彈射中艦載機快速傳遞對準技術
2014-12-02 06:07:50楊功流王麗芬袁二凱喬立偉
艦船科學技術 2014年3期
楊功流,王麗芬,袁二凱,蔡 玲,喬立偉
(1.北京航空航天大學 儀器科學與光電工程學院,北京100191;2.慣性技術國防重點實驗室,北京100191;3.天津航海儀器研究所,天津300131)
0 引 言
艦載機起飛之前需要完成機載慣導系統的初始對準,而當艦艇遇突發情況需要艦載機緊急起飛時,則要求機載慣導能在極短時間內完成初始對準。如在對方突然襲擊(如潛艇發射反艦導彈)的情況下,留給艦載機的截擊時間一般不超過3min[1],這其中包括指揮反應時間、艦載機和上甲板部門的準備時間、艦載機慣導的初始對準時間,以及艦載機彈射(或滑躍)起飛時間等。因此,艦載機慣導的快速對準一直受到各國的高度重視。
從理論上講,艦載機起飛前、起飛過程中以及起飛后均可以利用外部信息對機載慣導進行初始對準,分別稱之為甲板對準、彈射對準和空中對準。傳統甲板對準的時間較長,一般需要5-8min;空中對準一般需要借助GPS 等衛星導航系統,在戰時容易因GPS 受干擾而導致對準失敗。由于艦載機彈射過程中機體的運動加速度較大,有利于提高系統的可觀測性,因此本文提出了分階段對準方案,即以艦/機慣導彈射過程中的傳遞對準為“粗對準”階段,起飛后實現“精對準”的艦載機快速傳遞對準方案,并重點對艦載機彈射過程中傳遞對準的約束條件及環境影響因素開展研究。
1 艦載機彈射起飛
艦載機彈射起飛是借助彈射器的牽拉,在較短的甲板長度之內以及極短時間內達到離艦起飛要求的最小速度,從而完成起飛。艦載機彈射起飛方式中,存在一個關鍵裝置和一項關鍵技術,即彈射器和前輪拖拽彈射方式,其中后者是實現艦/機慣導傳遞對準的外部約束條件之一。
1.1 彈射器
彈射器的研究最早開始于20世紀初,1912年美國海軍采用壓縮空氣做功原理設計了第1 臺試驗用彈射器,此后各國的工程師先后設計了氣動盤式彈射器、飛輪彈射器、液壓彈射器及蒸汽彈射器等。隨著技術的發展,電磁彈射器以其可控性好、快速反應能力強、可靠性高、效率高、體積小、質量輕,及維護和使用費用低等優點,逐漸取代蒸汽彈射器,開始登上歷史舞臺。美國計劃在2013年后服役的新一代CVN 78 航母上正式使用電磁彈射器,2002年9月開始建造的法國“戴高樂”-2 號航母均安裝電磁彈射裝置[2]。本文以電磁彈射器為艦載機彈射起飛的關鍵裝置為研究重點。
1.2 拖拽方式
艦載機彈射過程中的拖拽方式經歷了從拖索彈射到前輪拖拽彈射的變遷[3]。前輪拖拽彈射與拖索彈射的本質差異是:前者的彈射作用點相對于機身是位于前輪的前面,而后者是位于前輪的后面,如圖1 和圖2所示[4]。這就導致拖索彈射要求飛機在彈射時機身要盡量處在彈射滑軌中心線上,否則會影響飛機的安全彈射。而前輪拖拽彈射允許機身相對于彈射軌道可以有一個進入角φ0,只要前輪上的彈射鉤掛住彈射凹槽,主機輪相對于滑軌有500 mm的偏差,甚至前輪有稍許偏差也不要緊[5-6]。在彈射過程中,飛機會自動進入正確的滑行線,這樣就可大大節省飛機進人彈射位置的時間。因此到目前為止,美國的艦載機除教練機外,幾乎全部采用前輪拖拽彈射方式。本文研究中也以前輪拖拽為研究前提。
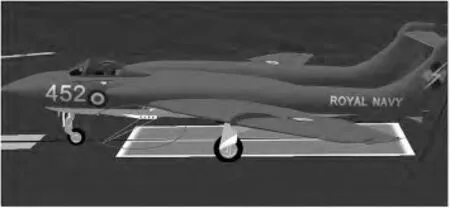
