基于fal函數(shù)的非線性PI控制器在DC-DC變換器中的應(yīng)用
2014-11-14 08:08:02尚佳寧郝瑞祥
電工技術(shù)學(xué)報 2014年1期
關(guān)鍵詞:實驗
李 虹 尚佳寧 陳 姚 尚 倩 郝瑞祥
(1. 北京交通大學(xué)電氣工程學(xué)院 北京 100044 2. 北京交通大學(xué)電子信息工程學(xué)院 北京 100044)
1 引言
在DC-DC變換器的控制策略中,PID控制以其簡單有效,對模型誤差具有魯棒性以及易于操作的特點,得到了廣泛的應(yīng)用。
傳統(tǒng)的PID控制器是利用實際值與設(shè)定值之間的誤差,將控制誤差(P)、誤差積分(I)、誤差微分(D)3個狀態(tài)變量以線性組合方式構(gòu)成控制量。但由于其在運行狀態(tài)全局范圍內(nèi),采用一種參數(shù)固定不變的線性控制方式,使得傳統(tǒng)PID控制器常常引起系統(tǒng)快速性和超調(diào)量之間的矛盾[1-4]。而大量的分析研究表明,以某種非線性形式組合這3個狀態(tài)變量,形成變增益PID控制將有助于提高控制效果[5]。
目前,國內(nèi)外的一些專家學(xué)者已經(jīng)對傳統(tǒng) PID控制進行了非線性的修正研究,這些方法大體可以分為兩類[5]:第一類是模糊 PID類、神經(jīng)網(wǎng)絡(luò) PID類[6,7],它是利用理論較為完善的模糊數(shù)學(xué)、神經(jīng)網(wǎng)絡(luò)對常規(guī)PID進行修正。這類方法的優(yōu)點是非線性構(gòu)造能力強,能夠逼近任意的非線性函數(shù),但這類方法的參數(shù)調(diào)試較為復(fù)雜,不利于工程應(yīng)用;第二類是直接利用非線性函數(shù)進行修正[8-12],這類方法實現(xiàn)簡便,但是非線性構(gòu)造能力不如第一類方法。