太陽視日跟蹤系統的設計*
2014-11-26 03:12:18韓麗艷劉占民何海洋
機械制造 2014年8期
□ 韓麗艷 □ 宮 德 □ 劉占民 □ 何海洋
北京石油化工學院 機械工程學院 北京 102617
開發利用太陽能是解決人類能源危機和減少環境污染的有效手段之一,國內外有關機構對此均投入了大量的人力、物力進行深入廣泛的研究[1]。而研制具有實用價值的自動跟蹤系統以實現低成本利用太陽能的目的,則是促進太陽能廣泛應用的主要途徑之一。本文提供一種控制電路簡單,由步進電機驅動的低成本、實用的新型太陽跟蹤裝置。
1 工作原理
從地球上觀測者的角度看,整個天球像是在圍繞我們旋轉,其實這是地球以外的天空包括日月星辰,概無例外的以與地球運動相反的方向、但卻以相同的周期(1日)運動著,其運動的軌跡就是周日圈,天體的周日圈就是它所在的那條赤緯圈[2]。如圖1所示,天體愈近天極,其赤緯圈愈小;離天極愈遠,赤緯圈愈大。
地球公轉的周期是一年,也就是太陽沿黃道連續兩次經過春分點所需的時間,其長度為365.2422日,如圖2所示。
相對于太陽而言,地球的大小可以忽略,因此地球只是中心點的一個點,半徑大小忽略。但是觀察者直立時的方向是和其所在的地理位置密切相關的,比如在赤道上,觀察者直立方向垂直于NS(南北極);而在南北極,觀察者的直立方向就是NS線的方向。太陽相對地球的經緯度運動相當于從冬至到夏至,再從夏至返回到冬至的等速運動,如圖3所示。
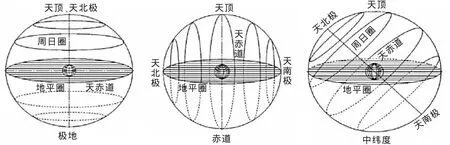
▲圖1不同緯度地區的周日運動圖
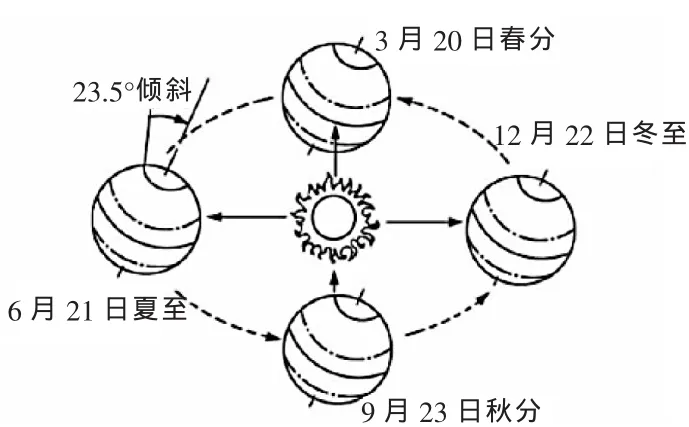
▲圖2 地球公轉周年回歸運動

▲圖3太陽位置變化圖
2 視日系統的設計
2.1 赤緯方向設計
視日太陽跟蹤系統機械部分是以凸輪為核心的減速機構,其運動簡圖如圖4所示。由赤緯齒輪及帶輪的減速機構((圖中未顯示),帶動赤緯凸輪運動,凸輪推動桿件作從冬至到夏至,再從夏至返回到冬至的等速運動,其推程為h,同時滑動機構作圓周運動。凸輪采用直動尖端推桿盤形凸輪機構,推程、回程角均為180°等速運動規律。
2.2 時角方向設計
在凸輪擺桿齒輪機構中,時角方向是由中齒輪帶動扇形齒輪作180°的擺動,扇形齒輪同時通過擺動尖端推桿與凸輪保持聯動,其運動簡圖如圖5所示,推程、回程角均為180°等速運動規律。
2.3 參數設計

