基于雙目視覺的障礙物檢測算法
2014-11-20 08:18:24覃金飛韋江華
電視技術 2014年5期
林 川,張 毅,覃金飛,韋江華
(1.廣西科技大學a.電氣與信息工程學院;b.廣西汽車零部件與整車技術重點實驗室(廣西科技大學),廣西柳州545006;2.柳州城市職業學院,廣西柳州545002)
隨著汽車工業的發展,先進駕駛輔助系統(Advance Driver Assistance Systems,ADAS)已經成為智能交通系統的一個研究熱點。障礙物檢測作為ADAS的主要任務之一,能夠及時識別汽車駕駛的前方危險,增加汽車行駛安全,減少交通事故發生[1-2]。目前,基于計算機視覺的障礙物檢測主要分為單目視覺和雙目視覺檢測,采用單目視覺的方法主要是基于特征和運動并結合模式識別的方法進行檢測,但該類方法中提取特征和運動參數估計相對困難,且適應性不強[3-4]。而采用雙目視覺技術具有模仿人眼的特點,通過計算視差圖獲取距離等大量信息。近年來,通過計算U-視差、V-視差的方法在雙目視覺的障礙物檢測中獲得了廣泛的關注。文獻[5-7]采用基于雙目視覺的U-V視差障礙物檢測,先在V-視差圖中檢測出道路相關線,再結合U-視差圖對障礙物進行相應的檢測,取得了較好的檢測效果。但在汽車前方障礙物占圖像寬度比例相對較大的情況下,該類方法出現較大的誤檢測,同時對雙目攝像機的傾斜角較為敏感[8],限制了該類方法的應用場合。為了在各種道路場景中更有效和實時地檢測障礙物,本文先計算U-視差,并采用雙閾值方法移除屬于道路視差部分,然后結合原視差圖獲得移除道路的視差圖,再分別計算U-視差和V-視差實現障礙物檢測。該方法特別在障礙物占圖像寬度比例相對較大的情況下,較同類方法大大降低了誤判率,具有良好的檢測效果。
1 雙目視覺模型
雙目視覺系統模型如圖1所示,左右攝像機處于同一高度h。其中,P(XW,YW,ZW)T為世界坐標系RW中的任意一點,Ol和OR分別為雙目視覺系統左右鏡頭中心,b為雙目攝像機的基線長度,Rcl和Rcr分別為左右攝像機坐標系。設世界坐標系中的P(XW,YW,ZW)T點通過左右攝像機分別投影到左圖像平面的Pl(ul,vl)點和右圖像平面的Pr(ur,vr)點。攝像機內參數焦距為f,像素尺寸為(Su,Sv),根據攝像機的規格,有Su=Sv=S。經過雙目視覺系統極線校正后,有vr=vl=v,設雙目視覺系統攝像機光軸與水平面的夾角為θ,投影圖像平面的中心點為(uo,vo),并令q=f/s,則有
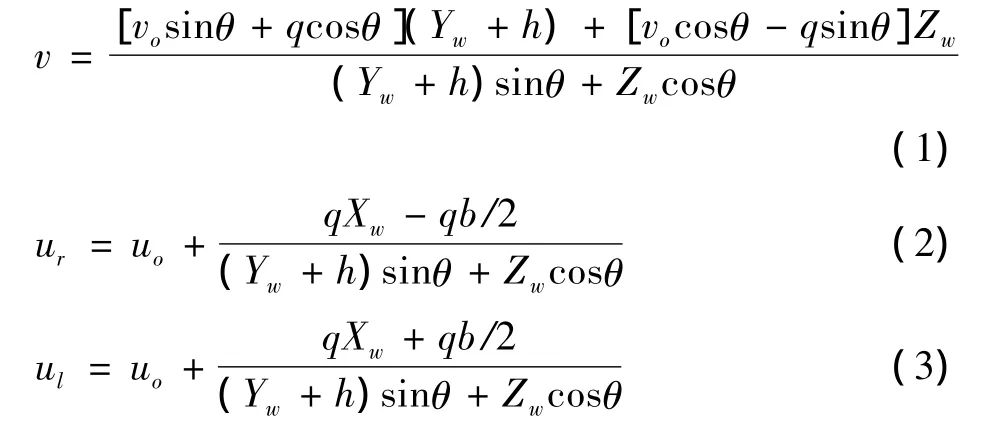
則視差為

在匹配準則的約束下,對雙目圖像所有像素點進行立體匹配,可獲取濃密視差圖。由式(4)可知,在視差圖中的灰度值可表征景物與攝像機的距離,其值越大,表示距離越近,反之越遠。
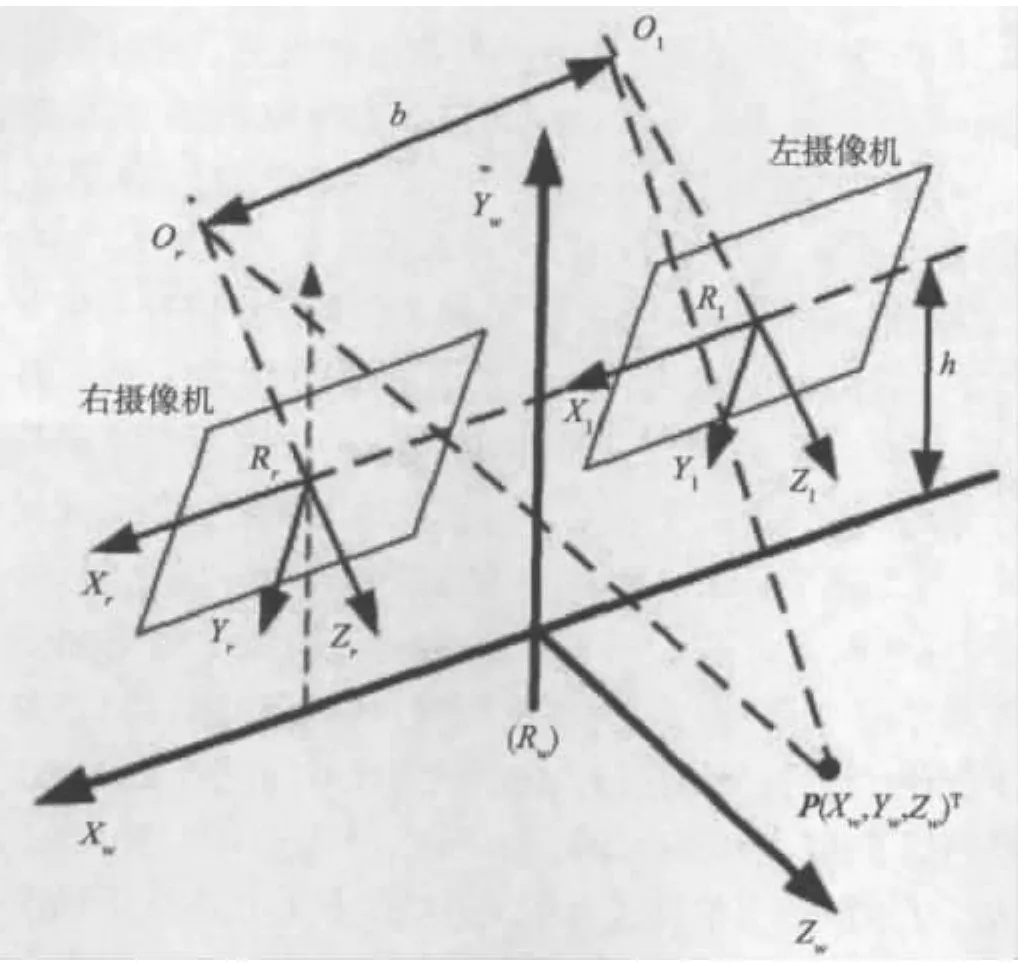
圖1 雙目視覺系統模型
