基于Quest 3D 的LNG 船虛擬訓(xùn)練系統(tǒng)開發(fā)
2014-11-29 01:58:56上海海事大學(xué)商船學(xué)院李志球胡以懷欒泳立
世界海運(yùn) 2014年11期
上海海事大學(xué)商船學(xué)院 李志球 胡以懷 欒泳立
據(jù)2013年中國海洋工程服務(wù)及油氣儲(chǔ)運(yùn)技術(shù)發(fā)展論壇預(yù)測,為滿足進(jìn)口LNG 海運(yùn)需求,2020年后,我國LNG運(yùn)輸所需船隊(duì)規(guī)模將擴(kuò)大到60~100 艘,這將大大增加我國LNG 船員的需求量。而目前我國LNG 船員大多被派往國外接受培訓(xùn),培訓(xùn)時(shí)間長、成本高。因此,如何在短時(shí)間培養(yǎng)出擁有過硬專業(yè)素質(zhì)的LNG 船員,是影響中國LNG航運(yùn)事業(yè)又好又快發(fā)展的一個(gè)關(guān)鍵因素。
實(shí)踐證明,讓船員到實(shí)船學(xué)習(xí)是培養(yǎng)LNG 船員最好的途徑,但由于培訓(xùn)人數(shù)多、實(shí)船有定員、船期以及安全等多方面因素的限制,能夠上實(shí)船學(xué)習(xí)的人非常有限。大部分學(xué)員在傳統(tǒng)方式學(xué)習(xí)的過程中不能形成對(duì)LNG 船舶整體構(gòu)造的清晰認(rèn)識(shí)。LNG 船舶模擬器的使用可以提高船員培訓(xùn)效果,使船員熟悉工作原理、設(shè)備和操作程序,增加他們的經(jīng)驗(yàn)和自信心,為以后在實(shí)船工作打下堅(jiān)實(shí)的基礎(chǔ)[1]。
以Quest 3D 為虛擬引擎的虛擬現(xiàn)實(shí)技術(shù)可用于LNG船舶模擬器的開發(fā)。虛擬現(xiàn)實(shí)技術(shù)具有多感知、沉浸感、交互性等優(yōu)越特征,能使學(xué)員有著聽覺、視覺、觸覺等多種體驗(yàn),達(dá)到身臨其境的效果,同時(shí)交互性以及協(xié)同操作等功能可使船員對(duì)LNG 船舶操作有著更進(jìn)一步的認(rèn)識(shí)和了解。LNG 船舶虛擬訓(xùn)練系統(tǒng)的開發(fā)過程并不復(fù)雜,并且可以隨設(shè)備的發(fā)展而更新,這樣可大大減少教學(xué)和評(píng)估的成本[2]。
一、LNG 船虛擬訓(xùn)練系統(tǒng)的開發(fā)流程及總體功能設(shè)計(jì)
目前,虛擬現(xiàn)實(shí)軟件有很多,主要包括Virtools、VR-Platform、Vega、Quest 3D 等,不同的軟件應(yīng)用于不同的領(lǐng)域。由于Quest 3D 具有成熟的DirectX 引擎,比其他虛擬現(xiàn)實(shí)開發(fā)軟件具有更好的圖形渲染效果,并且在實(shí)現(xiàn)交互的編程方面提供了信道(channel)這一人性化的方式,容易上手操作,因此,選擇Quest 3D 作為LNG虛擬訓(xùn)練系統(tǒng)的開發(fā)平臺(tái)[3]。
(一)LNG船虛擬訓(xùn)練系統(tǒng)開發(fā)流程