圖1 “海雌狐”(SeaVixen)飛機拖索式彈射三維示意圖Fig.1 3 dimensional chart of the dragging rope catapult for SeaVixen

圖2 A-6E 飛機前輪拖拽彈射三維示意圖Fig.2 3 dimensional chart of the dragging front wheel catapult for A-6E aircraft
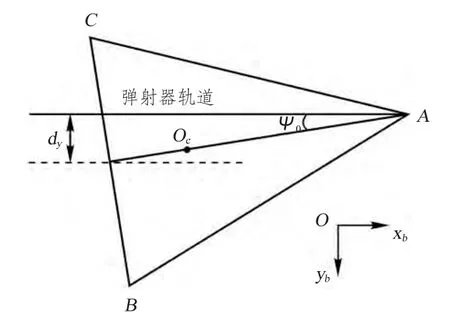
圖3 艦載機進入角Fig.3 Divergence angle of the carrier-based aircrafts
2 艦載機彈射中對準約束條件
實現彈射中艦/機慣導的傳遞對準必須考慮對準時間、艦載機運動、基準信息精度與品質以及各種干擾誤差影響等,上述因素決定了傳遞對準方案的選擇及所能達到的對準性能。
2.1 艦載機彈射約束
1)艦載機與艦艇的相對運動
艦載機彈射過程分為彈射準備階段,沿彈射軌道滑跑階段,及脫離彈射滑軌在艦艇上滑行階段。一般自彈射開始至離艦起飛,總耗時一般不超過3 s。艦載機的離艦速度因艦載機自重而異,一般終態速度最高可達到102.8 m/s 左右[4]。
艦載機彈射過程中,由于初始偏心距的作用,彈射過程中存在較大幅度的姿態變化,且初始偏心距越大,姿態變化幅度越大。一般而言,水平姿態角的變化幅度不超過1°,而航向角的變化幅度最大可達到10°左右[6]。
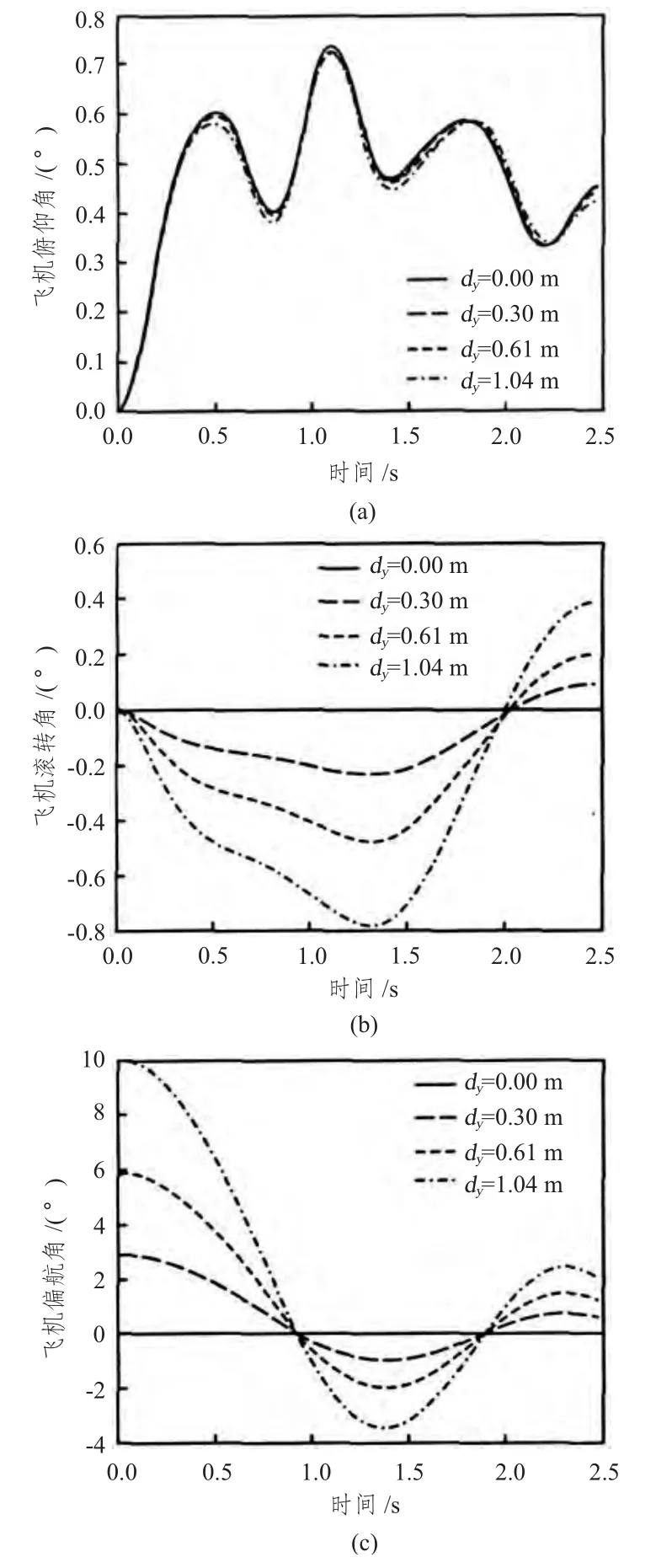
圖4 艦載機姿態變化Fig.4 Attitude changing of the carrier-based aircrafts
2)傳遞對準方法選擇
分析上述彈射過程,艦載機的高速運動對艦/機慣導彈射中傳遞對準的實現利弊共存。
首先,簡化艦載機彈射過程,以勻加速度運動計算,艦載機的加速度可達到3g 左右,其瞬時加速度則更大。因此,艦載機彈射過程中高加速運動過程可以提高含有“線運動”參數為測量量的對準方法的可觀測性,有利于提高對準精度,縮短對準時間。
其次,艦載機彈射時間極短,不利于濾波器的收斂。工程應用中卡爾曼濾波器的濾波周期一般為1 s,2.5 s 的彈射時間內濾波器很難收斂。因此必須通過提高濾波周期、選擇適用匹配方法,或設法延長對準時間的方法解決。
第三,艦、機之間的相對運動,導致很難直接利用主子慣導的姿態信息或角速度信息實現艦/機慣導傳遞對準,同時艦、機隨時間而變的姿態相對變化也將對傳遞對準性能產生不可忽視的影響。
從上述分析可以看出,匹配方法的選擇被限制在“線運動”參數為測量量的對準方法中。一般而言,位置匹配方法的對準速度為三者中最慢,加速度匹配方法最快,因此首先摒棄位置匹配方法。其次,加速度匹配方法對桿臂加速度補償公式時所需的˙r,¨r,以及˙ω等參數只能通過已有參數微分獲得[7],其精度會對補償效果產生一定影響,同時該方法對外界干擾的敏感度大于速度匹配方法,因此除特殊場合外,加速度匹配方法一般很少采用[8~11]。可見速度匹配方法為實現艦/機慣導彈射中對準的最佳方法。
然而,傳遞對準開始時刻載體即存在較大加速運動(特別是加速度大于1g)時,反而不利于速度匹配方法的實現。因此本文提出基于彈射準備及滑跑過程的彈射中傳遞對準方案。即艦載機處于彈射位置時即開始傳遞對準,直到艦載機離艦起飛時刻結束。
