反艦導彈對編隊目標最佳瞄準點的確定方法?
2014-11-28 09:38:50徐志強
艦船電子工程 2014年8期
徐志強 朱 會
(91550部隊 大連 116023)
1 引言
艦艇編隊作戰(zhàn)是現(xiàn)代水面艦艇作戰(zhàn)的主要模式,打擊編隊目標已成為反艦導彈作戰(zhàn)使用的主要任務,為了提高其整體目標的作戰(zhàn)效能,采用目標選擇性攻擊是反艦導彈作戰(zhàn)的必要環(huán)節(jié),而利用目標間拓撲關系匹配的選擇方法又對反艦導彈大概率捕捉編隊整體目標提出更高要求[1],同時,在反艦導彈集群作戰(zhàn)模式中,指揮彈對編隊目標的整體捕捉特性及使用決策的研究也具有重要意義。目前研究較多的對單目標的捕捉模型及特性分析顯然不能滿足上述作戰(zhàn)使用需求。據(jù)此,本文研究的問題可歸為:在編隊隊形結構及目標散布、導彈自控終點散布和末制導雷達捕捉技術性能等約束條件下,如何確定導彈自導開機時刻的瞄準點位置和攻擊航向達成以最短的雷達開機時間獲得全捕目標的概率最大。首先對上述約束建立條件及決策模型,通過仿真統(tǒng)計分析對編隊目標捕捉概率的影響因素,進而得出最優(yōu)的導彈攻擊使用策略。
2 編隊隊形的描述模型
本文研究的典型目標編隊隊形有梯形、“人”字形和菱形,如圖1所示。對于其他隊形形式研究方法相似。編隊結構參數(shù)可簡化為隊列間距L和隊列夾角θt描述。基本配置為隊列間距20~35鏈,隊列夾角30°~60°。坐標系建立,以“人”字形編隊為例,瞄準點坐標系如圖2所示,以首艦T1航向為縱軸Z方向,以目標艦T2和T3連線中點為原點O,過原點與縱軸垂直方向為橫軸,由對稱性可知橫軸與T2和T3共線。假設瞄準點設為A點,導彈末制導雷達開機點M,兩點間距為自導開機距離Rzd,攻擊航向角為ωd,采用其他坐標系通過換算即可。

圖1 典型目標編隊隊形

圖2 “人”字形編隊的導彈瞄準點坐標系
其中T1、T2和T3的位置坐標:

3 末制導主動雷達搜索模型
反艦導彈捕捉概率是指導引頭開機后能夠捕捉到目標的可能性,即目標落入雷達捕捉帶內并被雷達捕捉到的概率。現(xiàn)代導彈導引頭通常只要搜索區(qū)覆蓋到目標,就能夠檢測到目標。因此,捕捉概率就等于導彈搜索區(qū)覆蓋目標的概率。由于反艦導彈的導引頭多為單平面雷達,其俯仰覆蓋概率和距離捕捉概率可近似為1,捕捉概率就近似等于導彈方位搜索區(qū)覆蓋目標的概率[2]。
如圖3所示,設雷達掃描半寬角α,掃描周期T,雷達天線轉動角速度ωl,近界和遠界分別為rmin和rmax,方向為自右向左初始方位角α0。導彈速度為vd,一個周期完成的掃描區(qū)域如圖4,在Δt時間間隔雷達掃描區(qū)域如圖5。雷達遠近界t時刻軌跡曲線:

r=rmin或rmax,α0:天線軸初始方位角。
在采樣時間Δt內,雷達覆蓋區(qū)域可用四邊形ABCD近似,A和B兩點坐標C和D兩點坐標:


圖3 雷達基本參數(shù)示意圖

圖4 雷達1T掃描范圍(陰影)

圖5 雷達在Δt時刻掃描的范圍(陰影)
4 導彈自控終點散布模型
反艦導彈自控終點誤差與自控段制導方式有關,反艦導彈可采用衛(wèi)星定位系統(tǒng)、捷聯(lián)式慣導系統(tǒng)或自動駕駛儀進行中段制導。衛(wèi)星導航系統(tǒng)的誤差通常在100m以內,對于導彈的搜捕影響很小,這里忽略不計。
對于采用慣導系統(tǒng)的導彈,主要考慮對自控終點誤差影響比較大的慣導系統(tǒng)誤差(其他誤差的影響結果,可以通過改變慣導系統(tǒng)誤差的大小對自控終點誤差產生的影響來代替),慣導誤差主要考慮積累誤差引起的導航誤差,實際自控終點的散布可以描述為正態(tài)分布:


5 編隊目標散布模型
隨著射程的增大,反艦導彈逐步趨向于采用現(xiàn)在點射擊[3,8]。采用現(xiàn)在點射擊方式的反艦導彈,依賴目標指示,計算射擊諸元時,不計算導彈自控飛行時間內目標的運動,目標方位誤差主要包括目標初始指示誤差和目標在導彈自控飛行時間內機動產生的誤差[4]。

圖6 編隊目標最大機動范圍邊界曲線
目標初始指示散布范圍位于以r為半徑的圓內,各方向上分布服從 N(0,σ2r)的正態(tài)分布。對于導彈自控飛行時間內目標機動散布,假設編隊隊形作剛體運動,即目標間幾何關系保持不變,各艦機動速度假設相同,由圖6可知,首艦在B方向上的最大機動范圍即為一次轉向后該方向上的最大極徑,因此,編隊的最大機動范圍邊界就是首艦各方向的最大極徑軌跡,編隊目標該區(qū)域內可看作為均勻分布。設轉向角速度為ωj,則邊界近似曲線極坐標方程:

因此,目標位置在導引頭開機搜索時的散布范圍,應是目標指示精度誤差位置范圍與機動范圍的疊加。
6 仿真結論及分析
仿真試驗約束條件設置如下:目標編隊為“人”字形編隊,隊列間距L=20鏈,隊列夾角θt=60°,目標艦艇的平均機動速度為vt=10m/s,目標艦旋回角速度ωj=1.5°/s,導彈的平均飛行速度為vd=300m/s,末制導達距離波門rmin=10km,rmax=40km,搜索扇面半寬α=±30°,周期T=2s,自導開機裝訂距離為rzd=30km,天線以彈橫軸自右向左掃描,目標指示精度σr=10km,試驗時間步長Δt=0.1s,開機時刻航向角采樣間隔ΔB=30°,自導距離采樣步長ΔR=1km,如圖7所示,每個網格點代表一個瞄準點,序號如圖順序排列,每攻擊航向試驗樣本1000次。仿真結果均為雷達掃描1T內的全捕捉概率。
試驗一:假設在導彈自控飛行時間tzk即編隊機動時間一定的情況下,計算不同瞄準點不同攻擊航向的捕捉概率,設tzk=30min,仿真結果如圖8所示。
試驗二:在tzk一定的情況下,以不同目標艦現(xiàn)在點為瞄準點與最優(yōu)瞄準點不同攻擊航向上的捕捉概率對比如圖9所示。
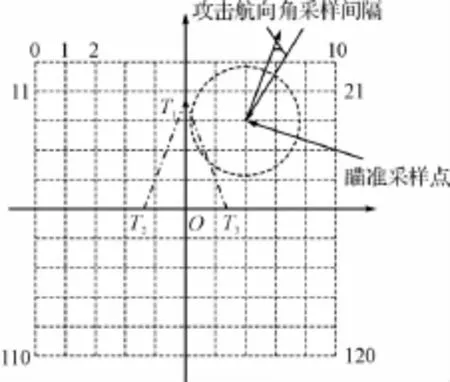
圖7 仿真試驗瞄準點采樣位置及攻擊航向設置

圖8 試驗一的仿真結果

圖9 試驗二的仿真結果
試驗三:不同隊列間距下最優(yōu)瞄準點不同攻擊航向上的捕捉概率對比如圖10所示。

圖10 試驗三的仿真結果
由試驗一仿真結果可知,最優(yōu)瞄準點的位置位于編隊三角形中心點附近,攻擊航向90°時獲得的全捕概率到達最大值約0.96,并且隨著遠離中心點的距離增大而減小;由試驗二可知,以編隊中的目標艦為現(xiàn)在點為瞄準點的全捕概率均小于最優(yōu)瞄準點的概率,而以目標2和目標3為瞄準點的捕捉概率呈現(xiàn)略微差異,其原因與雷達天線軸相對于瞄準點掃描方向有關;通過設置不同隊列間距,由試驗三可以看出,隨著間距增大,由于導致目標的機動范圍增大而使捕捉概率整體減小,同時結果表明,以目標艦為瞄準點與最優(yōu)瞄準點的捕捉概率差距也會明顯增加。
7 結語
本文在分析典型目標編隊隊形結構和其機動以及導彈自控終點散布的基礎上,結合末制導雷達搜索模型,通過試驗仿真的方法確定給定約束條件下的最佳目標及攻擊航向,試驗結果表明,對于攻擊編隊目標,不同隊形以及不同隊列參數(shù)取得的最佳目標會略有不同。大間距編隊由于機動范圍的擴大對全捕概率的影響較大。
[1]童麗,等.基于目標功能毀傷的瞄準點選取方法[J].彈箭與制導學報,2010,30(1):130-134.
[2]來慶福,等.反艦導彈雷達導引頭最佳開機距離影響因素分析[J].戰(zhàn)術導彈技術,2011(5):90-95.
[3]陳鈺寧,曾家有.采用現(xiàn)在點射擊方式的反艦導彈捕捉概率計算模型[J].海軍航空工程學院學報,2010(3):208-210.
[4]王光輝,等.超視距反艦導彈命中概率分析[J].彈箭與制導學報,2008,28(2):33-38.
[5]楊俊峰,等.陀螺隨機游走對導彈自瞄準精度的影響[J].航天控制,2012,30(5):21-24.
[6]趙晶,等.反艦導彈攻防對抗仿真系統(tǒng)[J].系統(tǒng)仿真學報,2012,24(10):2108-2112.
[7]葉利民,等.反艦導彈主從式協(xié)同攻擊樣式[J].火力與指揮控制,2012,37(9):92-94.
[8]程恭,等.基于瞄準點排布模型的多發(fā)同時彈著射擊諸元解算[J].艦船電子工程.2011,31(11):29-32.
[9]吳正龍,王大鵬.基于仿真彈群的目標毀傷預測模型[J].火力與指揮控制,2012,37(9):67-70.
[10]楊曉凌,等.傳感器/武器—目標分配問題的兩種規(guī)劃模型及求解[J].火力與指揮控制,2012,37(9):18-22.