在PID控制中,最常用的是PI控制,本文從工程應(yīng)用的簡捷性要求出發(fā),利用非線性fal函數(shù),構(gòu)造了非線性PI控制器。
本文第二節(jié)描述了非線性fal函數(shù)的特性,用仿真研究不同參數(shù)對非線性函數(shù)的影響,并且構(gòu)建了非線性 PI控制器;第三節(jié)分別對基于非線性 PI控制器和傳統(tǒng)PI控制的Boost變換器進行仿真并對比研究;第四節(jié)為實驗驗證;第五節(jié)為全文結(jié)論。
2 基于fal函數(shù)的非線性PI控制器
2.1 非線性fal函數(shù)[13]
fal函數(shù)是一種特殊的非線性結(jié)構(gòu),它是對“大誤差,小增益;小誤差,大增益”這一控制工程界經(jīng)驗的數(shù)學(xué)擬合[14]。fal函數(shù)具有快速收斂特性,因此成為常用的非線性反饋結(jié)構(gòu),文獻[15,16]從非線性反饋效應(yīng)的角度進一步闡述了這種結(jié)構(gòu)。
fal函數(shù)表達式如下
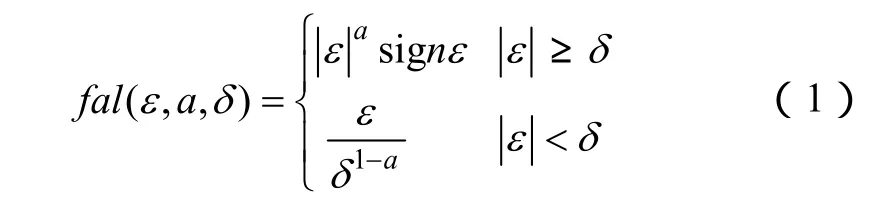
式中,δ為線性段區(qū)間長度;a決定非線性函數(shù)fal的非線性度,是0~1之間的常數(shù);ε為輸入誤差。
為直觀描述fal函數(shù)的特性,利用Matlab/Simulink搭建fal函數(shù)模型。加入幅值為1,頻率為 1rad/s的正弦信號作為輸入,保持參數(shù)δ=0 .5不變,改變a,觀測a變化對非線性fal函數(shù)的影響,輸出如圖1所示。
