基于MMG和船舶領域的對遇局面自動避碰
2014-11-29 03:07:22賀益雄黃立文牟軍敏
中國航海 2014年4期
賀益雄, 黃立文, 牟軍敏
(1.武漢理工大學 航運學院, 武漢 430063; 2.內河航運技術湖北省重點實驗室, 武漢 430063)
基于MMG和船舶領域的對遇局面自動避碰
賀益雄1,2, 黃立文1,2, 牟軍敏1,2
(1.武漢理工大學 航運學院, 武漢 430063; 2.內河航運技術湖北省重點實驗室, 武漢 430063)
為研究開闊水域中船舶對遇局面下的自動避碰方案,對對遇局面中兩船會遇的不同階段進行劃分,在此基礎上進一步分析實現船舶自動避碰需對會遇局面要素進行的定義和計算。提出使用船舶三自由度MMG水動力模型和平移中心橢圓船舶領域模型理論,研究對遇局面避碰要素數值化計算模型和不同階段的自動避碰方案規劃。仿真結果表明:三自由度MMG水動力模型精度能夠滿足研究和應用要求;基于二分法的數值計算模型能可靠、快速地收斂。研究成果能為最終實現船舶對遇局面下的自動避碰奠定堅實基礎。
水路運輸;船舶領域;水動力模型;定量會遇局面要素;自動避碰;對遇局面
傳統的自動避碰研究多以來船方位、航速等決定自動避碰方案,部分以導彈制導、機器人避碰原理等確定碰撞危險度及自動避碰方案。[1-4]這些方案均未充分考慮來船航向、本船操縱性能等對避碰方案的影響及會遇不同階段中避碰方案的差異,導致自動避碰方案偏離避碰規則和海員通常做法,從而使其在航海實踐中的應用受到很大限制。根據《1972國際海上避碰規則》(以下簡稱《規則》)的內涵、外延和大眾對其公認的理解,兩船在海上以對遇態勢相遇直至發生碰撞的過程可分為多個階段[5],不同階段下船舶應采取的避碰方案是不同的。實踐中,駕駛員通常以幾何方法,按《規則》、海員通常做法和本人的知識、技能、經驗等,確定避碰方案并執行。人是智能的,可根據局面智能地判斷所處階段并決定避碰方案;與之對應的自動避碰須依賴不智能的計算機完成整個控制過程,須基于階段的準確劃分做出判斷,并生成避碰方案。因此,各對遇階段須嚴格定義,使機器判斷成為可能。同時,需要對對遇局面下的碰撞危險、緊迫局面和緊迫危險進行定量分析和計算。
從《規則》和海員通常做法出發,以基于MMG(Mathematical Model Group)水動力方程的船舶仿真模型和船舶領域理論為基礎,根據對碰撞危險、緊迫局面、緊迫危險等避碰局面要素的定義和公認理解,研究這些要素的定量計算模型;基于這些要素,對局面進行劃分,同時參照其他信息生成自動避碰方案。