LNG船舶虛擬訓(xùn)練系統(tǒng)的開發(fā)過程主要包括四個(gè)階段,其具體開發(fā)流程如圖1 所示:
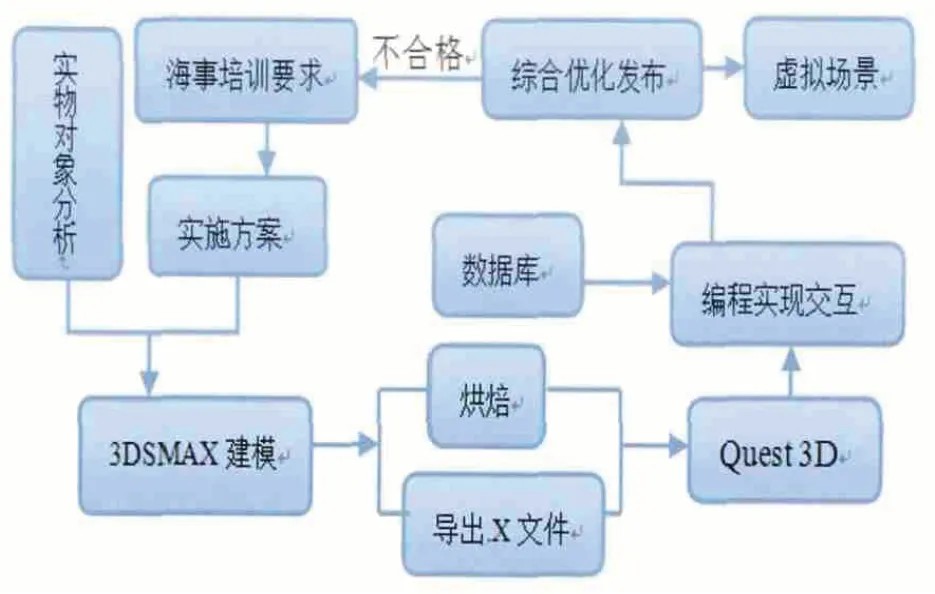
圖1 開發(fā)流程圖
1.前期準(zhǔn)備階段:在進(jìn)行開發(fā)之前,基于STCW 公約以及我國主管機(jī)關(guān)規(guī)定的關(guān)于LNG 船舶模擬器相關(guān)規(guī)定制定產(chǎn)品方案。同時(shí),對(duì)實(shí)船進(jìn)行素材采集、分析對(duì)象外觀特征以及確定對(duì)象動(dòng)作真實(shí)順序。
2.建模階段:根據(jù)產(chǎn)品方案,利用3D MAX 完成三維建模和虛擬場景的構(gòu)造。在建模的過程中,既要滿足視覺要求即真實(shí)感,又要適當(dāng)減少模型的紋理精度、細(xì)節(jié)來保證系統(tǒng)的運(yùn)行效率。
3.Quest 3D 平臺(tái)開發(fā)階段:將模型導(dǎo)入到Quest 3D中,利用該軟件DirectX 引擎編程優(yōu)化,最終實(shí)現(xiàn)內(nèi)部動(dòng)作以及和外界的交互功能。
4.產(chǎn)品的發(fā)布階段:將編好的程序發(fā)布成需要的類型,并檢驗(yàn)是否符合海事培訓(xùn)要求。
(二)系統(tǒng)總體功能設(shè)計(jì)
LNG 船虛擬訓(xùn)練系統(tǒng)包括船舶漫游、船舶設(shè)備虛擬拆裝、協(xié)同操作三方面內(nèi)容。如圖2 所示,系統(tǒng)主要功能如下:速度(Speed)、重力(Gravity Value)、相機(jī)碰撞尺寸(In: Collision Spheroid Radius)等等。漫游時(shí),由于相機(jī)的視角會(huì)隨著鼠標(biāo)的光標(biāo)轉(zhuǎn)動(dòng),若想以固定視角觀察時(shí)則很不方便,此時(shí)可以通過更改Rotation Vector 下的設(shè)置實(shí)現(xiàn)固定視角,在Mouse dX/dY 模塊上添加一個(gè)Channel Switch,再添加一個(gè)可以控制Value 值的命令。通過改變Value 值,實(shí)現(xiàn)相機(jī)視角轉(zhuǎn)動(dòng)和固定之間的轉(zhuǎn)換。系統(tǒng)漫游如圖3 所示:
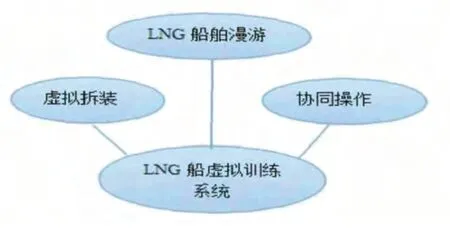
圖2 系統(tǒng)總體功能圖
LNG 船舶漫游功能:該功能能夠讓船員自由行走在虛擬船舶的任何位置,同時(shí)沉浸式虛擬現(xiàn)實(shí)設(shè)備(比如三維立體眼鏡、數(shù)據(jù)手套)的使用也讓船員達(dá)到身臨其境的效果,這些功能促使船員更快熟悉LNG 船管道分布走向、設(shè)備的布置以及相關(guān)專業(yè)操作。
船舶設(shè)備虛擬拆裝功能:該部分嚴(yán)格按照拆裝大綱要求進(jìn)行設(shè)置,使拆裝過程達(dá)到規(guī)范。在選擇虛擬設(shè)備拆裝后,系統(tǒng)會(huì)自動(dòng)進(jìn)入拆裝界面。該部分包含拆裝視頻演示、拆裝練習(xí)和拆裝評(píng)估考試等內(nèi)容。如圖3 所示,操作者可以根據(jù)需要選擇不同的功能,同時(shí)數(shù)據(jù)庫的連接可以對(duì)每一次練習(xí)和評(píng)估的成績進(jìn)行記錄保存,通過查看功能可以查看操作步驟,包括正確和錯(cuò)誤的操作。
