無刷直流電機無位置傳感器轉子位置辨識策略
2014-11-25 09:28:44李鳳祥李天寧
電工技術學報 2014年12期
李鳳祥 徐 浩 袁 野 李天寧
(江蘇大學電氣信息工程學院 鎮江 212013)
1 引言
無刷直流電機因其高效率、長壽命、低噪聲及其良好的機械特性等優點,在航空、軍事、汽車和辦公自動化等行業得到了廣泛地應用。傳統無刷直流電機控制系統的正常運行,需要位置傳感器[1]來確定轉子相對位置。但位置傳感器增大了電機的體積和成本,維修困難,且傳感器的連線較多,容易受外界信號干擾。因此,無刷直流電機無位置傳感器控制[2-8]成為當前研究熱點之一。由于無刷直流電機的反電動勢一般難于直接檢測,因此通常采用間接方法得到反電動勢過零點[9-14]。文獻[9-13]使用端電壓法得到反電動勢過零點,這種方法雖然結構簡單,但是需要重構電機中點,濾波電路的使用也會導致檢測到的反電動勢過零點信號產生相移,需要額外的硬件或者軟件對其進行補償。文獻[14]采用三次諧波檢測反電動勢的過零點,通過虛構電阻網路中點,得到三次諧波過零點與相反電動勢過零點的關系。但實際上由于電阻網路的加入,三次諧波的波形失真。同時,對于實際的無刷直流電機,由于電機設計,漏磁[15,16]的存在,反電動勢波形平頂寬度往往小于120°。
針對以上方法的不足,本文提出了提出適用于任意平頂寬度梯形波的線反電動勢轉子位置辨識策略,以期滿足無刷直流電機無位置傳感器控制。
2 無位置傳感器控制原理
無刷直流電機主電路及等效電路如圖1 所示。