1 對遇局面自動避碰建模
1.1假設
1) 水域平靜、開闊;避碰過程中不考慮減速避讓;不考慮協調避讓;來船船位、航向、航速已知。
2) 不考慮橫搖、縱搖、垂蕩影響。
1.2定義
1) 對遇局面指來船和本船在各自船首半個羅經點以內。
2) 船舶領域指船舶操縱人員意圖防止他船和靜止物標進入的船舶周圍一定范圍內的有效區域。[6-7]
3) 緊迫局面表示在該局面下,本船右滿舵轉向,來船亦將進入本船船舶領域。形成點為一時間或位置點,此時本船右滿舵轉向,來船最終與本船船舶領域邊界相切。
4) 碰撞危險滿足以下條件局面:
(1) 保向保速,來船進入本船船舶領域;
(2) 距離≤6 n mile,最終碰撞危險為不論當前是否有碰撞危險,兩船保向保速最終出現碰撞危險。
5) 緊迫危險表示該局面下,本船右滿舵轉向,兩船亦將碰撞。形成點為本船滿舵向右轉向,兩船不碰撞的最后時間點。碰撞的含義定為兩船重心距離小于兩船船長之和的1/2。
1.3船舶會遇局面分析
兩船海上相遇至發生碰撞可分為多個階段[1]:
1) 碰撞危險未形成之前的自由行動階段。
2) 碰撞危險至緊迫局面形成階段。
3) 緊迫局面至緊迫危險形成階段。
4) 緊迫危險至碰撞發生階段。
2 避碰局面要素定量計算建模
2.1坐標系
所采用的坐標系見圖1:
1) 大地固定坐標系XOY,Y軸正向指向正北,X軸正向指向正東,方向向右為正。
2) 隨船移動坐標系xOy,y軸正向指向船頭,x軸正向指向右舷,方向向右為正。
兩坐標系的夾角為本船航向TC,與物標方位TB和舷角Q存在以下關系
TB=Q+TC
(1)
坐標轉換關系
[X,Y]=[x,y]·A+[X0,Y0]
(2)

圖1 坐標系示意圖
從模擬仿真的過程來看,這種坐標系更符合航海習慣,與其他坐標系相比具有較明顯的優勢。
2.2船舶領域模型
[7-10],船舶領域模型采用偏移中心橢圓船舶領域模型(見圖2)。
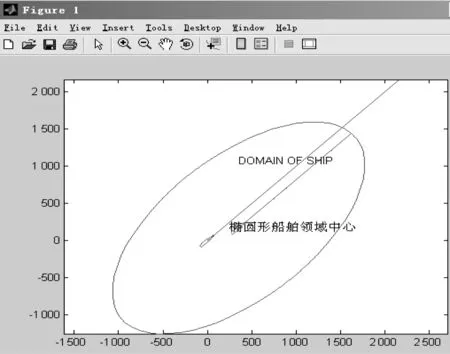
圖2 偏移中心的橢圓船舶領域
船舶領域橢圓圓心為虛擬船位置,實際船位位于虛擬船位左后方。船舶領域的長軸長、短軸長、實際船位相對于船舶領域橢圓圓心的偏移量等參數可根據船舶特點、航行環境的不同等適當選取。研究中,模擬對象為一艘7.6萬噸級滿載散貨船,在開闊水域中長軸a=8L,短軸b=4L,L為船長,中心偏移方向199°。偏移量為橢圓圓心沿實際船位方向到邊界距離的1/4。