加入幅值為10,頻率為1rad/s的正弦信號作為輸入,保持參數(shù) 0.5a=不變,改變δ,觀測δ變化對非線性fal函數(shù)的影響。輸出波形如圖2所示。
從圖 1可知,曲線均在正弦函數(shù)幅值達到 0.5時產(chǎn)生轉(zhuǎn)折,轉(zhuǎn)折點之前為線性曲線,轉(zhuǎn)折點之后曲線呈現(xiàn)出非線性特性。而a值越小,曲線的非線性程度就越大,0a=時,輸出信號的非線性性質(zhì)最明顯,1a=時,輸出和輸入相同,表現(xiàn)為線性性質(zhì)。由此可知,a的大小影響著fal函數(shù)的非線性程度。
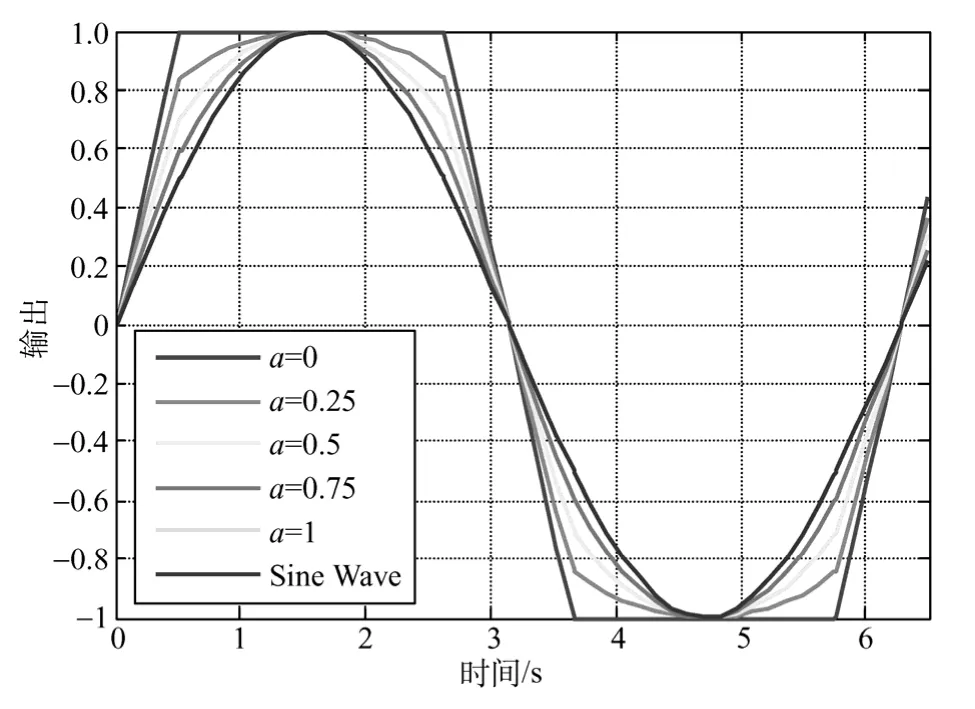
圖1 輸出隨a變化的曲線Fig.1 The output curve with the change ofa
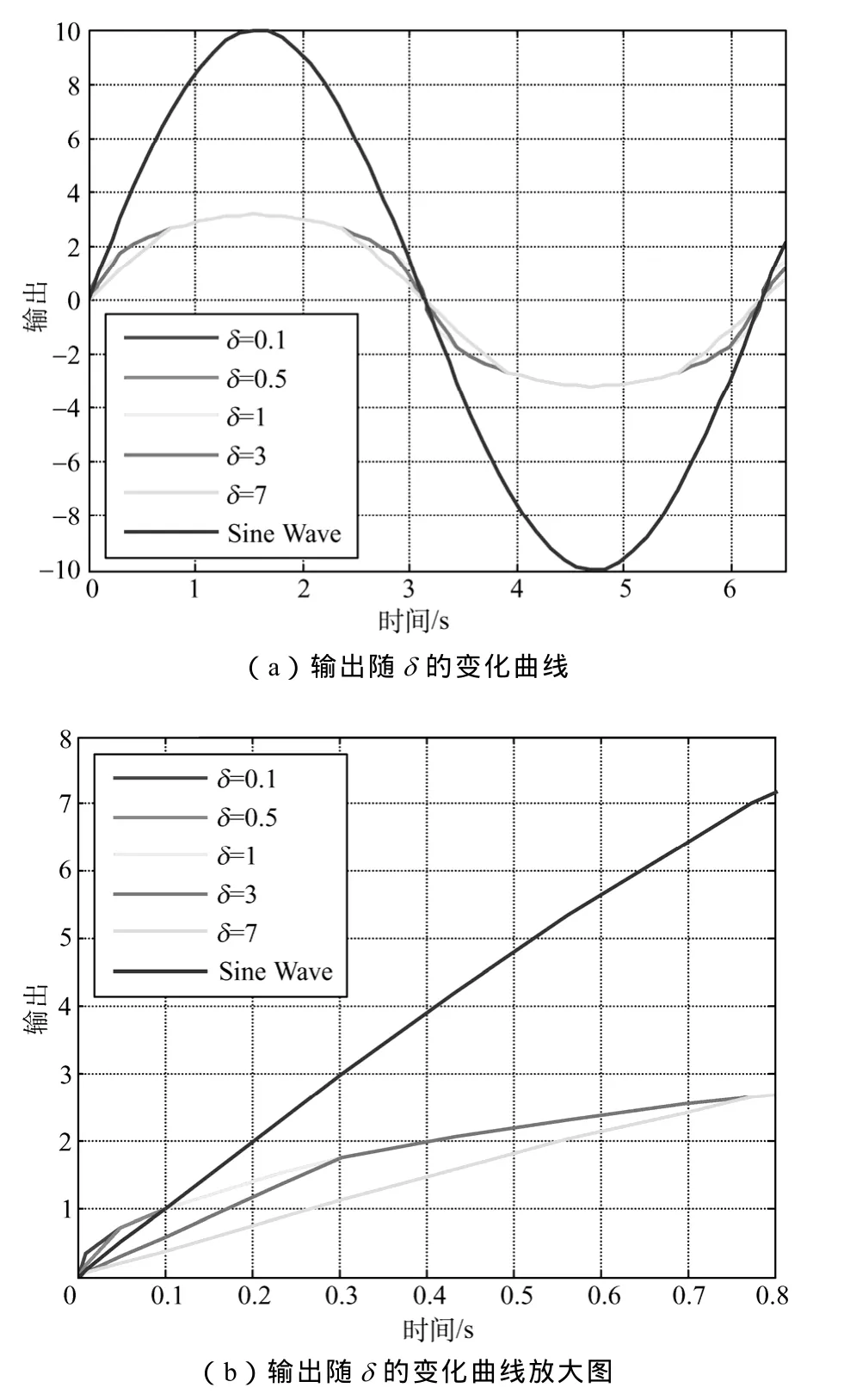
圖2 輸出隨δ變化的曲線Fig.2 The output curve with the change ofδ
圖 2中,δ由 0.1變化至 7,可以看到在曲線分別在正弦函數(shù)幅值達到δ時出現(xiàn)轉(zhuǎn)折,轉(zhuǎn)折前呈現(xiàn)出線性特性,斜率為ε/δ1-a,轉(zhuǎn)折后呈現(xiàn)非線性特性。由此可知,δ可以決定線性段區(qū)間的長度。
因此,當(dāng)輸入為誤差信號時,可以通過調(diào)節(jié)fal函數(shù)的參數(shù),使得反饋環(huán)節(jié)在誤差較大時,產(chǎn)生較小的反饋增益,在誤差較小時,產(chǎn)生較大的反饋增益,在保證系統(tǒng)的穩(wěn)定性的同時,使系統(tǒng)快速的達到穩(wěn)定。
2.2 非線性PI控制器