2 障礙物檢測
本文的障礙物檢測方法分為計算U-視差、障礙物提取和障礙物定位三大步驟,具體實現流程圖如圖2所示。
2.1 計算U-視差
以D作為最大視差搜索范圍,采用基于區域的立體匹配方法獲得視差圖為I0(i,j,d),其中i和j分別為I0的行和列坐標,d為對應的視差值。針對視差圖I0(i,j,d)生成的U-視差圖U_I0,其行坐標表示視差級數,列坐標意義不變,U_I0的像素值U_I0(x,y)為統計視差圖中第y列具有視差為x的個數,計算式為

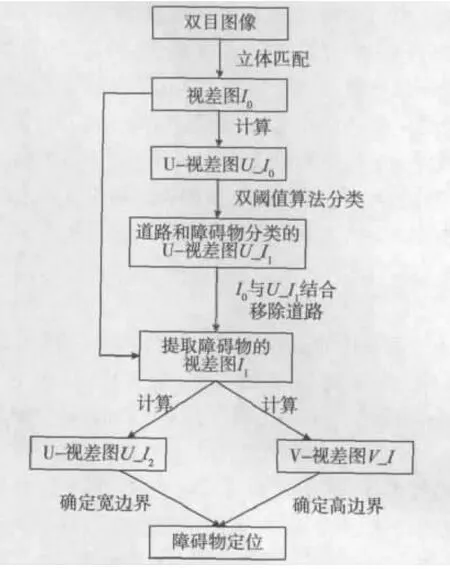
圖2 實現流程圖
式中:m為視差圖I的高度,通過上式計算得到的U_I0的寬與I0的寬相同,高為D+1。U_I0圖像的實質是將視差圖I0中與攝像機距離相同的景物的二維平面信息投影成線段。
2.2 障礙物提取
在高精度立體匹配下,垂直于道路水平面的障礙物,如前方汽車、行人、樹木等,由于其在圖像的各像素點與攝像機距離相同,則在視差圖中同列的視差值d也相同,因此其U_I0中對應部分具有較高的灰度值,而道路面像素點在同一列中的視差值分散,故投影到U_I0中對應部分的灰度值較低,因此在U_I0中設定閾值可以將障礙物和道路區域進行分割,之后在I0中提取障礙物區域。
為獲得良好的分割效果,采用雙閾值T1和T2(T1>T2)在U_I0中分割,具體算法為:掃描U_I0,若U_I0(x,y)>T1的像素點標記為障礙物類,若U_I0(x,y)<T2的像素點標記為道路類,其余像素點采用近鄰法分類,即在同行分別向左與向右搜索已標記為道路或障礙物的像素點,以距離最近作為分類標準,獲得道路與障礙物分類后的U-視差圖U_I1。在I0中提取障礙物區域的方法為:掃描U_I1,尋找標記為道路的像素U_I1(p,q),將I0中第q列中視差為p的像素值置零,獲得已提取障礙物的視差圖I1。
2.3 障礙物定位
由U-視差圖(V-視差圖)的計算原理可知,提取獲得的障礙物在U-視差圖(V-視差圖)中的寬(高)邊界即為相應橫向(縱向)線段的長度。為準確定位視差圖中的障礙物,對視差圖I1分別計算U-視差圖U_I2和V-視差圖V_I。由于存在誤匹配的影響,需設置灰度閾值提取U_I2和V_I中的有效線段,并設置距離閾值合并相應線段與舍棄干擾線段。最終定位方法是:以列為單位由左至右順序掃描V_I,若第n列存在線段,則查找U_I2中第n行中相關線段確定障礙物的數量(U_I2第n行中線段數量)、位置及相應的寬、高邊界。該方法的思想是按視差由小至大地逐步查找距離攝像機由遠及近的各障礙物。
3 實驗結果與分析