2.3船舶運動模型
基于分離模型(MMG)思想的船舶六自由度動力學方程已使用多年。[11-12]船舶避碰過程中縱搖、垂蕩、橫搖運動的研究意義不大,只需研究靜水中縱向、橫向和首搖3個方向的運動。靜水中船舶三自由度動力學方程為
(3)
式(3)中符號的含義見文獻[11-12]。船位坐標計算基于上述模型,選用龍格-庫塔方法。
2.4避碰要素定量計算模型
若來船與本船構成碰撞危險,則必有緊迫局面形成點;若來船dCPA小于兩船船長之和的1/2,有緊迫危險形成點。可計算緊迫局面形成點和緊迫危險形成點。
2.4.1緊迫局面形成點
(4)
Dis=f(t,tm)函數具體表達式為
(5)
(6)
若t≤tm,則

(7)
式(4)~式(7)中:上標t代表時刻;下標0代表本船;下標R代表來船;v代表速度;TC代表航向;(x,y)和(XR,YR)為本船、船舶領域中心、來船位置;rt為t時刻船舶領域橢圓橢圓心沿來船方向半徑長;Rlingyu為船舶領域橢圓中心沿實際船位方向半徑長;Qt為t時刻船舶領域中心看來船舷角。
rt=ab/((asin(Qt))2+(bcos(Qt))2)0.5
(8)
Rlingyu=r(Q=199)=ab/((asin(199))2+
(bcos(199))2)0.5
(9)
從問題物理意義來看,Dis=f(t,tm)具有以下性質:

2) 若來船相距較遠,不操舵來船最終進入本船船舶領域,有min(f(t,0))gt;0,min(f(t,tCPA))lt;0。

2.4.2緊迫危險形成點
同求取緊迫局面形成點的數學模型,將船舶領域改成以本船重心為圓心、半徑為兩船船長之和的1/2的圓形區域。
3 仿真計算
3.1仿真數字船舶模型
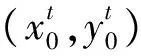
以“2.2”中的船舶為模擬對象,使用MATLAB編程查驗船舶數字模型的準確性,分別對不同轉速下的航速和全速滿舵旋回進行比較(見表1和圖3)。

表1 MMG模型與實船航速性能比較
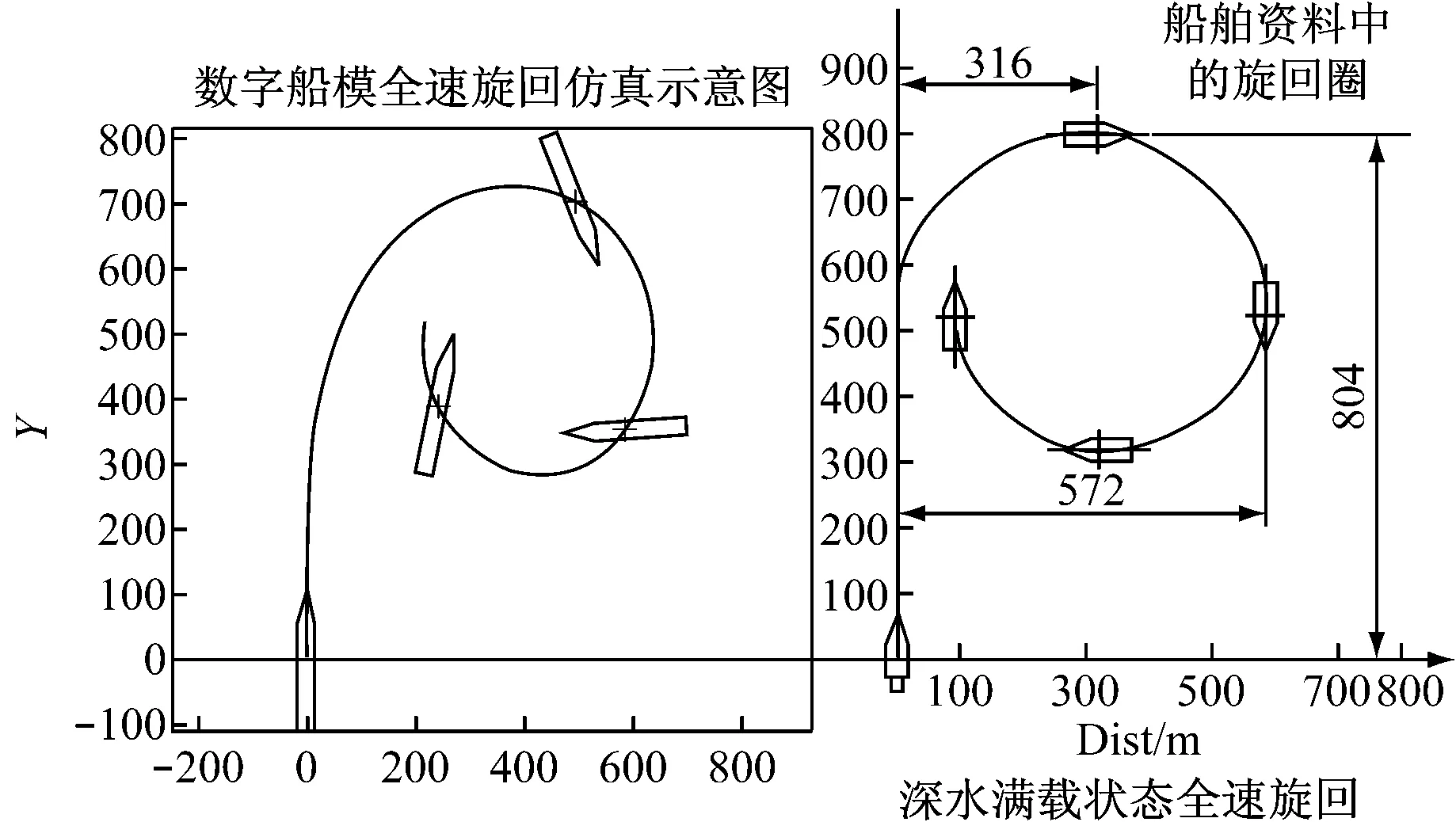
圖3 模型和實船旋回性能比較示意圖
結果表明,通過調整各種系數,船舶數字模型的船速性能和旋回性能與實船很接近。
3.2緊迫局面、緊迫危險形成點計算流程
使用二分法的緊迫局面、緊迫危險形成點定量模型計算流程見圖4。