以fal函數(shù)作為非線性函數(shù),非線性PI控制器的組合形式如下

式中,e為誤差信號,pk、ik分別為PI環(huán)節(jié)對應(yīng)的系數(shù)。則非線性PI控制器構(gòu)成如圖3所示。
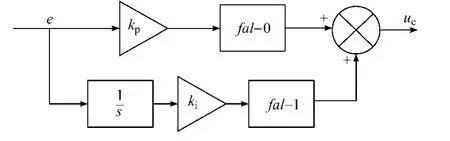
圖3 非線性PI控制器結(jié)構(gòu)Fig.3 The structure of the nonlinear PI controller
3 非線性PI控制器的應(yīng)用仿真
本文以Boost變換器為研究對象,將非線性PI控制和傳統(tǒng)PI控制分別應(yīng)用于Boost變換器的反饋環(huán)節(jié),對比兩種控制在發(fā)生電壓突變和負載突變情況下的動態(tài)調(diào)節(jié)過程非線性 PI控制的電路拓撲如圖4所示。
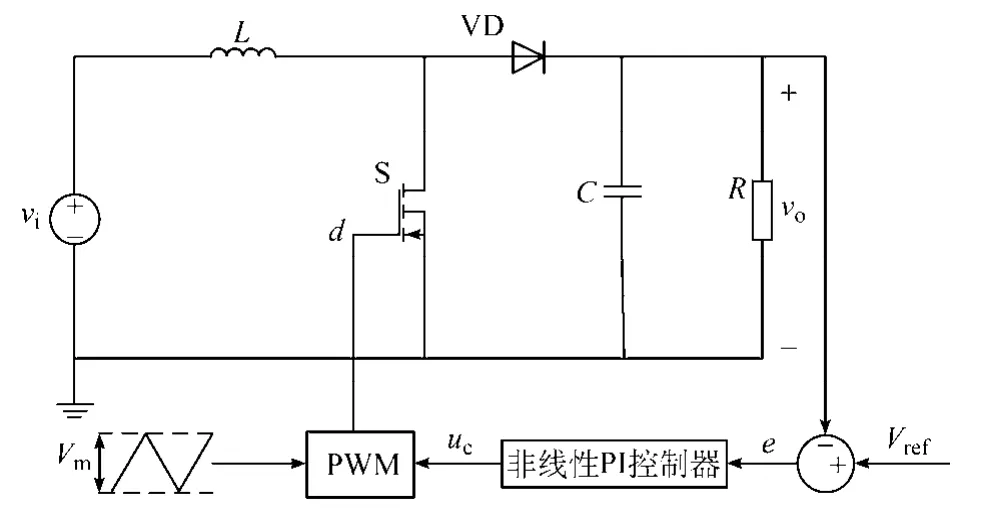
圖4 非線性PI控制的Boost電路Fig.4 The Boost circuit with the nonlinear PI control
首先經(jīng)過調(diào)試,將傳統(tǒng) PI控制參數(shù)kp、ki調(diào)至較好調(diào)制效果,此時kp=0 .006,ki=4 。然后將傳統(tǒng)PI控制器替換為非線性PI控制器,在相同PI參數(shù)下,分別調(diào)節(jié)δ、a參數(shù)。調(diào)試參數(shù)如下:δ0=0 .01,a0=0 .6,δ1=0 .05,a1=0 .9。Boost主電路參數(shù)如表1所示。
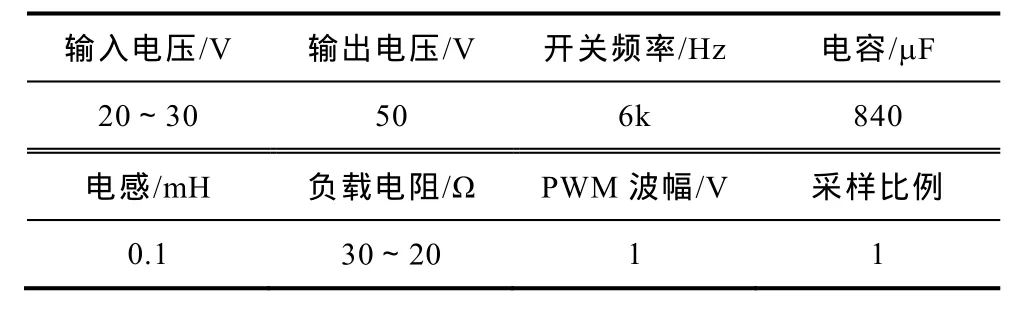
表1 仿真參數(shù)Tab.1 Simulation parameters