▲圖4赤緯方向運動簡圖
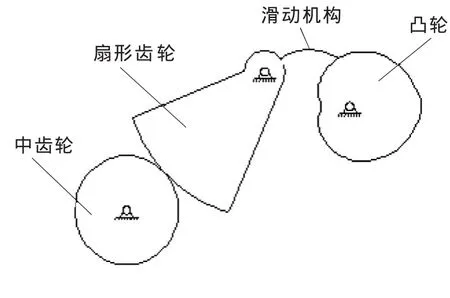
▲圖5 時角方向運動簡圖

表1 齒輪傳動參數

▲圖6 凸輪生成圖
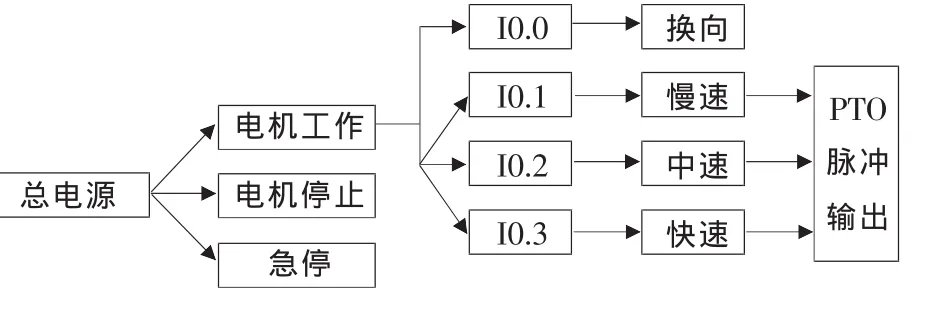
▲圖7 PLC控制程序流程圖
為了實現時角方向的實時跟蹤和赤緯方向每日跟蹤之間的耦合,按照每年 365.25 天來計算[3],視日太陽跟蹤系統機構中赤緯齒輪和凸輪擺桿齒輪的具體數據見表1。
時角凸輪和赤緯凸輪利用三維設計軟件UG編程而成,通過函數運行仿真生成凸輪輪廓曲線,再通過實體拉伸等操作設計出相應的凸輪零件,如圖6所示。
3 控制系統的軟件設計
控制系統利用PLC實現對步進電機的控制。根據步進電機的運轉特點,設計了步進電機控制算法,運用PLC控制系統,實現對步進電機在各種運行模式下加減速、正反轉及精確定位的控制仿真,利用PTO(Pulse Train Output)功能,按照給定的脈沖個數和周期輸出一串方波。控制流程圖如圖7所示。
子程序1是太陽跟蹤器正常運轉時的程序,子程序1一旦觸發,PLC將進行24 h的工作,前18 h以2.29 Hz的頻率發脈沖,后6 h以6.87 Hz的頻率發脈沖。子程序2是太陽跟蹤器中速運轉時的程序,設置的運轉時間是1 s,當子程序2被觸發,PLC將工作1 s,即面板“中速”按鈕按下時PLC工作1 s,當按鈕一直按下時,PLC則一直工作,直到按鈕彈起,脈沖初始循環時間是40 ms,頻率為25 Hz,脈沖個數為25。子程序3是太陽跟蹤器快速運轉時的程序,設置的運轉時間是1 s,當子程序3被觸發,PLC將工作1 s,即面板“快速”按鈕按下時PLC工作1 s,當按鈕一直按下時,PLC則一直工作,直到按鈕彈起,脈沖初始循環時間是10 ms,頻率為100 Hz,脈沖個數為100。搭建完成的具體電路如圖8所示。
▲圖8 控制箱
4 結論
本系統利用凸輪實現太陽視日軌跡跟蹤,其機構設計簡單、實用。整個系統實現一個驅動、兩個方向運動,不僅簡化了控制電路結構,而且降低了裝置的制作成本。對于非聚焦的太陽光伏發電系統的方向跟蹤而言,性價比高是設計制造跟蹤系統應該追求的目標。研究表明該系統可以很好地實現對太陽運動的跟蹤,可進一步為太陽能的利用提供有力支持。
[1] 李敏.一種新型的太陽能自動跟蹤裝置 [J].電子器件2008,31(5).
[2] 王炳忠.現代氣象輻射測量技術[M].北京:氣象出版社,2008.
[3] 梁 勇.太陽能高度角自動跟蹤精度的模型仿真[J]光電子技術,2008,28(3):170-173.
[4] 成大先.機械設計手冊[M].北京:化學工業出版社,2003.
[5] 倪森壽.機械基礎[M].北京:高等教育出版社,2008.
[6] 呂文華.全自動太陽跟蹤器的研制和應用[J].光學精密工程 2008,16(12).
猜你喜歡
兒童故事畫報·發現號趣味百科(2025年8期)2025-08-23 00:00:00
青少年科技創新報(2024年23期)2024-07-12 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
少年文藝·我愛寫作文(2017年6期)2017-06-12 23:21:56
商業評論(2014年9期)2015-02-28 04:32:41