為驗證算法的有效性,對180組障礙物雙目圖像在MATLAB7.0下進行了仿真測試。硬件環境為:內存2 Gbyte,主頻 2.2 GHz,CPU 為 Intel Pentium Dual- Core T4400。實驗中獲取的視差圖大小為320×150,最大視差搜索范圍D=30。由于在障礙物提取步驟中的效果較大程度地影響檢測效果,對采用單閾值(12)與本文的雙閾值(15,10)方法在U-視差圖中提取障礙物進行了測試與統計。定義誤判率為:道路像素誤判為障礙物像素與障礙物像素誤判為道路像素的個數和占圖像總像素的比率。本文方法的誤判率降低約50%,部分圖像組的誤判率如表1所示。

表1 誤判率對比 %
選取一組雙目圖像的算法實現過程進行說明,第36組右圖及其獲取的視差圖I0、U-視差圖U_I0如圖3所示。兩種方法的誤判結果如圖4所示。由白色矩形圈出道路像素誤判為障礙物像素,白色空心圓圈出障礙物誤判為道路像素。

圖3 原圖及其視差圖、U-視差圖效果(截圖)

圖4 障礙物誤判效果對比圖(截圖)
文獻[5-7]的方法主要是通過視差圖分別計算V-視差圖和U-視差圖,采用Hough變換等直線檢測方法提取V-視差圖中的道路相關線,并將V-視差圖上檢測出的障礙物相關線投影到道路相關線上,再結合U-視差圖提取出的障礙物相關線進行障礙物進行檢測。針對汽車前方障礙物占圖像寬度比例相對較大的雙目圖像,如圖3a所示,前方除護欄、對向汽車外,樹木作為障礙物,其所處位置的寬度幾乎占滿了整幅圖像寬幅,采用文獻[5-7]的方法與本文方法對80幅類似圖像組進行了仿真實驗。以圖3a的原圖為例的2種方法檢測過程和效果對比如圖5所示,文獻[5-7]的方法在V-視差圖的道路與障礙物相關線提取效果、在U-視差圖的障礙物相關線提取效果如圖5a、圖5c所示,本文方法在移除道路視差后的V-視差圖、U-視差圖的障礙物相關線提取效果如圖5b、圖5d所示。圖5a中白色豎線為提取的障礙物相關線,而白色斜線為道路相關線,顯然,提取的道路相關線已經偏離了實際的道路范圍,從而導致后續的障礙物檢測失敗。文獻[5-7]的方法與本文方法的最終檢測效果如圖5e、圖5f所示,圖中純黑色部分為檢測出的道路,而其他部分為障礙物,誤檢測部分由白色圓圈出。實驗結果表明,在該類圖像的檢測中,文獻[5-7]的方法均出現大量的誤檢,而本文方法誤檢較少,檢測效果良好。
4 結束語
本文提出一種基于立體視覺的U-視差和V-視差的汽車前方障礙物檢測新方法。先計算U-視差提取障礙物后,再在原視差圖移除道路部分,通過計算V-視差和U-視差并結合起來實現障礙物的檢測。實驗結果表明,該方法在各種情況特別是前方障礙物占圖像寬度比例相對較大的情況下,誤檢測率低,檢測效果良好。該方法可為ADAS的障礙物分類和跟蹤任務提供參考。

圖5 檢測過程和效果對比圖(截圖)
[1] ZHAO J,WHITTYM,KATUPITIYA J.Detection of non -flatground surfaces using V -Disparity images[C]//Proc.the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems.[S.l.]:IEEE Press,2009:4584-4589.