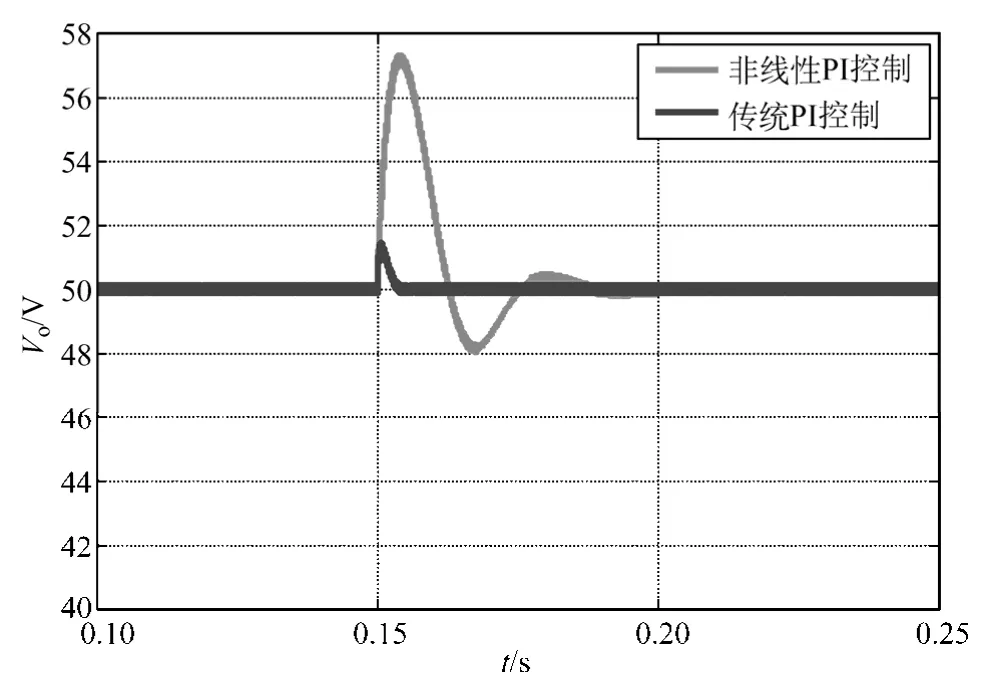
(a)輸出電壓波形
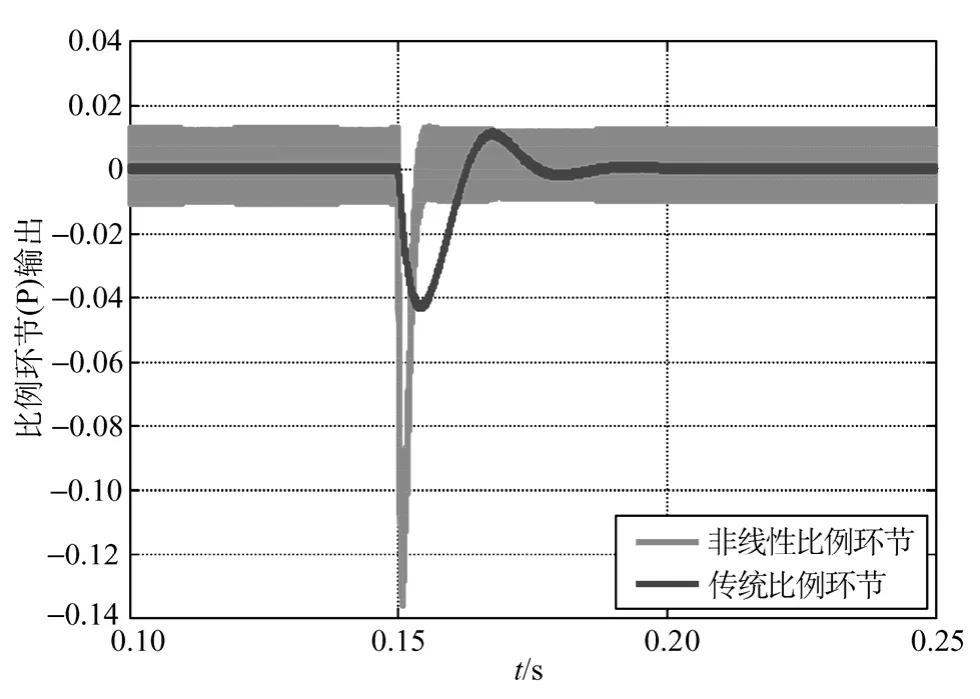
(b)比例環(huán)節(jié)的輸出波形
(c)積分環(huán)節(jié)的輸出波形
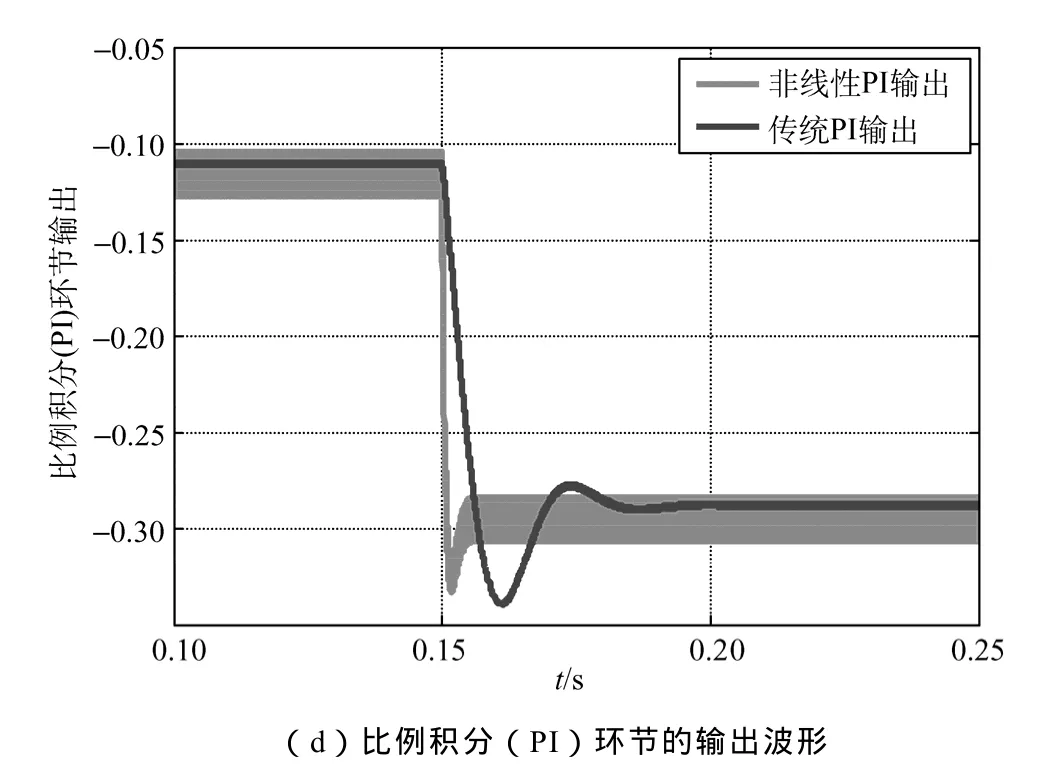
圖5 電壓突變波形Fig.5 The waveforms of the voltage jump
輸入電壓在0.15s時由20V突變至30V,傳統(tǒng)PI控制和非線性PI控制輸出電壓波形如圖5a所示,比例環(huán)節(jié)和積分環(huán)節(jié)波形如圖5b、圖5c所示。
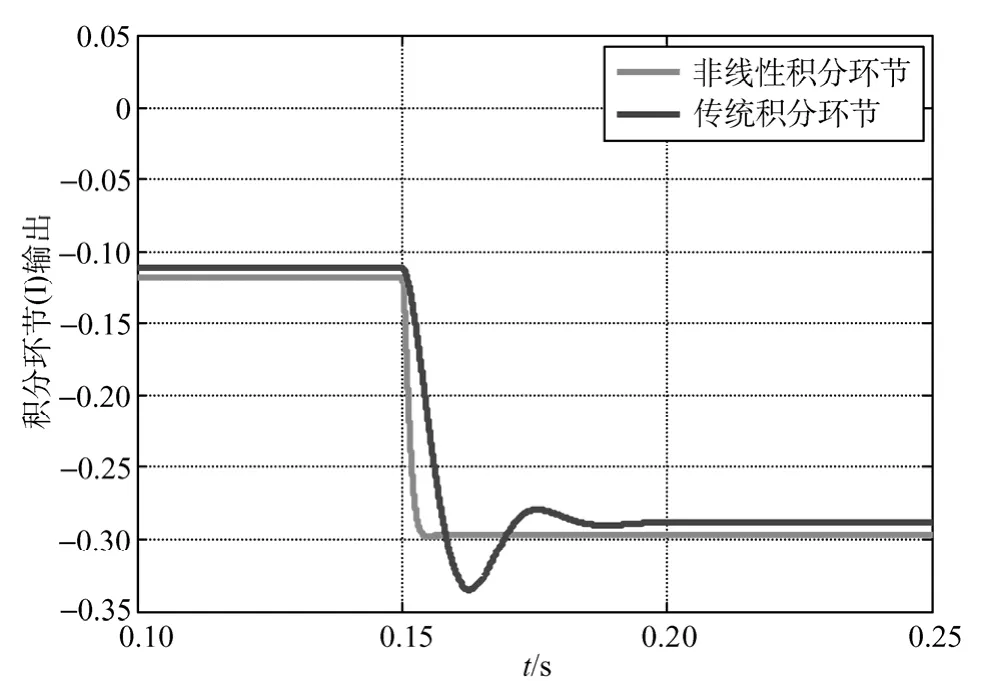
在0.15s時負載電阻由30Ω突變至20Ω,PI控制和非線性PI控制輸出電壓波形如圖6a所示,比例環(huán)節(jié)和積分環(huán)節(jié)波形如圖6b、圖6c所示。
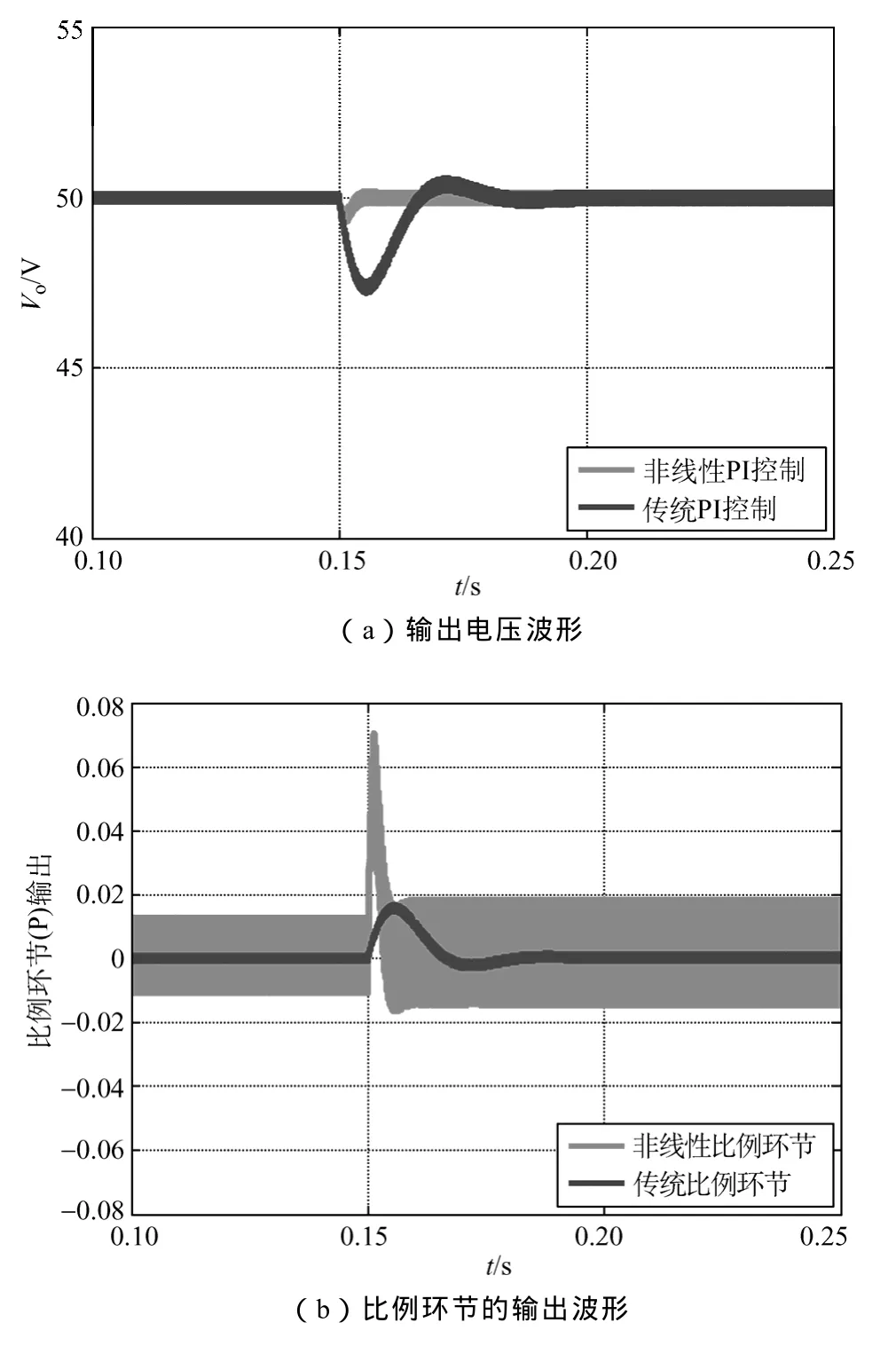
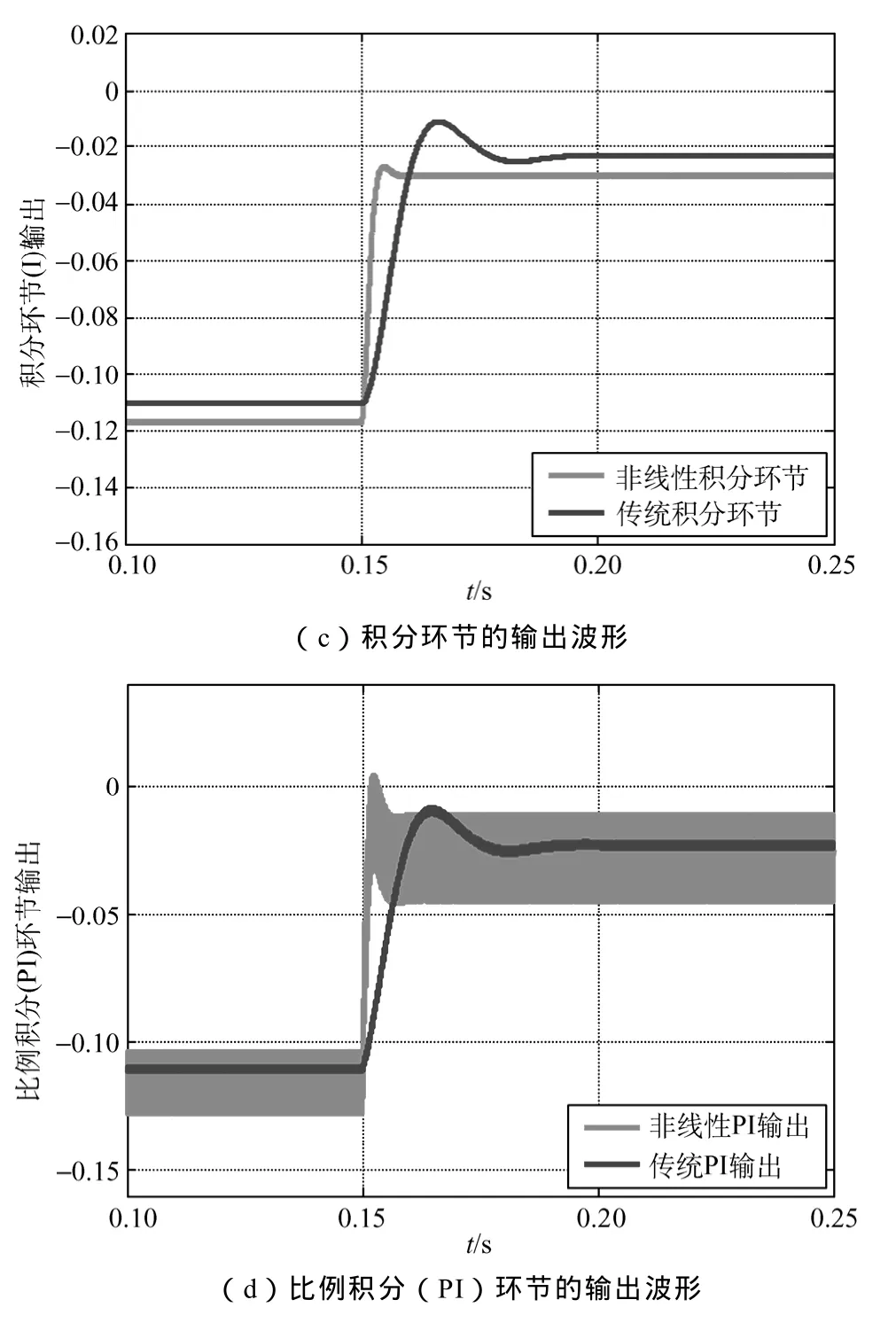
圖6 負載電阻突變波形Fig.6 The waveforms of the load changing
綜上仿真結(jié)果,對比結(jié)果如表2所示。
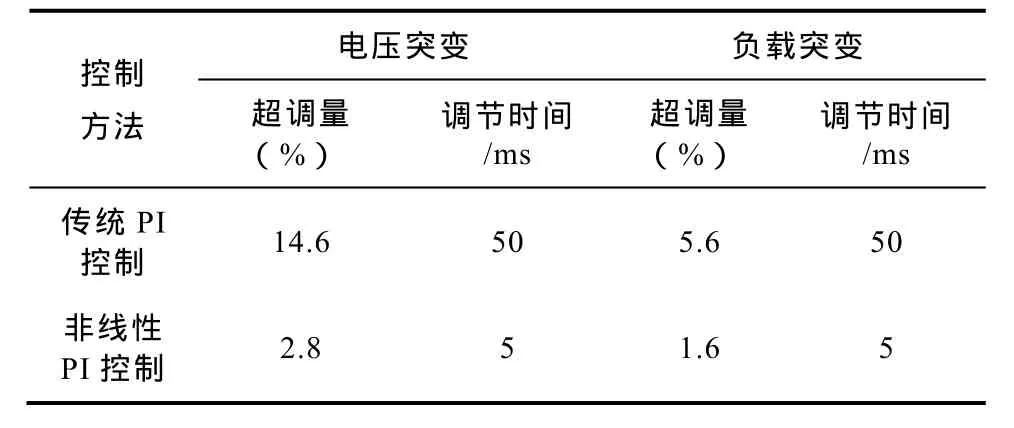
表2 動態(tài)響應(yīng)仿真對比結(jié)果Tab.2 The simulation comparisons of dynamic response