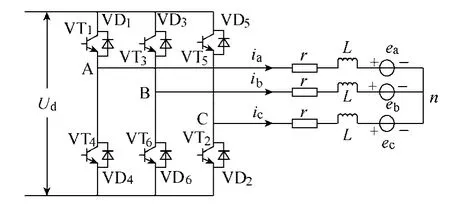
圖1 無刷直流電機主電路及等效電路Fig.1 Brushless DC motor main circuit and equivalent circuit
假設無刷直流電機三相繞組對稱,忽略齒槽效應和磁路飽和,不計渦流和磁滯損耗,不考慮電樞反應,則無刷直流電機的數學模型
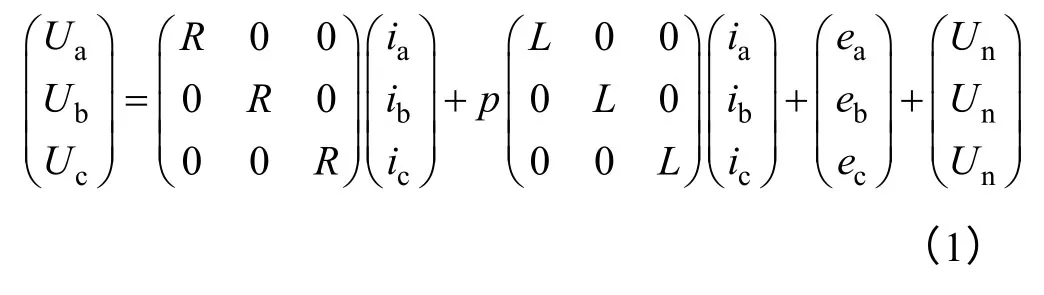
等效為
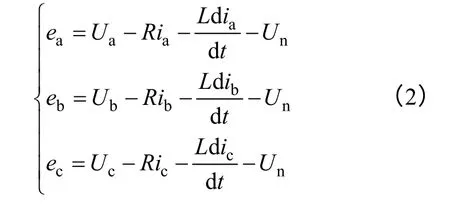
式中,Ua、Ub、Uc分別為三相繞組端電壓;R分別為三相繞組等效電阻;ia、ib、ic分別為三相繞組相電流;L為有效電感;p為微分算子;ea、eb、ec為三相繞組的反電動勢;Un電機中點電壓。
3 傳統無位置傳感器控制策略
對于反電動勢波形為 120°平頂寬度的梯形波的無刷直流電機來說,反電動勢、電流與功率器件導通關系如圖2 所示。
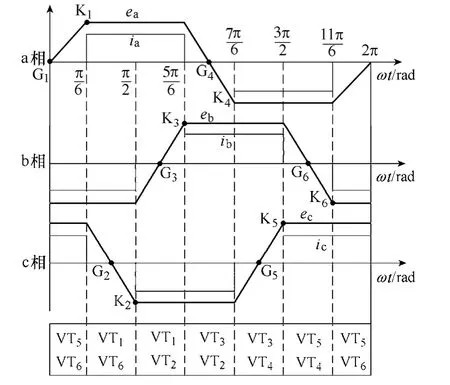
圖2 電機反電動勢,電流與功率器件導通關系Fig.2 Relationship between back-EMF,current and on-off of power device