按以下初始條件仿真:來船船長200 m,方位045°,距離5.6 n mile,航速12 kn,航向225°,本船初始航速13 kn,航向045°。進行仿真模擬的輸出結果為4 094 m/629 s后形成緊迫局面;4 615 m/710 s后構成緊迫危險。
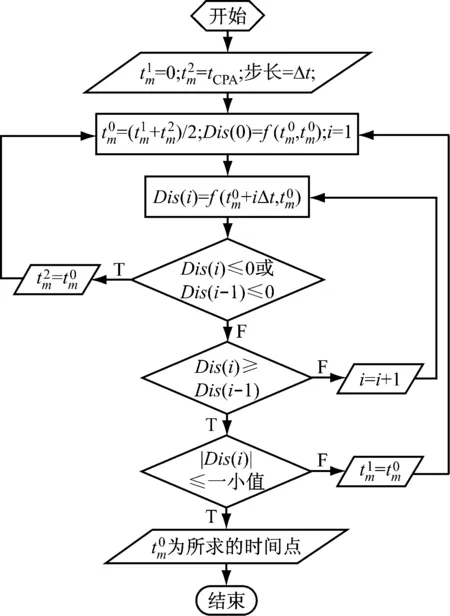
圖4 緊迫局面、緊迫危險形成點定量計算流程
4 對遇局面避碰方案選擇
按照對遇局面要素定義和數值解法確定的時間點將對遇局面劃分為不同階段,應采取的避讓措施分析如下。
若最終無碰撞危險,無須采取行動。否則:
1.碰撞危險未形成(階段1)。可及早、自由地采取避讓行動(向左、右均可)。
2.碰撞危險已形成,未構成緊迫局面(階段2)。采取向右轉向措施可確保在安全距離外駛過,程序中應按照《規則》第14條規定向右轉向。
3.緊迫局面已經形成,緊迫危險尚未形成(階段3)。此時不背離《規則》(最大幅度為右滿舵)已不能安全通過,應按照《規則》第2條“責任條款”采取行動;如背離《規則》(最大幅度為左滿舵)能夠安全通過,則應背離《規則》向左轉向避讓。
如向左轉向也不能安全通過,根據對遇局面的特殊情況,可比較本船航向C0與來船的航向C1、本船的方位TB0與他船看本船的方位TB1:
1) 若TB0≤C0且TB1≤C1,應大幅度右轉。
2) 若TB0gt;C0且TB1gt;C1,應查驗對方無轉向動作后背離《規則》采取行動,及早大幅度左轉。
3) 若TB0gt;C0且TB1≤C1,應大幅度右轉。
4) 若TB0≤C0且TB1gt;C1,應通過比較兩種方式避讓時他船距船舶領域最近距離的大小確定向哪舷避讓。
4.緊迫危險已經形成(階段4)。應采取最有助于避免碰撞的行動,可通過比較向左和向右旋回避讓時最近距離的大小決定向哪舷避讓。
5 結 語
使用船舶三自由度MMG水動力模型和平移中心橢圓船舶領域模型理論,研究了對遇局面避碰要素數值化計算模型和不同階段的自動避碰方案規劃。仿真結果表明,采用的數學模型可靠,二分法算法能快速、可靠收斂;精度可滿足自動避碰研究和實踐要求。研究成果可產生對遇局面下船舶各個階段符合避碰規則和海員通常做法的避碰方案。結合轉向模型、復航模型,可生成各個時間點的可能避讓方案;對所有方案進行最優化選擇,可最終確定符合避碰規則和海員通常做法的最優化自動避碰方案。
參考文獻
[1] 鄭中義.船舶自動避碰決策系統的研究[D].大連:大連海事大學,2000.