輸入電壓由20V突變至30V情況下,Boost變換器用非線性 PI控制器產(chǎn)生 1.4V的超調(diào),經(jīng)過0.005s恢復(fù)至參考電壓50V;傳統(tǒng)PI控制產(chǎn)生7.3V的超調(diào),經(jīng)過 0.05s恢復(fù)至參考電壓 50V。非線性PI控制相比PI控制超調(diào)量和調(diào)節(jié)時間更小。
在負載由30Ω突變至20Ω情況下,Boost變換器用非線性PI控制器產(chǎn)生0.8V的超調(diào),經(jīng)過0.005s恢復(fù)至參考電壓50V,傳統(tǒng)PI控制產(chǎn)生2.8V的超調(diào),經(jīng)過0.05s恢復(fù)至參考電壓50V。非線性PI控制相比PI控制超調(diào)量和調(diào)節(jié)時間更小。
從兩種擾動的比例環(huán)節(jié)和積分環(huán)節(jié)的輸出波形來看,非線性fal函數(shù)的加入使得比例環(huán)節(jié)的輸出在誤差較小時的反饋增益變大,使得控制力度得以增強,超調(diào)不會太大;之后迅速恢復(fù)穩(wěn)態(tài),使得擾動的調(diào)節(jié)時間得以縮短。
4 實驗驗證
本文對非線性PI控制器進行了理論分析,以及在加入擾動情況下進行了傳統(tǒng) PI控制和非線性 PI控制電路的仿真對比。本文搭建Boost實驗電路進行實驗,對理論分析和仿真的正確性加以驗證。
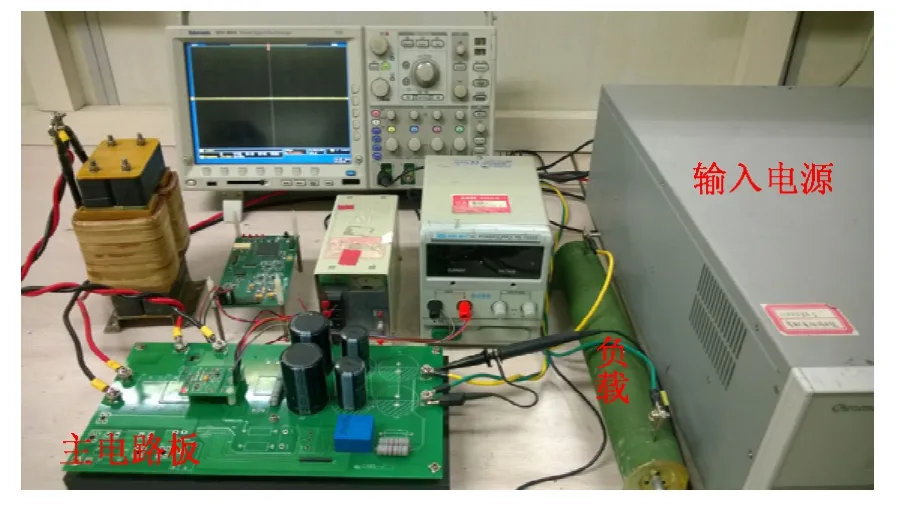
圖7 實驗平臺Fig.7 The experimental platform
實驗平臺如圖7所示。實驗參數(shù)和仿真電路參數(shù)相同,同樣進行了輸入電壓突變和負載突變兩組實驗。
