基于激光傳感器的船舶避碰預警系統
2014-11-14 03:20:14武漢理工大學能源與動力工程學院屈驍武漢理工大學工程訓練中心鄭衛剛
世界海運 2014年6期
武漢理工大學能源與動力工程學院 屈驍 武漢理工大學工程訓練中心 鄭衛剛
為了實現船舶的安全航行,航運技術主要采取兩種措施,一種是船靠港時依賴于船舶交通管理系統 (VTS),另一種是依賴于船舶避撞規則。雷達一直是這兩種措施的主要觀測設備,用來檢測和識別船只。作為普通雷達的發展,自動雷達標繪儀(Automatic Radar Plotting Aids,ARPA) 早已作為現代大型船舶上用于避免碰撞的主要儀器而得到普遍使用,對減少船舶碰撞發揮了重要的作用。隨著計算機和通信技術以及自動化技術的發展,船舶自動識別系統(Automatic Identification System)作為未來海上識別、檢測和通信系統,提高了船舶航行安全,避免了海上碰撞[1]。
無論是傳統的雷達、ARPA 技術,還是自動識別系統AIS,都是確保海上安全航行、防止碰撞的有力手段。但是從中國目前的實際情況來看,大型商船均配備較為完善的檢測系統,而中等船只和一般輕型噸位的漁船,由于現有設備的昂貴,很難大范圍得到普及。因此對于中小船只來說,高性價比的防撞系統是必需的。現階段防撞系統未考慮到船舶與船舶之間或者船舶與障礙物之間的相對速度、船舶之間相對的行駛方向、船舶前后左右不同方向預警距離要求不同這三種情況,而是機械地判斷固定的相對距離而達到預警目的,現實應用局限性很大,比如靠碼頭、船舶并排行駛等正常情況下也會發生預警。
激光器件及測量技術的發展為解決海上船舶防撞提供了一個新的途徑,它使得船舶導航、避撞甚至停靠的自動化和自適應成為可能。激光測量具有高方向性、高單色性、高亮度、測量速度快等優點,尤其是對雨霧有一定的穿透能力,大氣抗干擾能力強。結合海上船舶間測距的特點,可以采用脈沖激光測距、激光定位、激光測速來及時連續的測量目標船只與周圍船只的距離、測量目標船只與周圍船只的相對運動方向、測量目標船只與周圍船只的相對運動速度。
一、激光測距的基本原理
激光測距分為連續波相位測距和脈沖測距兩種。連續波測距是用無線電波段的頻率,對激光束進行幅度調制并測定調制光往返測線一次所產生的相位延遲[2],再根據調制光的波長,換算此相位延遲所代表的距離。連續波相位測距的精度極高,一般可達毫米級,但連續波相位測距較激光脈沖測距電路復雜,成本高。考慮到在船舶防撞系統中不需要那么高的精度,采用激光脈沖測距方法完全能夠滿足船舶防撞系統的要求[3]。
激光脈沖測距是利用測量往返脈沖間隔時間獲知距離,測量方法是在確定時間起止間用時鐘脈沖計數。這種方法可以得到10-10s以上的測量精度[3]。激光脈沖測距部分原理圖如圖1所示。由激光發射器產生作用時間為幾納秒、發射角為幾豪弧度的激光脈沖經光學系統射向被測目標,經目標反射后返回到接收系統。通過主波脈沖和回波脈沖的時間差即可測出被測距離。設目標距離為S,安全距離為S0,光脈沖往返時間為t,光在真空中的傳播速度為c(c=2.99×108m/s,光在空氣中傳輸受介質、氣壓、溫度的影響可忽略),則有

設在t時間內,有N個時鐘脈沖進入計數器,時鐘脈沖的震動頻率為?0,則:

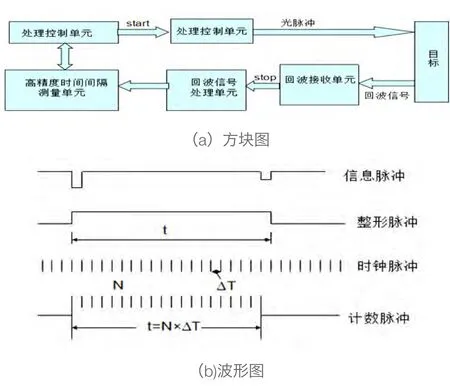
圖1 激光脈沖測距部分原理圖
上述公式中,K=c/2?0,表示每一個時鐘所代表的距離增量;如果計數器計數N個時鐘脈沖,則由式(4)可得目標距離S,K的大小決定了脈沖測距的測量計數精度。
二、船舶防撞系統的設計
1.雙自由度云臺的設計
本系統選擇了由水平方向0°~355°和垂直方向-90o~+90o的兩自由度云臺,能有效滿足大測量范圍的需要。接線說明見圖2[4]:
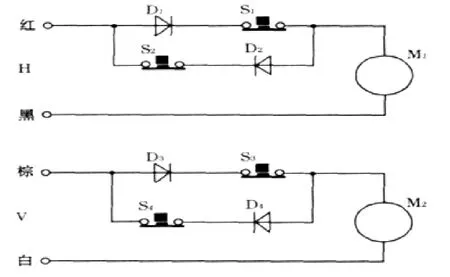
圖2 電動云臺電路原理圖
紅、黑為水平控制線,紅正黑負為水平電機向左運轉,紅負黑正為向右運轉。
棕、白為垂直控制線,棕正白負為垂直電機向上運轉,棕負白正為向下運轉。
圖3是雙自由度云臺電源的邏輯控制示意圖。89C52單片機P1接口的P1.4、P1.5、P1.6、P1.7控制4路信號實現云臺水平和垂直方向的往返運動;P1.4、P1.5實現水平電機的電源換相,P1.6、P1.7實現垂直電機的電源換相。為確保云臺正常工作,在同一時刻,水平和垂直方向電機只能有一個方向供電,74HC126中的4個緩沖(A1~A4)和74LS86中的3個異或門(M1~M3)構成一個封閉邏輯,實現4路信號的邏輯控制,以保證水平和垂直方向的唯一選通
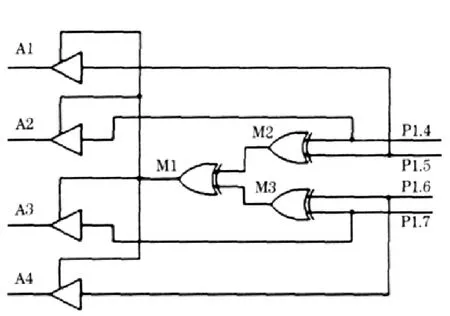
圖3 云臺電源的邏輯控制
2.船舶周圍障礙物的三維坐標定位
采用激光測距、定位、測速的原理分別測得測量目標船只與周圍船只(障礙物)之間的相對距離S、方位角θ、相對速度的大小v、相對速度與X軸正半軸的夾角β,O點為測量目標船舶電動云臺激光測距傳感器所在位置,A為周圍船舶或者障礙物,B為周圍船舶或障礙物距離測量目標船舶距離最小的位置,L為周圍船舶或障礙物距離測量目標船舶最小距離,確定測量目標船舶周圍障礙物的定位,如圖4所示。

圖4 測量目標船舶周圍障礙物的定位
3.控制系統軟件實現流程圖
以測量目標船舶的船頭為Y軸建立空間坐標系(如圖4),船舶發生碰撞與β、L、θ、S有關。周圍船舶或障礙物在不同象限β要求不同,如周圍船舶A若在第一象限,那么只有β角在π~3π/2之間才有可能發生碰撞,其他角度沒有必要預警。預警的時機與碰撞距離L和周圍船舶從A到B行駛的時間t有關,即

其中,T表示從監測位置到距離可能發生碰撞位置船舶駕駛員的反應時間,只有L和T同時符合設定值L0和T0預警才是科學的,周圍船舶所在的象限和β角大小有關。由于本系統是實時監測,因此即使在檢測期間船舶走曲線也沒有關系,一樣可以做出科學預警。控制系統軟件實現流程如圖5所示。
三、結語
本系統采用激光測距傳感器,對行船過程中船舶周圍500m的障礙物進行實時監控。在設計中利用多塊激光傳感器和電動雙自由度云臺結合,實現水平和垂直兩方向大范圍偵測;能夠不間斷的監測目標船舶與周圍障礙物的相對速度、距離和角度,并根據不同的復雜情況自主判定恰當的預警時機進行預警,有效克服了設定固定預警距離而忽略船舶間的相對速度、行駛方向的傳統防撞預警系統預警時機的不恰當性。本系統具有良好的實用價值和應用前景,相信隨著科學技術的不斷發展,激光測距技術在船舶防撞報警過程中能夠得到完美應用。
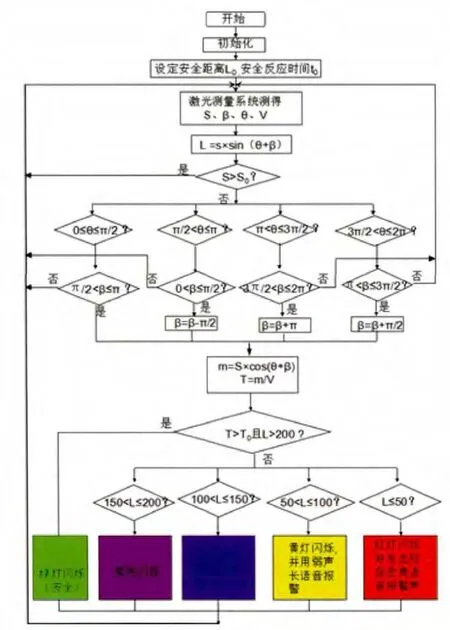
圖5 控制系統軟件實現流程
[1]章堅武,張數明.基于激光測距的船舶防撞定位系統設計[J].應用激光,2008(6):497-501.
[2]張召亮,張帆,馬智遠,等.激光測距在汽車智能防撞系統中的應用[J].中國水運,2007(7):53-54.
[3]丁洪影.基于激光測距技術的船舶防撞系統的研究[J].福建電腦,2010(4):144-145.
[4]劉巖川,王玲芬,欒慧,等.基于激光測距技術的汽車防撞系統的研究[J].儀表技術與傳感器,2008(11):96-98.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國船檢(2017年3期)2017-05-18 11:33:09
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21