2.2 基準信息約束
1)基準信息來源及精度
由于艦載機與艦艇之間存在相對運動,因此艦載慣導的速度信息不能直接作為基準信息使用,而需要利用外部測量設備獲取艦、機相對運動信息,疊加于艦艇速度信息之上,作為艦載機慣導對準的基準信息。
GPS 導航設備可以為艦載機提供精確的位置、速度甚至航向信息,但由于GPS 在戰時容易受到干擾,因此不在本文的考慮范圍之內。激光多普勒測速儀(laser Doppler velocimeter,LDV)是一種新型傳感器,具有精度高、測速范圍寬、動態性能好及非接觸測量等優點。目前已研制的激光多普勒測速儀一般均能達到1% ~2%V (V 為載體的相對速度矢量合)的精度[12],國防科技大學[13-14]研制的激光多普勒測速儀可達到0.1% ~0.2%V 的精度,同時其測量范圍可謂是“無限大”,低至每秒百分之幾毫米,高至每秒幾個馬赫,完全可以實現對艦載機運動速度的精確測量。
但激光多普勒測速儀目前僅能測量艦、機相對速度合矢量,需要將其分解到導航坐標系。雖然由于偏心角的存在,艦載機在沿跑道滑行過程中會存在航向及水平姿態的變化,但其速度合矢量卻被約束在了跑道沿線上,因此可利用跑道航向信息對其進行分解。這樣激光多普勒測速儀測量精度及跑道航向精度也就成為影響基準信息精度的主要因素。通過理論分析和數學仿真獲知,在相對測速精度優于0.2%V(1σ),航向誤差小于3′(1σ)時,速度基準信息的精度優于0.1 m/s (1σ),表明基于激光多普勒測速儀及跑道航向獲得的速度信息可以滿足傳遞對準對基準信息精度的需求。
2)基準信息品質
基準信息品質也會影響對準性能。基準信息的品質一般包括數據更新率、時間延遲及數據跳變等。
①數據更新率。如上文所述,由于艦載機彈射時間極短,應盡量提高數據更新率。據理論分析及數學仿真結果表明,數據更新率越高,對傳遞對準性能的提高越好,一般大于100 Hz 的更新率即可滿足傳遞對準的需求。
②時間延遲。時間延遲的形成主要有2 方面因素:一是數據處理造成的時延;二是數據傳輸造成的時延[14,15-16]。對時延的處理方法有多種,除了通過軟硬件設計保證主子慣導之間的時間同步外,還可以采用數據處理的方法對時延引起的誤差進行補償。
③數據跳變。艦載機被拖索牽引開始滑行時,以及脫離彈射器開始在甲板上自由滑行時刻,艦載機所受加速度均會有比較大的變化,由于時間延遲等原因的存在,會使作為觀測量的速度誤差出現數據跳變。數據跳變在一定程度上會引起濾波器發散,不利于艦/機慣導傳遞對準的實現。目前鄭辛等人提出了應對速度誤差跳變的局部基準速度輸出平滑處理技術,可以有效減弱數據跳變對傳遞對準性能的影響[18]。
2.3 誤差補償約束
影響傳遞對準性能的誤差主要包括艦、機慣導之間的撓曲變形、桿臂長度引起的桿臂誤差,以及大失準角引起的非線性問題等。對速度匹配而言,一定量的撓曲變形對傳遞對準性能影響不大,因此本文暫不考慮該誤差的影響,著重研究桿臂誤差補償以及大失準角問題。
2.3.1 吸附時間 從圖2可見,AB-8大孔樹脂與提取液混合,在吸附2 h時吸附率最高為32.9%,時間延長吸附率沒有升高。因此,吸附時間以2 h為宜。
1)動態桿臂誤差補償