輸入電壓由20V突變至30V時,傳統(tǒng)PI調(diào)節(jié)和非線性 PI調(diào)節(jié)的波形如圖 8所示;負載電阻由30Ω突變至20Ω時,傳統(tǒng)PI調(diào)節(jié)和非線性PI調(diào)節(jié)的波形如圖9所示。
從以下實驗波形可以看到,非線性PI調(diào)節(jié)下的輸出電壓波形調(diào)節(jié)過程要優(yōu)于傳統(tǒng) PI調(diào)節(jié)下的調(diào)節(jié)過程,與仿真結(jié)果相符合。
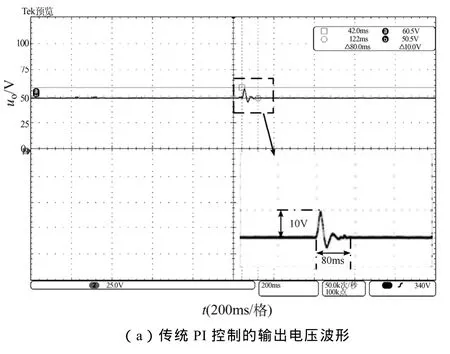
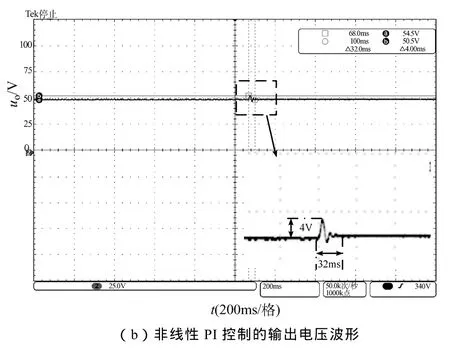
圖8 輸入電壓突變的輸出電壓波形Fig.8 The output voltage waveform of the input voltage jump
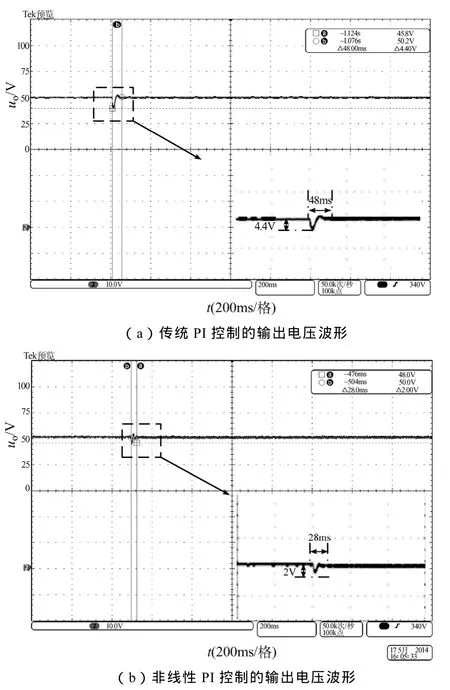
圖9 負載突變的輸出電壓波形Fig.9 The output voltage waveform of the load changing
5 結(jié)論
本文針對傳統(tǒng)PI控制器的缺點,設(shè)計了基于fal函數(shù)的非線性PI控制器,并將非線性控制器應(yīng)用于DC-DC變換器中。通過仿真和實驗對比傳統(tǒng)控制和非線性控制在電壓和負載突變下的調(diào)制過程,結(jié)果表明非線性PID控制相對于傳統(tǒng)PID控制對于外界擾動有更好的調(diào)制效果,具有較好的適用性和控制性能,為功率變換器的控制提供了一種新的選擇。
[1] 任永平,李圣怡. 一種非線性 PID控制器及其參數(shù)分析[J]. 信息與控制,2005,34(4): 486-489.
