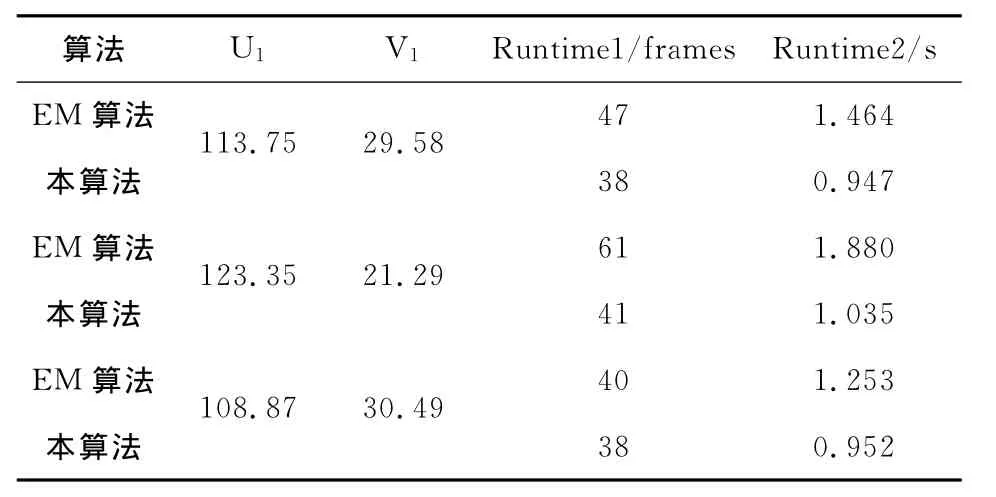
表2 背景圖重構(gòu)時(shí)間
在表2中,Runtime1代表構(gòu)建背景圖像所需要的訓(xùn)練圖片數(shù),Runtime2表示構(gòu)建背景圖像所需要的時(shí)間。從表中數(shù)據(jù)可以發(fā)現(xiàn),本文改進(jìn)的算法,對(duì)于訓(xùn)練圖像的需求量更少,即穩(wěn)定性更高。同時(shí),表現(xiàn)出的來的背景重構(gòu)速度也較優(yōu)。
圖3中,(a1)、(a2)和(a3)是兩種不同的背景圖片。產(chǎn)生兩種不同背景的原因是產(chǎn)品批次的不同。因?yàn)椴煌漠a(chǎn)品,因材質(zhì)、漆面等不同所表現(xiàn)出來的光學(xué)特性不一致。所以獲取的圖像,其銳度、紋理等表現(xiàn)不同。
在檢測(cè)過程中,當(dāng)出現(xiàn)產(chǎn)品變換時(shí),所獲取的圖像與背景的差分圖像會(huì)出現(xiàn)明顯的不匹配。當(dāng)這種不匹配度達(dá)到某一閾值時(shí),通常認(rèn)為是產(chǎn)品批 次發(fā)生了變化,需要重構(gòu)背景模型。

圖3 處理后的焊縫圖像

表4 檢測(cè)結(jié)果
在該組實(shí)驗(yàn)中,累計(jì)檢測(cè)了976張不同類型的焊縫圖片,表4的檢測(cè)結(jié)果表明,本文提出的算法滿足的生產(chǎn)線檢測(cè)的準(zhǔn)確率要求。同時(shí),每張圖片的平均檢測(cè)時(shí)間為16ms,最長(zhǎng)檢測(cè)時(shí)間為21ms,能夠達(dá)到在線檢測(cè)的實(shí)時(shí)性要求。
6 結(jié)束語
通過上文的介紹以及實(shí)驗(yàn)結(jié)果的表明:
(1)算法能夠檢測(cè)出大部分的焊縫缺陷,提高了產(chǎn)品質(zhì)量以及生產(chǎn)線的效率;
(2)背景模板的構(gòu)建具有獨(dú)立性,即能夠適應(yīng)不同的產(chǎn)品與生產(chǎn)線。
(3)在滿足實(shí)時(shí)性的基礎(chǔ)上,達(dá)到的令人滿意的檢測(cè)準(zhǔn)確率。
[1]Horn BK,Schunk BG.Determining optical flow[J].Artificial Intelligence.1981,17(1-3):185-203.
[2]Smith SM,Brady JM.ASSET-2:Real-Time motion segmentation and shape tracking[J].IEEE Trans.on PAMI,1995,17(8):814-820.
[3]Panahi S S.S Hadadan,S Gheissari N.Evaluation of background subtraction methods[C].Digital Image Computing:Techniques and Applications.2008(DICTA’08).Canberra,Australia,2008:357-364.
[4]侯志強(qiáng),韓崇昭.基于像素灰度歸類的背景重構(gòu)算法[J].軟件學(xué)報(bào),2005,16(9):1568-1575.Hou Zhiqiang,Han Chongzhao.A Background Reconstruction Algorithm Based on Pixel Intensity Classification[J].Journal of Software,2005,16(9):1568-1576.
[5]Friedman N,Russel S.Image segmentation in video sequences:A probabilistic approach[C].In:Proc.Of the 13th Conf.on Uncertainty in Artificial Intelligence(UIA).San Francisco,1997.
[6]Kornprobst P,Deriche R,Aubert G.Image sequence analysis via partial difference equations[J].Journal of Mathematical Imaging and Vision,1999,11(1):5-26.
[7]Ridder C,Munkelt O,Kirchner H.Adaptive background estimation and foreground detection using Kalman-filter[C].In:Proc.of the Int’l Conf on Recent Advances in Mechatronics,ICRAM’95.UNESCO Chair on Mechatronics,1995:193-199.
[8]Haritaoglu I,Harwood D,Davis L.W4:Real-Time surveillance of people and their activities[J],IEEE Trans.on PAMI,2000,22(8):809-830.
[9]D W Chinchkhede,N J Uke.Image segmentation in video sequences using modified background subtraction[J].International Journal of Computer Science &Information Technology(IJCSIT),2012,4(1).
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
建材發(fā)展導(dǎo)向(2021年6期)2021-06-09 05:57:08
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
制造業(yè)自動(dòng)化(2017年2期)2017-03-20 14:26:13
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
