海洋鉆采平臺管子移運機械手運動學仿真
2014-11-26 03:12:02劉樹林
機械制造 2014年1期
關鍵詞:分析
□ 王 勇 □ 劉樹林 □ 杜 偉
上海大學 機電工程與自動化學院 上海 200072
在海洋石油鉆井以及開采過程中,鉆桿、油管及套管的搬運是最為繁重的工作任務之一,為此各種管子移運裝置應運而生,最為典型的有大范圍三維空間移運機械手。該機械手涉及到力學、機械學、電器液壓技術、自動控制技術、傳感器技術和計算機技術等科學領域[1],能夠實現管子的定點移運及隨機移運,擁有自動控制及手動控制等多種方式。雖然該類型機械手已投入使用,但由于缺乏運動學理論研究,管子定點移運及自動控制模式未能得到很好地應用。
筆者分析了一種自動控制機械手,能夠實現管子從堆放處至動力貓道或者從動力貓道至堆放處的智能搬運。討論了機械手正運動學、逆運動學的求解方法,在MATLAB中建立其運動學仿真模型,驗證了機械手結構設計的合理性,并利用蒙特卡洛法求出機械手的工作空間,為后續研究奠定了理論基礎。
1 管子移運機械手結構分析
通常情況下,機械手的主要技術參數包括自由度、最大工作速度、承載能力、定位精度和重復定位精度等[2]。針對不同任務機械手的技術參數,結構設計應該各有側重。
1.1 機械手總體結構
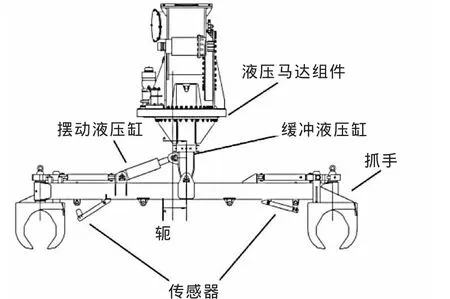
根據海洋鉆井平臺現場工作空間大,管子重量不一,直徑粗細不均、長度也不相等的特征,移運機械手采取位置與姿態分開操作的結構。位置控制部分參照液壓挖掘機等液壓工程機械,采用液壓缸驅動各機械臂來完成末端的定位。姿態部分(稱之為叉臂)具有5個自由度,可靈活抓取方向放置不同的管子。管子移運機械手總體結構見圖1,叉臂結構見圖2。
1.2 機械手結構分析
參照圖1、圖2,機械手共有9個自由度,分析如下。
(1)整個機械手外部包括旋轉平臺,控制室繞固定基座轉動,安裝的位置傳感器能實時精確地反饋旋轉位置。
(2)內部臂繞旋轉平臺上下擺動;中間臂繞內部臂上下擺動;外部臂繞中間臂上下擺動;各擺動均通過液壓缸實現,安裝的位置傳感器能實時精確地反饋各個液壓缸伸出長度。
(3)外部臂與叉臂之間的轉動,此自由度利用旋轉脈沖編碼器保持叉臂始終處于豎直狀態。
(4)軛繞豎直方向的旋轉運動,此運動通過液壓馬達實現,安裝的位置傳感器能實時精確地反饋旋轉位置。