Ren Yongping,Li Shengyi. Nonlinear PID controller and its parameter analysis[J]. Information and Control,2005,34(4): 486-489.
[2] 王偉,張晶濤,柴天佑. PID參數(shù)先進整定方法綜述[J]. 自動化學(xué)報,2000,26(3): 341-355.
Wang Wei,Zhang Jingtao,Chai Tianyou. A survey of advanced PID parameter tuningmethods[J]. Acta Aut Omat Ica Sinica,2000,26(3): 341-355.
[3] 韓京清. 非線性 PID 控制器[J]. 自動化學(xué)報,1994(4): 487-490.
Han Jingqing. Nonlinear PID controller[J]. Acta Automatica Sinica,1994(4): 487-490.
[4] 王大彧,郭宏,劉治,等. 直驅(qū)閥用音圈電機的模糊非線性PID控制[J]. 電工技術(shù)學(xué)報,2011.
Wang Dayu,Guo Hong,Liu Zhi,et al. A fuzzy nonlinear PID control of voice coil motor used in direct drive valve[J]. Transactions of China Electrotechnical Society,2011.
[5] 尚宏,陳志敏,任永平. 一種新型非線性 PID 控制器及其參數(shù)設(shè)計[J]. 控制理論與應(yīng)用,2009,26(4):439-442.
Shang Hong,Chen Zhimin,Ren Yongping. Parameter selection for a new class of nonlinear PID controller[J]. Control Theory & Applications,2009,26(4): 439-442.
[6] Ying H. Sufficient conditions on general fuzzy systems as function approximators[J]. Automatica,1994,30(3): 521-525.
[7] 孫增圻. 智能控制理論與技術(shù)[M]. 北京: 清華大學(xué)出版社,1997.
[8] 韓京清. 自抗擾控制技術(shù)[J]. 前沿科學(xué),2007,1(1):24-31.
Han Jingqing. Auto disturbances rejection control technique[J]. Frontier Science,2007,1(1): 24-31.
[9] Margaliot M,Langholz G. Hyperbolic optimal control and fuzzy control[J]. IEEE Transactions on Systems,Man,and Cybernetics,Part A: Systems and Humans,1999,29(1): 1-10.
[10] Brian A,Bruce A W. Nonlinear PID control with partial state knowledge: damping without derivatives[J]. The International Journal of Robotics Research,2000,19(8): 715-731.
[11] 牛剛,冀捐灶,郭慶,等. 基于 DSC和數(shù)字預(yù)測非線性 PID控制的 DC/DC變換器[J]. 電氣應(yīng)用,2008(17).
Niu Gang,Ji Juanzao,Guo Qing,et al. DSC and Digital forcast Nonlinear PID control based on DC/DC convertor[J]. Electrotechnical Application,2008(17).
[12] 姜向龍,趙 金,萬淑蕓. 基于雙曲正切函數(shù)的非線性 PI控制器及其在感應(yīng)電動機矢量控制中的應(yīng)用[J]. 電工技術(shù)學(xué)報,2004,19(6): 85-89.
Jiang Xianglong,Zhao Jin,Wan Shuyun. A nonlinear PI speed controller based on hyperbolic function and its application in the vector control of an induction motor[J]. Transactions of China Electrotechnical Society,2004,19(6): 85-89.
[13] 王宇航,姚郁,馬克茂. Fal函數(shù)濾波器的分析及應(yīng)用[J]. 電機與控制學(xué)報,2010,14(11): 88-91.
Wang Yuhang,Yao Yu,Ma Kemao. Analysis and application of Fal function filter[J]. Electric Machines and Control,2010,14(11): 88-91.
[14] 黃一,張文革. 自抗擾控制器的發(fā)展[J]. 控制理論與應(yīng)用,2002,19(4): 485-492.
Huang Yi,Zhang Wenge. Development of active disturbance rejection controller[J]. Control Theory and Applications,2002,19(4): 485-492.
[15] Han J Q. Nonlinear design methods for control systems[C]. The Proceedings of the 14th IFAC World Congress. Beijing,1999: 521-526.
[16] Gao Zhiqiang,Huang Yi,Han Jingqing. An alternative paradigm for control system design[C].Proceedings of IEEE Conference on Control and Decision,Orlando,2001: 4578-4585.
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