協(xié)同操作功能:系統(tǒng)不僅可以單機(jī)使用,也可利用服務(wù)器實(shí)現(xiàn)多人在線,進(jìn)行船舶不同崗位的角色選擇,通過創(chuàng)建LNG 船舶不同情境來實(shí)現(xiàn)對(duì)LNG 貨物操作、應(yīng)急設(shè)備操作、消防演習(xí)以及機(jī)械故障的處理等多項(xiàng)主要船舶操作的練習(xí)和考核。培訓(xùn)人員可以直觀地體驗(yàn)由于自己的操作所造成的結(jié)果或引發(fā)的事故現(xiàn)象,真實(shí)感相較傳統(tǒng)訓(xùn)練得到了極大的增強(qiáng)。
二、系統(tǒng)開發(fā)關(guān)鍵問題
(一)場景漫游
場景的漫游主要是利用漫游相機(jī)實(shí)現(xiàn)的。可以選擇1 person walkthrough camera(第一人稱漫游相機(jī))或者3 person walkthrough camera(第三人稱漫游相機(jī))。在具有角色選擇時(shí)一般選擇第三人稱行走相機(jī)。漫游相機(jī)參數(shù)的設(shè)定是影響漫游效果的最主要的因素,因此,為了使漫游達(dá)到最舒服的狀態(tài),應(yīng)注意調(diào)節(jié)一些漫游的參數(shù),如

圖3 系統(tǒng)漫游圖
(二)虛擬拆裝
1.碰撞檢測
碰撞檢測是系統(tǒng)中不可缺少的部分。要對(duì)進(jìn)行場景漫游的相機(jī)設(shè)置碰撞,防止相機(jī)穿過設(shè)備。在船舶設(shè)備虛擬拆裝部分,由于設(shè)備每個(gè)零件都是獨(dú)立又相互關(guān)聯(lián)的,當(dāng)進(jìn)行虛擬拆裝時(shí),受訓(xùn)者可以通過鼠標(biāo)選取某一個(gè)零件,并按照自己的意圖進(jìn)行任意移動(dòng),在此過程中,每個(gè)零件都可能與場景中其他部分發(fā)生碰撞,當(dāng)發(fā)生碰撞時(shí),選取的零件應(yīng)該另外選擇其他路徑離開,而不是發(fā)生穿透現(xiàn)象。因此,每個(gè)零件的拆裝過程都需要考慮碰撞檢測功能,使虛擬拆裝過程更加逼真。
層次包圍盒方法是碰撞檢測中最常用的方法,主要包括球形包圍盒檢測法(Spheres)、坐標(biāo)軸的軸向包圍盒 AABB(Axis-Aligned Bounding Boxes)檢 測 法、 帶方向的包圍盒OBB(Oriented Bounding Box)檢測法、散方向多面體(K—DOP)檢測法、固定方向凸包FDH(Flxed Directions Hulls)檢測法等等。由于OBB 包圍盒具有方向任意,能根據(jù)幾何對(duì)象的形狀特點(diǎn)緊密地包圍幾何對(duì)象,從而成倍地減少包圍盒及基本幾何元素間的相交測試,大大提高了算法的效率。因此,本系統(tǒng)采用該碰撞檢測算法[4]。
2.拆裝邏輯實(shí)現(xiàn)