▲圖1 管子移運機械手總體結構簡圖
▲圖2 管子移運機械手叉臂結構簡圖
(5)軛沿豎直方向的上下運動,運動通過緩沖液壓缸實現,可以緩沖機械臂對手爪的沖擊力,安裝的位置傳感器、重力傳感器能實時精確地反饋液壓缸伸出長度、下面負載的重量。
(6)軛的兩側擺動,通過擺動液壓缸實現,安裝的位置傳感器能實時精確地反饋液壓缸伸出長度。
(7)抓手的張開閉合,此運動用于抓取管子,抓手有3種規格可以方便更換,軛的下面裝有傳感器,用于探測管子。
綜上所述,管子移運機械手具有9個自由度,能夠方便、快捷地完成管子在動力貓道與存放處之間的運輸。9個自由度中,前4個自由度控制機械手終端的位置,后5個自由度控制機械手終端的姿態。液壓動力單元集中安裝于基座中,電控操作單元以及終端人機界面安裝于控制室中,各傳感器分布在執行零部件上。
2 管子移運機械手的運動學分析與仿真
機械手運動學研究是分析路徑軌跡規劃及運動控制的基礎[3],包括了正運動學分析和逆運動學分析。已知連桿參數和各個關節變量來求解指尖末端相對于給定坐標系的位置和姿態稱之為正運動學,已知機械手連桿參數和指尖末端相對于固定坐標系的位置和姿態,來求解機械手各個關節變量的大小稱之為運動學逆問題[4]。通過上節對機械手的結構分析,其末端抓手姿態主要靠傳感器得到的實時反饋信息進行調整,不需要事先進行規劃,所以對管子移運機械手的運動學分析及工作空間求解可以集中于前4個自由度,即從基座到外臂末端機械臂的運動學分析和外臂末端的工作空間求解。
2.1 機械手運動學方程建立及正運動學求解
建立機械手運動學方程常用的方法主要是標準的D-H方法和改進的D-H方法,兩種方法基本原理相同,連桿分析思想一致,但坐標系表示方法不同,前者建立的連桿坐標系位于連桿末端,后者建立的連桿坐標系位于連桿前端[5]。本文中采用標準的D-H方法,建立管子移運機械手的連桿坐標系如圖3。
根據所建立的連桿坐標系,按照標準D-H方法,確定各桿件結構參數和關節變量,見表1,表中:θ為關節角,是唯一變量;α為連桿轉角;a為連桿長度;d為連桿偏距。
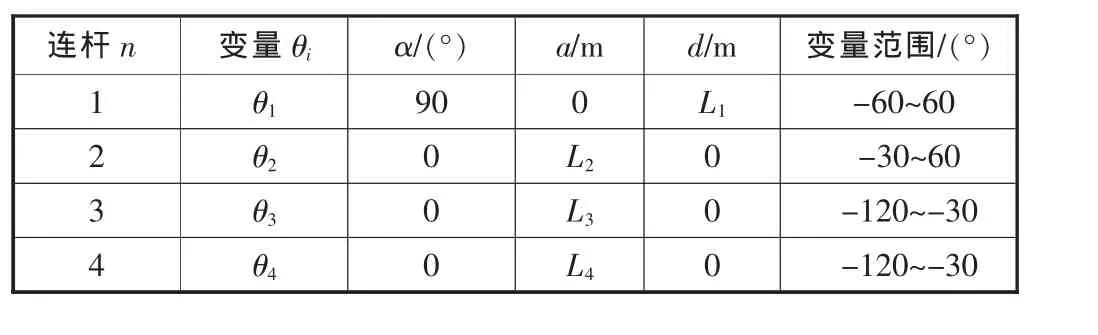
表1 機械手連桿參數和關節變量
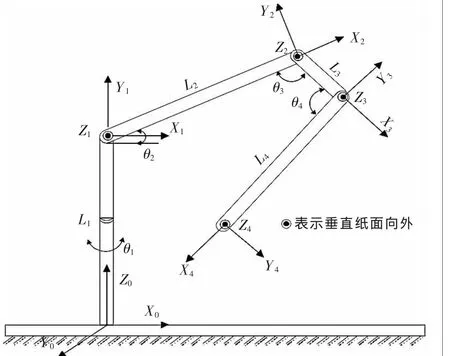
▲圖3 機械手連桿坐標系
基于表1中各參數,參照標準的D-H坐標轉換公式,得出連桿坐標變換矩陣通式為:

式中:cθn+1=cosθn+1=cn+1;sθn+1=sinθn+1=sn+1。 另 c(θ2+θ3)=cos(θ2+θ3)=c23,s(θ2+θ3)=sin(θ2+θ3)=s23,以下各式簡寫類似。
各連桿的變換矩陣相乘,得出末端坐標系相對于基坐標系的齊次變換矩陣,即正運動學方程為:


2.2 機械手逆運動學求解
機械手逆運動學求解方法主要分為數值方法和封閉解法[6],對于簡單的機械手一般用封閉解法,封閉解法又有反變換法、幾何法等。本文采用反變換法求解如下。
將式(2)兩邊同時乘A1的逆,代入az=0可得:
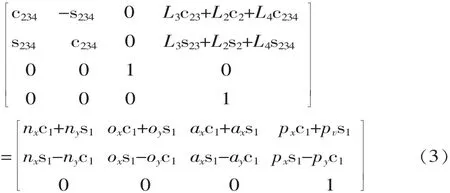
式(3)兩邊等式中第3行第4列元素相等,可得:

式(3)兩邊等式第2行第1列元素及第2行第2列元素分別相等,可得:

式(3)兩邊等式第1行第4列元素以及第2行第4列元素分別相等,可得:

整理、變換、化簡上面兩個方程,可得:

最后可得θ4:

2.3 機械手運動學MATLAB仿真驗證
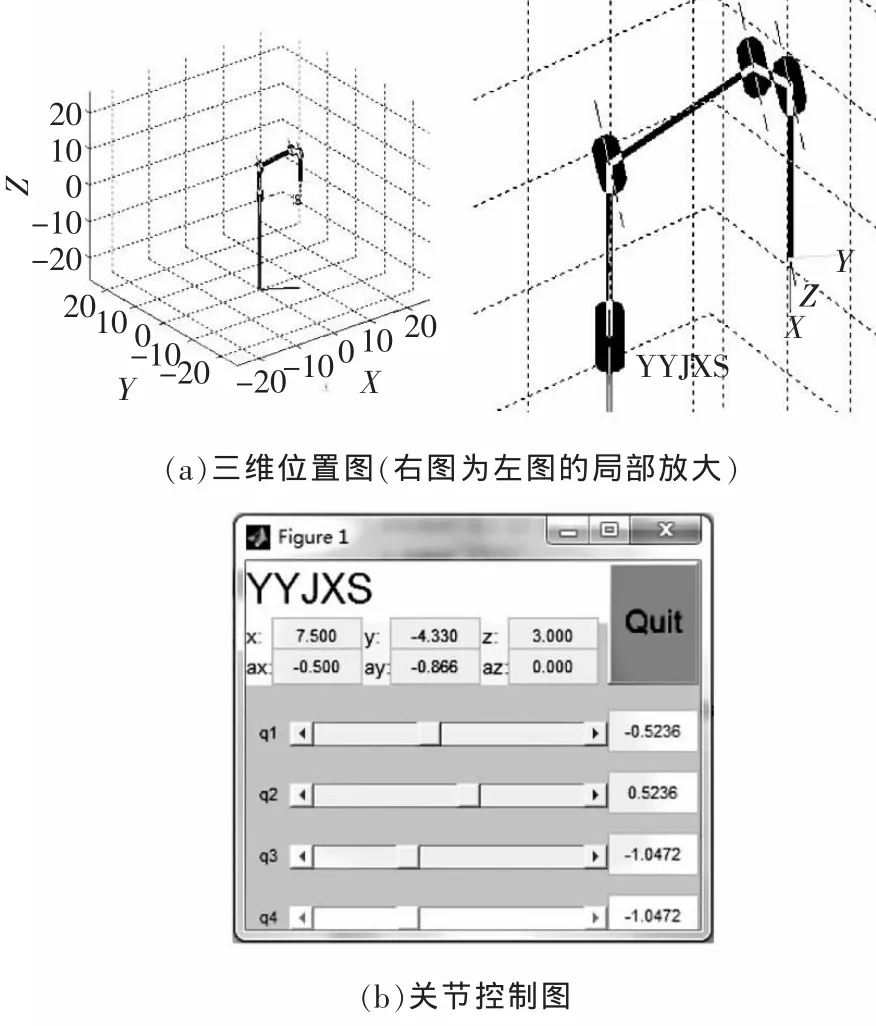
對正運動學仿真,給出結構設計參數:L1=8 m,L2=8 m,L3=2 m,L4=8 m,θ1=0°,θ2=0°,θ3=-45°,θ4=-45°。 在MATLAB程序中,為編程方便,用q表示關節角度。
(2)在MATLAB中建立機械手仿真圖,如圖4所示。
通過正運動學編程求解,得機械手末端X、Y、Z坐標 (仿真圖 4 (b) 中 x、y、z 值) 分別為:9.4142,0,-1.414 2,與幾何關系得出的結果相符,驗證了正運動學的正確性。
逆運動學仿真,重新對關節角度賦值為:

在MATLAB/ROBOTICS工具箱下,編寫逆運動學驗證程序:
q= [-pi/6 pi/6-pi/3-pi/3];
drivebot(r,q);
T=fkine(r,q)//%對關節值q求正解(末端位置)
q0=ikine(r,T)//%對末端位置求逆解(關節值)
MATLAB求解末端位置的逆解結果為:

▲圖4機械手正運動學仿真圖
▲圖5 機械手逆運動學仿真圖
q0=-0.523 6 0.523 6 -1.047 2 -1.047 2
可見,逆解結果q0與關節角度q所賦初值相等,驗證了逆運動學的正確性。仿真圖見圖5。
3 管子移運機械手末端工作空間的求解
機械手工作空間指手臂末端所能達到的空間目標的集合,代表了機械手的活動范圍,是衡量機械手工作能力一個重要的運動學指標[7]。通過對油管移運機械手的分析,關節角度θ1是作回轉運動,所以本機械手工作空間可以只求解XOZ平面,之后關節角度θ1旋轉相應角度范圍即可得到整個工作空間。
本文采用蒙特卡洛法[8]求解管子移運機械手的工作空間。蒙特卡洛法是一種借助于隨機抽樣來解決數學問題的數值方法,廣泛應用于描述某些隨機的物理現象,其具體步驟如下。
(1)求解機械手運動學正解,得到機械手末端在參考坐標系中的位置向量。
(2)在MATLAB環境下,利用 Rand()函數產生隨機數形成各關節變量的隨機值為:
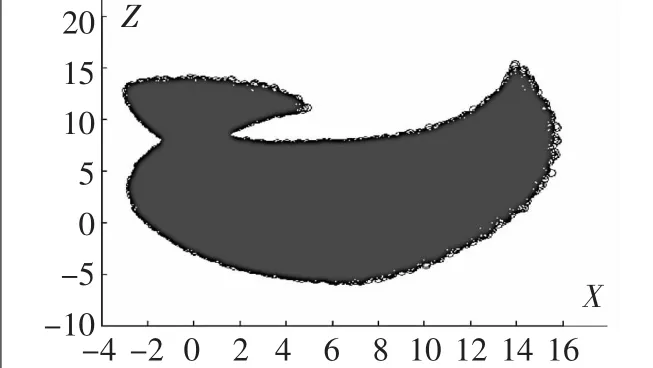
▲圖6 蒙特卡洛法末端工作空間圖
式 中 :θimin為 變量 θi轉動范圍的 最 小 值 ;θimax為變量 θi轉動范圍的最大值。
(3) 編寫算法程序,使 式 (9) 循環N次 (此處N取80 000), 得到每個關節變量的N個隨機值。
(4) 將得到的隨機值代入正運動學方程中,在MATLAB中調用繪圖命令求解末端坐標點集,結果如圖6所示。
4 結論
基于海洋平臺管子移運的特殊性,針對具有9個自由度的移運機械手結構,分析了機構的正運動學解法、逆運動學解法,并在MATLAB中仿真驗證了機構模型和解法的正確性;利用蒙特卡洛法求解了機械手末端在XOZ平面中的工作空間。一方面為進一步的軌跡規劃和控制理論打下基礎,更為重要的是對同性質機械手的設計和研究提供參照。
[1] 熊有倫.機器人學[M].北京:機械工業出版社,1993.
[2] 馬江.六自由度機械臂控制系統設計與運動學仿真[D].北京:北京工業大學,2009.
[3] 趙亮亮,馬振書,穆喜輝,等.危險作業機器人機械臂設計及其運動學分析[J].機械設計與制造,2011(8):155-157.
[4] 羅家佳,胡國清.基于 MATLAB的機器人運動仿真研究[J].廈門大學學報(自然科學版),2005,44(5):640-644.
[5] Corke P I.A Robotics Toolbox for MATLAB[J].Robotics&Automation,IEEE,1996,3(1):24-32.
[6] 劉萍,陳瑩.五自由度關節式機械手運動學分析及仿真[J].制造業自動化,2011,33(19):9-11.
[7] Rastegar J,Fardanesh B.Manipulation Workspace Analysis Using the Monte Carlo Method[J].Mechanism and Machine Theory,1990,25(2):233-239.
[8] 田海波,馬宏偉.井下排爆機器人機械臂運動學及工作空間的分析[J].礦山機械,2012,40(9):105-108.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