當艦載機處于彈射位置時,由于艦載慣導與機載慣導存在一定距離,因此利用速度匹配方法進行傳度對準時,必須考慮桿臂效應的影響。一般而言,獲得主子慣導之間的桿臂長度以及艦艇的角速度,即可對桿臂速度誤差進行補償[19]。但是當艦載機處于滑行階段時,艦機之間的距離隨著艦載機的滑行而變化,且艦載機的滑行距離一般超過50 m,因此必須實時對桿臂誤差進行計算或估計。
本文以實時解算的方法計算桿臂速度在導航坐標系上的分量。為簡化計算,假設艦艇主慣導位于艦載中心;艦載機處于彈射位置時艦、機慣導之間的相對位置已知;艦艇中軸線與跑道之間的夾角φ 已知;艦載主慣導距艦艇中軸線與跑道交點的距離OmOp已知;艦艇滑行距離由激光多普勒測速儀測量的速度信息經過積分獲得。解算每時刻的桿臂速度誤差時,首先利用艦載主慣導與交點的距離OmOp、艦載機與交點的距離aOp,以及跑道與艦艇中軸線的夾角φ,解算桿臂的長度r;再利用艦載機與交點的距離aOp,跑道與中軸線的夾角φ,及桿臂長度r,解算桿臂長度在主慣導坐標系上的投影;進而解算桿臂速度誤差在導航坐標系上的投影。
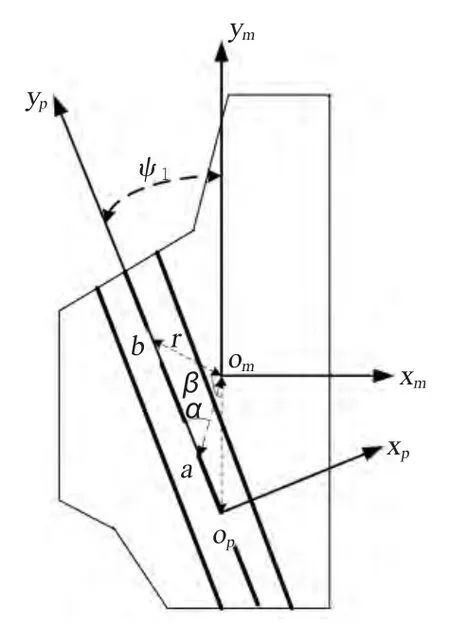
圖5 桿臂長度動態變化Fig.5 Dynamic diversification of the lever arm length
2)大失準角誤差補償
在艦載機進入彈射位置時,雖然由于初始偏心距的存在,使得艦載機的航向與跑道航向存在一定偏差,但是二者還基本一致,一般不超過2°,而跑道航向與艦艇的航向會因跑道設置的不同而存在較大的角度差值。因此在分析研究艦/機慣導傳遞對準問題時,應當考慮大失準角問題。
大失準角問題的存在,使得艦/機慣導傳遞對準誤差模型變為非線性模型,傳統的卡爾曼濾波方法不能實現對機載慣導姿態失準角的估計。處理非線性問題,一般采用EKF 方法或UKF 方法。EKF 是由高斯隨機線性變量來估計狀態分布,然后通過非線性模型的一階線性化轉換為線性模型,再利用線性濾波方法實現傳遞對準。UKF 方法通過確定性的采樣來解決非線性化問題,用最小數量的采樣點來近似狀態分布,之后這些點通過可靠性的非線性系統進行傳播,這樣就使得UKF 對任何非線性系統的估計都能達到三階精度,而EKF 往往只能達到一階精度[20-23]。
雖然UKF 方法相比較KF 或EKF 而言能達到較高的估計精度,但其計算量也成倍增加。由于艦載機彈射時間短、彈射速度快,對濾波器的濾波周期有比較苛刻的要求,因此UKF 方法的應用受到一定限制。本文提出基于跑道航向的艦/機慣導傳遞對準方法。即首先根據艦艇航向、跑道與艦艇中軸線的夾角求解出跑道的航向,將此值作為初始航向值賦值給機載慣導,而不是傳統的將艦艇慣導的航向信息直接賦值給機載慣導。這樣,艦機慣導之間的大失準角問題就轉換為艦載機與跑道航向之間的小角度問題,利用傳統的卡爾曼濾波方法即可實現艦/機慣導的傳遞對準。
3 艦載機彈射中對準方案
綜合分析上述各種約束條件,艦載機彈射中的艦/機慣導傳遞對準方法宜采用速度匹配方法,對準過程宜貫穿于艦載機在彈射準備階段、彈射滑跑階段以及脫離彈射器的自由滑跑階段,對準時間不超過8 s,其中彈射準備階段5 s,彈射過程3 s。
4 結 語
本文對彈射過程中艦載機運動規律對實現艦/機慣導傳遞對準的利弊進行充分的論證,對影響傳遞對準性能的各種干擾誤差,如時間延遲、桿臂效應及大失準角等因素進行分析,并提出誤差補償方法。在上述分析的基礎上,提出艦/機慣導傳遞對準的方案,為艦載機的快速起飛提供了一定保障。