船舶設(shè)備拆裝過程需要根據(jù)規(guī)范按照一定順序進(jìn)行。在Quest 3D 中,編程進(jìn)行觸發(fā)條件的設(shè)定,可使拆裝過程嚴(yán)格按照規(guī)范進(jìn)行。在Quest 3D 中ChannelSwitch 模塊和有限狀態(tài)機(jī)(FiniteStateMachine)都可以用來實(shí)現(xiàn)程序的步驟化。ChannelSwitch 模塊適用于拆裝步驟比較少的情況,當(dāng)步驟比較復(fù)雜時(shí),該模塊容易造成編程混亂,并且在后續(xù)程序更新、改進(jìn)過程中不易把握。有限狀態(tài)機(jī)是表示有限個(gè)狀態(tài)以及在這些狀態(tài)之間的轉(zhuǎn)移和動(dòng)作等行為的數(shù)學(xué)模型,由于它能輕松實(shí)現(xiàn)復(fù)雜拆裝過程的編程、新步驟的添加以及后期程序升級(jí),因此,本系統(tǒng)的拆裝過程均采用有限狀態(tài)機(jī),可以大大提高開發(fā)速度和質(zhì)量。有限狀態(tài)機(jī)共有三類子連接,連接到第一個(gè)子連接的Value被檢查以觸發(fā)狀態(tài)改變;第二個(gè)子連接代表實(shí)際的狀態(tài),只有當(dāng)前狀態(tài)被調(diào)用;第三個(gè)子連接可以在特定狀態(tài)改變時(shí)被觸發(fā)。同時(shí),編輯界面上還有延時(shí)功能。編輯完成的編程場景如圖4 所示:

圖4 拆裝場景
3.數(shù)據(jù)庫連接
為了實(shí)現(xiàn)系統(tǒng)中操作步驟、成績、幫助等信息的保存和查詢,需要連接外部數(shù)據(jù)庫。在Quest 3D 中可通過MySQL 或ODBC 兩種方式創(chuàng)建數(shù)據(jù)庫連接,MySQL 對(duì)應(yīng)的是DB Driver MySQL 模塊,而ODBC 對(duì)應(yīng)的是DBDriver ODBC,里面封裝了各自的數(shù)據(jù)庫連接協(xié)議。兩個(gè)模塊都要連接到DB Source 信道上起作用。在利用DB Query、DBValue 和DB Text 等相關(guān)通道編輯好邏輯后,就可實(shí)現(xiàn)對(duì)數(shù)據(jù)的查詢讀取和存儲(chǔ)[5]。
(三)網(wǎng)絡(luò)發(fā)布
多人協(xié)同操作功能是基于網(wǎng)絡(luò)發(fā)布而實(shí)現(xiàn)的。只有Quest 3D 企業(yè)版或者VR 專業(yè)版才能進(jìn)行網(wǎng)絡(luò)發(fā)布,實(shí)現(xiàn)多人在線協(xié)同操作以及船舶各部門虛擬操練等功能。在Quest 3D 中,主要利用Network Matrix、Network Text 、Network Value 和Network Buffer 幾個(gè)模塊來實(shí)現(xiàn)網(wǎng)絡(luò)發(fā)布功能。它們依次控制了網(wǎng)絡(luò)矩陣、網(wǎng)絡(luò)文本、網(wǎng)絡(luò)值和網(wǎng)絡(luò)緩沖信息。