[2] 陳錦標,王則勝.多船自動避碰決策探討[J].南通航運職業技術學院學報,2005,4(3):52-54.
[3] TSOU Mingcheng, HSUEH Chaokuang. The Study Of Ship Collision Avoidance Route Planning By Ant Colony Algorithm[J].Journal of Marine Science and Technology, 18(5): 746-756.
[4] 周偉. 寬水域船舶智能避碰決策算法驗證及優化[D].廈門:集美大學,2011.
[5] A.N.科克羅夫特,J.N.F.拉梅杰.海上避碰規則指南[M].4版.大連:大連海運學院出版社,1992:132-134.
[6] GOODWIN, E M.A Statistical Study of Ship Domains. [J].Journal of Navigation, 1971,28:328.
[7] DAVIS P V, DOVE M J, STOCKEL C T. A Computer Simulation of Marine Traffic Using Domains and Arenas [J].Journal of Navigation, 1980, 33: 215-222.
[8] FUJI I Y, TANAKA K. Traffic Capacity [J]. Journal of Navigation, 1971, 24: 543-552.
[9] 齊樂,鄭中義,李國平. 互見中基于AIS數據的船舶領域[J].大連海事大學學報, 2011,37(1):48-50.
[10] SZLAPCZYNSKI R.Solving Multi-Ship Encounter Situations by Evolutionary Sets of Cooperating Trajectories [J].TRANSNAV, 2010,4(2):13-15.
[11] 李文魁,陳永冰,田蔚風,等.基于MATLAB的船舶運動控制實時仿真研究 [J].系統仿真學報,2007,19(19):4424-4427.
[12] YAVIN Y,FRANGOS C.Computation of Feasible Control Trajectories for the Navigation of a Ship Around an Obstacle in the Presence of a Sea Current[J].Mathl.Comput.Modelling, 1995,21(3):99-117.
AutomaticCollisionAvoidanceforShipsApproachingHead-OnwithMMGandShipDomain
HEYixiong1,2,HUANGLiwen1,2,MOUJunmin1,2
(1. School of Navigation, Wuhan University of Technology, Wuhan 430063, China; 2. Hubei Inland Shipping Technology Key Laboratory, Wuhan 430063, China)
The automatic collision avoidance decision-making for ships approaching each other head-on is studied. Encounter situation changes with the distance between ships so the process of approaching is divided into stages when processing. The elements describing encounter situation are defined. The elements are quantitatively determined according to the MMG three-degree-of-freedom hydrodynamic model of the ships and the theory that a ship needs an elliptical domain. The maneuver plan for each stage of approaching is worked out. Simulations prove that the hydrodynamic model is accurate enough for this application and the computing model based on the method of bisection is good for its rapid convergence and reliability. The research may advance the development of automatic collision avoidance equipment.
waterway transportation; ship domain; hydrodynamic model; quantitative elements of encounter situation; automatical collision avoidance; approaching head-on
2014-07-28
湖北省自然科學基金(2014CFB878)
賀益雄(1976—),男,湖南新邵人,副教授,船長,博士生,研究方向為船舶自動避碰、船舶與海洋環境保護。
E-mail:heyixiong7@sina.com
1000-4653(2014)04-0092-04
U676.1
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
船舶(2021年4期)2021-09-07 17:32:22
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