圖2 中,G1~G6為三相反電動勢過零點,經過30°延遲后,K1~K6為換相時刻,從而實現了功率器件依次換相導通,電機正常運行。但是,該方法只是適用于反電動勢波形為平頂寬度為 120°梯形波的無刷直流電機。由于電機的設計制造工藝等問題,反電動勢波形往往不是理想的120°平頂寬度梯形波。同時,該方法需要重構有一定誤差的電機中性點和導致相反電動勢過零點檢測延遲的深度濾波電路,限制了無刷直流電機的發展應用。
3 改進的無位置傳感器控制策略
3.1 波形定性分析
參照線電壓和相電壓,現定義三相線反電動勢
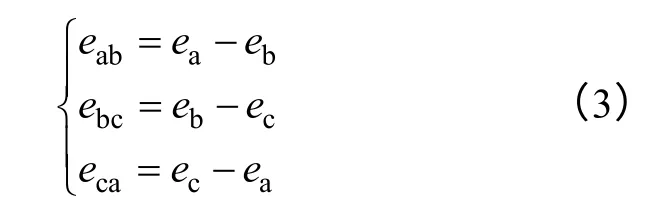
聯立式(2),可得
對于反電動勢波形為任意平頂寬度梯形波時,假設電機三相對稱,則三相梯形反電動勢波形相同,且在相位上互差120°。以a 相為例,a 相反電動勢波形如圖3 所示,反電動勢平頂寬度為π-2θ。θ=[π/6,π/2]時,平頂寬度小于120°。
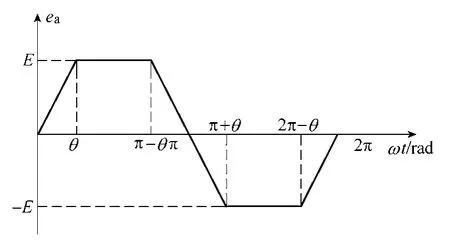
圖3 任意平頂寬度的梯形波反電動勢波形Fig.3 Arbitrary flat top width trapezoidal waveform of back-EMF
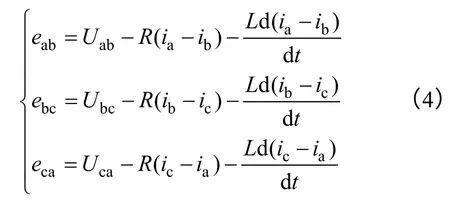
根據圖3,得到三相反電動勢的表達式
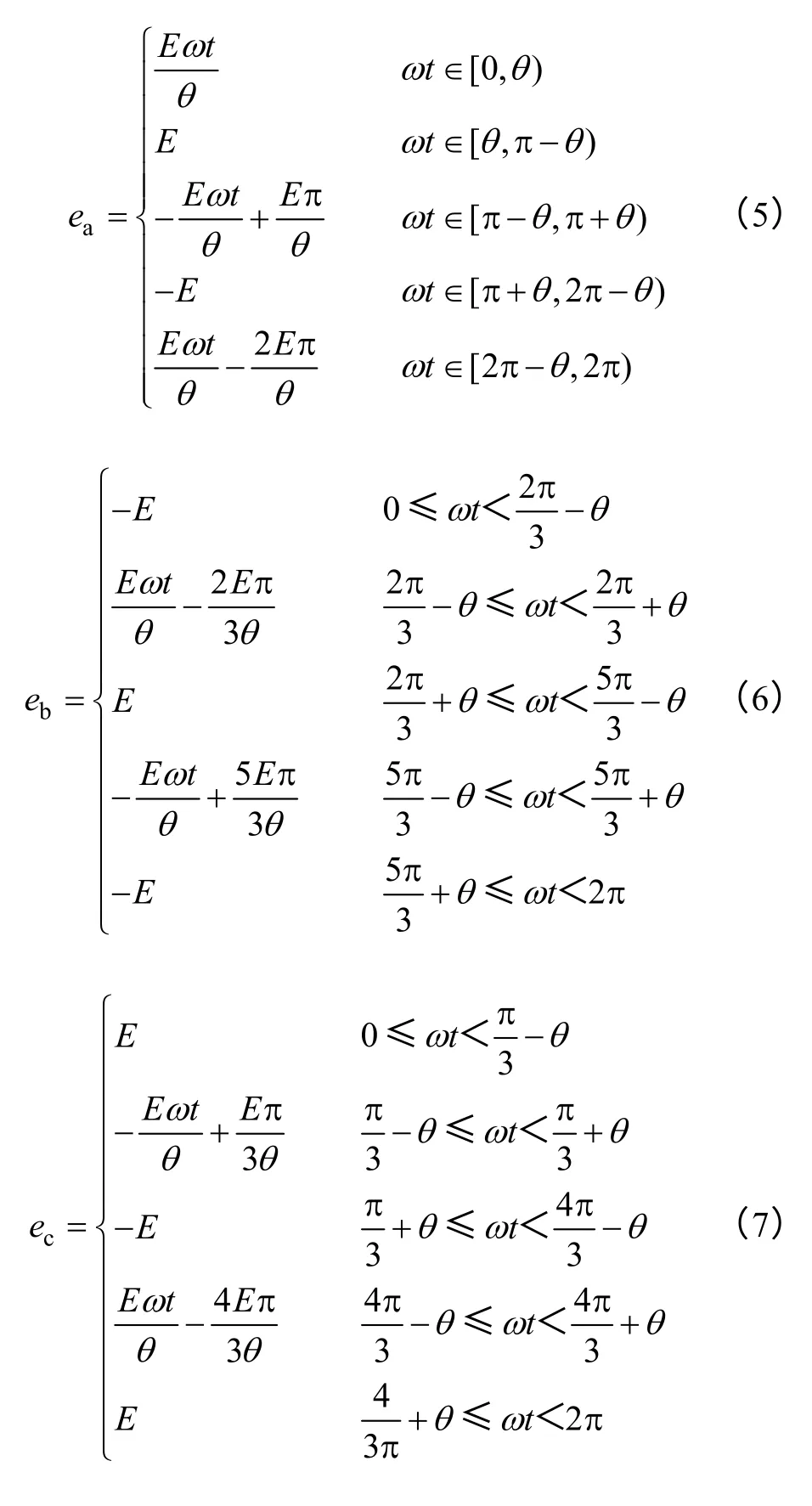
令k1=E/θ,k2=Eπ/(3θ),代入式(4),得
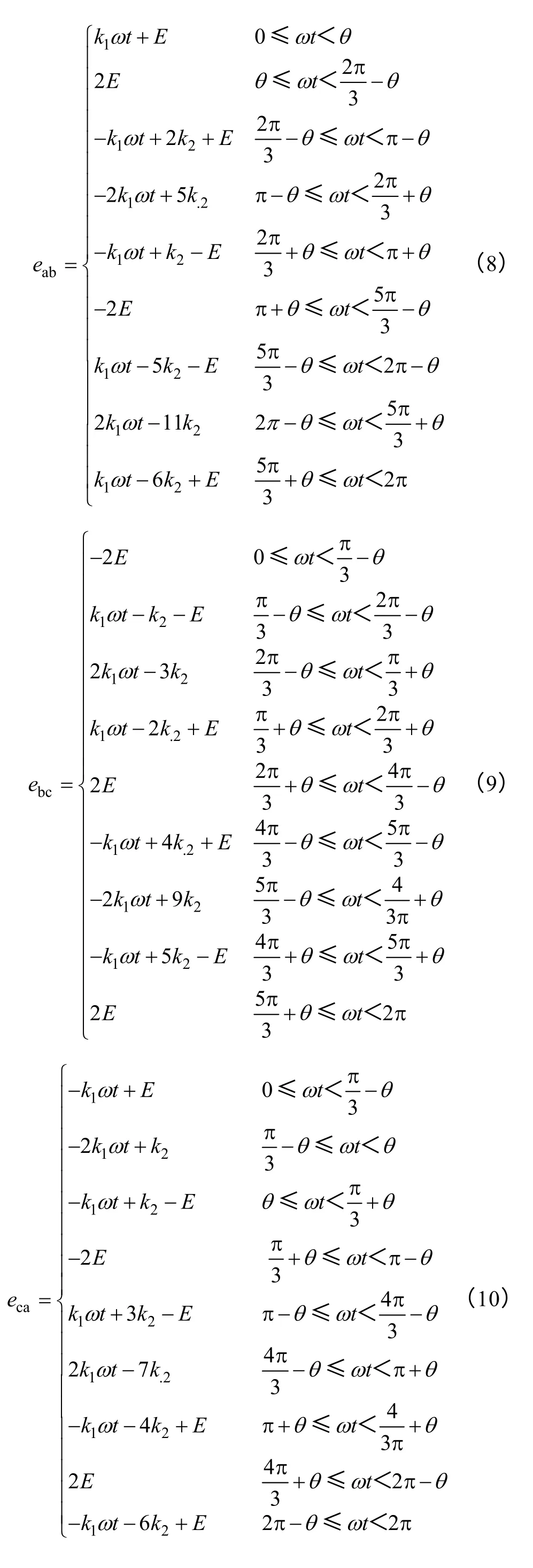
得到相應線電動勢波形如圖4 所示。