[2] IOANNIS K,LAZAROS N,ANTONIOS G.Supervised traversability learning for robot navigation[C]//Proc.the 12th Annual Conference on Towards Autonomous Robotic Systems.[S.l.]:IEEE Press,2011:289-298.
[3]何少佳,劉子揚,史劍清.基于單目視覺的室內機器人障礙物檢測方案[J].計算機應用,2012,32(9):2556-2559.
[4]楊建榮,曲仕茹.基于單目視覺的障礙物檢測方法研究[J].計算機仿真,2009,26(2):279-281.
[5] GAO Yuan,AIXiao,RARITY J,et al.Obstacle detection with 3D camera using U-V-Disparity[C]//Proc.2011 7th International Workshop on Systems,Signal Processing and their Applications(WOSSPA).[S.l.]:IEEE Press,2011:239-242.
[6] SACH L T,ATSUTA K,HAMAMOTO K,et al.A robust road profile estimation method for low texture stereo images[C]//Proc.2009 16th IEEE International Conference on Image Processing(ICIP).[S.l.]:IEEE Press,2009:4273-4276.
[7] SOQUET N,AUBERT D,HAUTIERE N.Road segmentation supervised by an extended V-Disparity algorithm for autonomous navigation[C]//Proc.2007 IEEE Intelligent Vehicles Symposium.[S.l.]:IEEE Press,2007:160-165.
[8] SCHAUWECKER K,KLETTE R .A comparative study of two vertical road modeling techniques[C]//Proc.the 2010 International Conference on Computer Vision.[S.l.]:IEEE Press,2011:174-183.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12