這些模塊主要控制網(wǎng)上數(shù)據(jù)傳輸,以確保數(shù)據(jù)正確地在客戶端(clinets)與服務(wù)器(server)之間傳送。服務(wù)器選用一臺(tái)專業(yè)圖形工作站作為服務(wù)器,上面存放LNG船舶虛擬培訓(xùn)系統(tǒng)所有的程序以及數(shù)據(jù)。服務(wù)器可以為其他客戶機(jī)提供資源,客戶機(jī)不需要安裝Quest 3D 程序,可在登錄服務(wù)器后從服務(wù)器下載虛擬場景。每一個(gè)場景中都有不同的學(xué)員進(jìn)行在線協(xié)同操作,并且實(shí)時(shí)反饋場景中的狀態(tài)到服務(wù)器以完成場景的同步,并最終實(shí)現(xiàn)場景的共同控制。
三、結(jié)語
利用LNG 船虛擬培訓(xùn)系統(tǒng)對(duì)船員和相關(guān)人員進(jìn)行培訓(xùn),可大大提高船員培訓(xùn)效率;同時(shí)該系統(tǒng)具有重復(fù)利用性,能減少船員培訓(xùn)成本。系統(tǒng)中的場景漫游、虛擬拆裝以及協(xié)同操作等功能不僅讓學(xué)員對(duì)LNG 船舶結(jié)構(gòu)進(jìn)行全方位的了解,更讓學(xué)員對(duì)設(shè)備維護(hù)、修理以及故障排除等技能有了全新的認(rèn)識(shí)。同時(shí),對(duì)LNG 船舶貨物操作、貨倉管路的惰化干燥、再液化等特殊操作進(jìn)行進(jìn)一步的熟悉和練習(xí),實(shí)現(xiàn)對(duì)LNG 船舶操縱做到融會(huì)貫通,為今后在LNG 船工作打下堅(jiān)實(shí)的基礎(chǔ)。
[1]王祎博,王建平.LNG船舶市場前景與我國LNG船員培養(yǎng)模式分析[J].中國水運(yùn),2011,11(11):23-26.
[2]劉向群,吳彬.虛擬現(xiàn)實(shí)案例教程[M].北京:中國鐵道出版社,2012:5-8.
[3]王麗麗,趙曉春,任澤飛等.基于Quest3D的虛擬園林漫游系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].中國農(nóng)學(xué)通報(bào),2009,25(2):180-183.
[4]王偉,馬俊.基于OBB包圍盒的碰撞檢測研究與應(yīng)用[J].計(jì)算機(jī)仿真,2009,26(9):46-50.
[5]路朝龍.Quest3D從入門到精通[M].北京:中國鐵道出版社,2012:203-228.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
辦公室業(yè)務(wù)(2020年18期)2020-09-29 12:15:58
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
勞動(dòng)保護(hù)(2019年7期)2019-08-27 00:41:26
中國科技論壇(2017年7期)2017-07-25 08:49:53
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年16期)2014-03-01 04:28:54
體育師友(2011年5期)2011-03-20 15:29:53