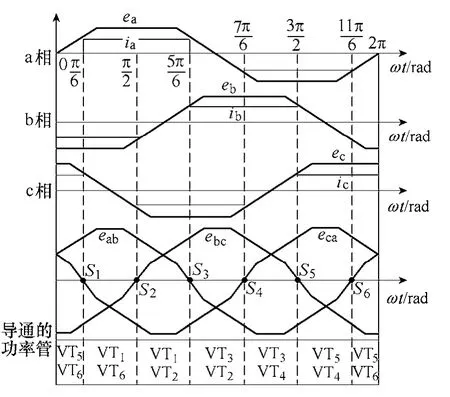
圖4 任意平頂寬度相、線反電動勢波形Fig.4 Phase and line back-EMF waveforms
對波形進行定性分析,得到結論:eab的兩個過零點時刻S3=5π/6、S6=11π/6 為實際的換相點。同理ebc、eca的過零點也是對應相的換相點。
3.2 理論證明
根據圖3 可知,相反電動勢是周期為的奇函數。根據傅里葉級數展開理論,其傅里葉級數是只含有正弦波的正弦級數
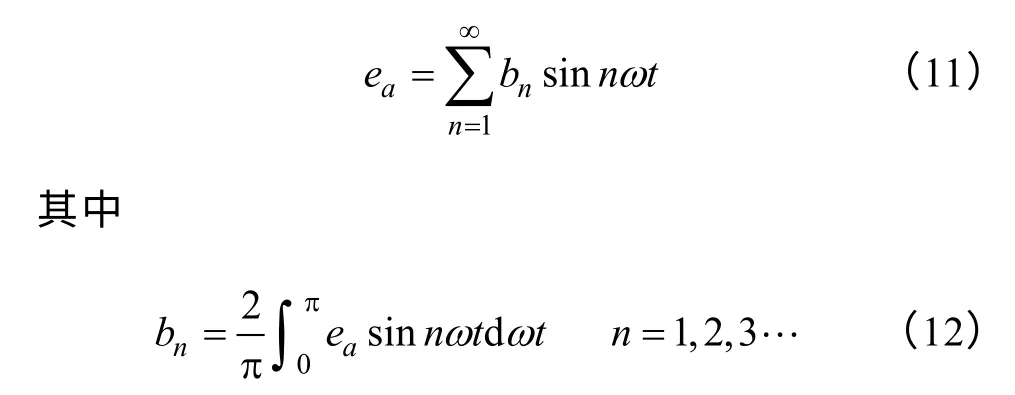
將式(5)代入(12),可以得到
令x=tω,則
當n為偶數時,bn=0
n奇數時候,
得到相反電動勢ea的傅里葉級數表達式

同理,得到b 相的反電動勢

明顯,上述表達式只包含了基波、3 次諧波和高頻奇次諧波。
結合式(15)與式(16),得到eab傅里葉表達式
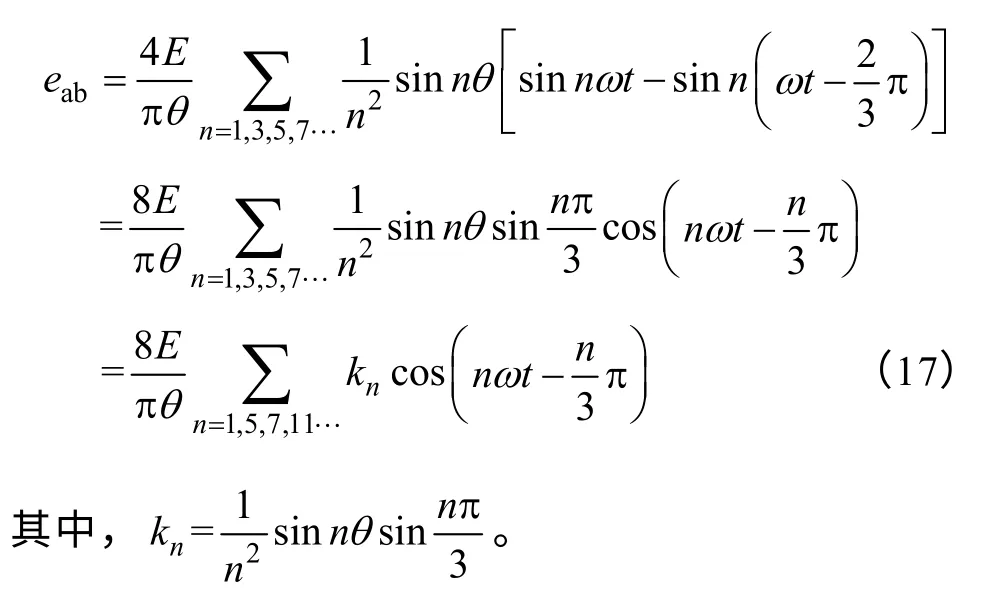
顯然,線反電動勢中也只含有基波和奇數次諧波成分,不含3n(n=1,2,3…)次諧波。同時,諧波系數kn與n成反比,n越大,kn越小。因此,忽略高次諧波,得到eab的簡化表達式為

在一個電周期內,eab的過零點為5π/6、11π/6。與波形定性分析得到的結論一致。
從而進一步證明了對于任意平頂寬度梯形相反電動勢波形的無刷直流電機,其線反電動勢過零點就是實際換相點。
4 實驗驗證
實驗平臺采用額定功率為700W,額定電壓為60V,額定轉速為600r/min 的電動車用輪轂式無刷直流電機搭建,電源采用0~100V 連續可調的直流穩壓電源。
4.1 無位置傳感器模擬霍爾波形
正確檢測轉子位置不僅可以保證無刷直流電機的正常換向,而且可以保證產生正確的速度控制量。圖5和圖6 分別為電機啟動與穩態過程中,與電機內部實際安裝的轉子位置霍爾傳感器輸出信號與采用無位置傳感器檢測方案輸出的模擬霍爾信號的對比圖。由圖5和圖6 可知,無論電機啟動還是穩態過程,無位置傳感器檢測方案輸出的轉子位置信號都能準確反映出電機轉子的實際位置,與實際物理傳感器檢測結果一致,實驗結果驗證了本文檢測方案的有效性。
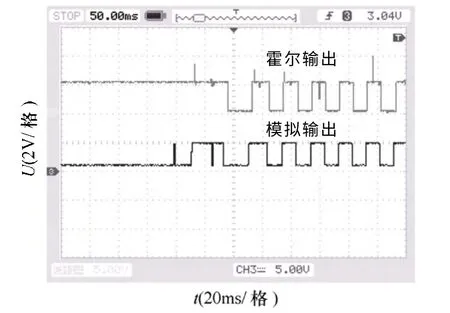
圖5 啟動過程中霍爾信號與模擬霍爾信號對比Fig.5 Comparison of actual Hall signal and analog Hall signal during the starting process
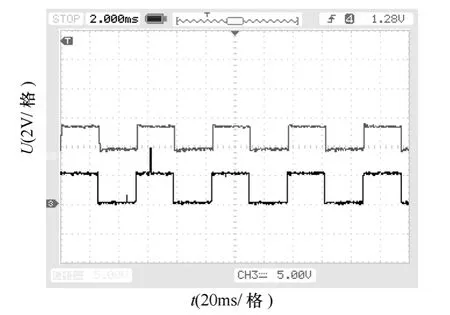
圖6 穩態過程中霍爾信號與模擬霍爾信號對比Fig.6 Comparison of actual Hall signal and analog Hall signal during the steady state process
4.2 無位置傳感器電機相電流波形
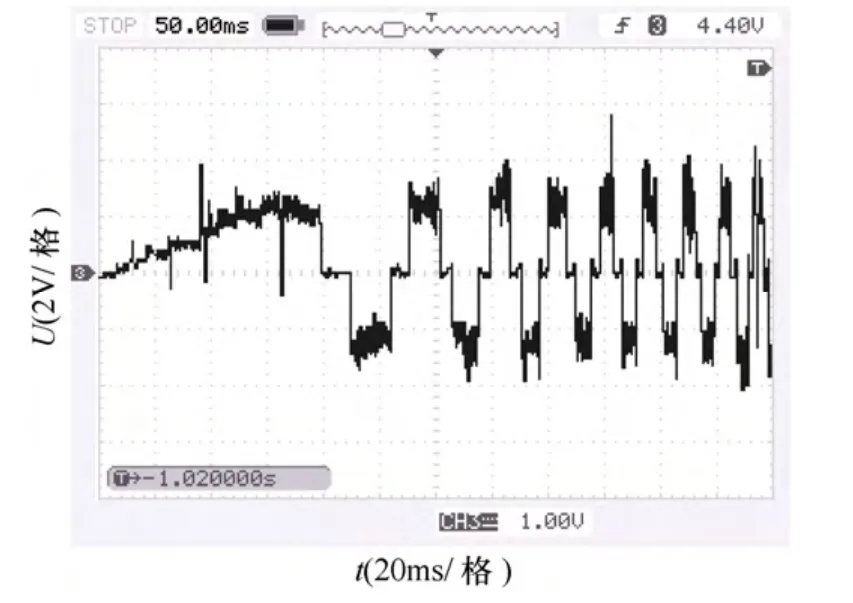
圖7 啟動過程中的相電流波形Fig.7 Waveforms of phase current during the starting process
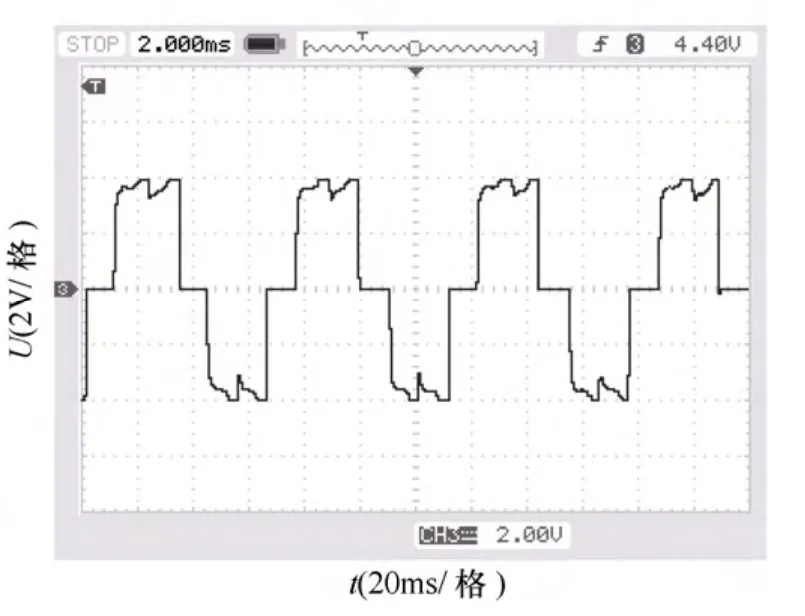
圖8 穩態下的相電流波形Fig.8 Waveforms of phase current during steady state process
圖7和圖8 為啟動過程和穩態過程下的電機相電流波形,由于無刷直流電機需要根據轉子位置確定電機電流的控制方式,從這兩個圖可以看出,電機電流波形為方波形狀,基本實現了控制目的,這也從另一個方面表明了本文提出的檢測方案適用于無刷直流電機的轉子位置檢測。
5 結論
為了降低傳統無位置控制方法的復雜性,提高確定換相時刻的精確度,提出了無刷直流電機無位置傳感器任意平頂寬度梯形波轉子位置辨識策略,通過線反電動勢波形定性分析和傅里葉級數定量推導,證明了對于任意反電動勢波形的無刷直流電機,其線反電動勢過零點就是換相點,無需重構電機中性點,無需相位補償電路。實驗驗證了方法的有效性,具有一定的理論和工程應用價值。
[1]Tae-Hyung Kim,Ehsani M.Sensorless control of the BLDC motors from near-zero to high speed[J].IEEE Transactions on Power Electronics,2004:1635-1645.
[2]譚建成.永磁無刷直流電機技術[M].北京:機械工業出版社,2011.
[3]Liu Y,Zhu Z Q,Howe D.Commutationtorque-ripple minimization in direct-torque-controlled PM brushless DC drives[J].IEEE Transactions on Industry Applications,2005,43(4):1012-1021.
[4]譚博,馬瑞卿,劉衛國.一種永磁無刷直流電動舵機四象限控制[J].電工技術學報,2011,26(9):73-79.Tan Bo,Ma Ruiqing,Liu Weiguo.Afour-quadrant control for permanent magnet brushless DC electric actuator[J].Transactions of China Electrotechnical Society,2011,26(9):73-79.
[5]Xia Changliang,Guo Chen,Shi Tingna.A neural network identifier and fuzzy controller based algorithm for dynamic decoupling control of permanent magnet spherical motor[J].IEEE Transactions on Industrial Electronics,2010,57(8):2868-2878.
[6]Xia Changliang,Li Zhiqiang,Shi Tingna.A control strategy for four-switch three-phase brushless DC motor using single current sensor[J].IEEE Transactions on Industrial Electronics,2009,56(6):2058-2066.
[7]Shi Tingna,Guo Yuntao,Song Peng,et al.A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J].IEEE Transactions on Industrial Electronics,2010,57(10):3483-3490.
[8]Qi G,Chen J T,Zhu Z Q,et al.Influence of skew and cross-coupling on flux-weakening performance of permanent-magnet brushless AC machines[J].IEEE Transactions on Magnetics,2009,45(5):2110-2117.
[9]Kim D K,Lee K W,Kwon B I.Commutation torque ripple reduction in a position sensorless brushless DC motor drive[J].IEEE Transactions on Power Electronics,2006,21(6):1762-1768.
[10]Lai Y S,Lin Y K.A unified approach to back-EMF detection for brushless DC motordrives without current and hall sensors[J].IEEE Transactions on Power Electronics,2003,18(6):1293-1298.
[11]Xia Changliang,Song Peng,Li Hongfeng,et al.Research on torque calculation method of permanentmagnet spherical motor based on the finite-element method[J].IEEE Transactions on Magnetics,2009,45(4):2015-2022.
[12]Maurisso V,Luk P C K,Alukaiday T.Sensorless control of a brushless DC motor on the ADMC330 DSP[C].Proceedings of IEE Colloquium on DSP Chips in Real Time Measurement and Control,Leicester,1997:1-5.
[13]Chen C H,Cheng M Y.Implementation of a highly reliable hybrid electric scooter drive[J].IEEE Transactions on Industrial Electronics,2007,54(5):2462-2473.
[14]Wu H X,Cheng S K,Cui S M.A controller of brushless dc motor for electric vehicle[J].IEEE Transactions on Magnetics,2005,41(1):509-513.
[15]李鳳祥,袁野.基于動態柔性變結構的控制系統優化設計[J].電子學報,2013,41(5):1025-1029.Li Feng Xiang,Yuan Ye.Optimized design of control system based on dynamic soft variable structure[J].Chinese Journal of Electronics,2013,41(5):1025-1029.
[16]李鳳祥,朱偉進.無刷直流電機雙模控制技術研究與應用[J].電機與控制學報,2013,17(3) :70-75.Li F X,Zhu W J.Research and application of dualmode operation technology of brushless DC motor[J].ElectricMachines and Control,2013,17(3):70-75.