1)利用速度匹配方法可以實現艦/機慣導快速傳遞對準,對準過程宜貫穿于彈射準備階段、彈射滑跑階段以及脫離彈射器的自由滑跑階段,對準時間不超過8 s;
2)數據更新率、基準信息延遲、桿臂誤差以及大失準角誤差會影響傳遞對準性能,如果不對其進行補償,甚至會導致傳遞對準失敗;
3)基準信息延遲可以采用將延遲時間作為狀態量進行估計的方法進行補償,且在相同時延情況下,數據更新率越高,對傳遞對準的影響越小;動態桿臂誤差可以基于艦機運動相對關系進行實時計算而補償;大失準角誤差可以利用跑道航向信息轉換為小失準角問題進行處理。
[1]徐陽.航母編隊的防御能力[J].兵器知識,2010(10A):58-59.
XU Yang.Defence ability of the carrier aircraft formation[J].Ordnance Knowledge,2010(10A):58-59.
[2]李梅武,崔英,薛飛.航母飛機起飛的最佳選擇——電磁彈射系統[J].艦船科學技術,2008,30(2):34-37.
LI Mei-wu,CUI Ying,XUE Fei.Electromagnetic ejection system-the best choice for carrier aircraft taking-off[J].Ship Science and Technology,2008,30(2):34-37.
[3]海獵隼.國產艦載機采用前輪拖拽彈射可行性探討[J].艦載武器,2007(4):73-77.
HAI Lie-sun.The engineering feasibility of nose-tow catapulting for carrier-based aircraft[J].Shipborne Weapons,2007(4):73-77.
[4]朱熠.艦載機起飛控制與仿真技術研究[D].南京:南京航空航天大學,2012.
ZHU Yi.Research on control and simulation of launch technology for carrier-based aircraft[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2012.
[5]馬世強.棄重就輕——美國航母彈射技術變遷[J].環球軍事,2006,117:53-54.
MA Shui-qiang.Abandoned heavy on the light-the U.S.aircraft carrier catapult technological change[J].Global Military,2006,117:53-54.
[6]于浩,聶宏.艦載機偏中心定位彈射起飛動力學分析[J].南京航空航天大學學報,2010,42(5):537-542.
YU Hao,NIE Hong.Dynamics analysis of carrier-based aircraft with off-center catapult launch[J].Journal of Nanjing University of Aeronautics and Astronautics,2010,42(5):537-542.
[7]孫昌躍.捷聯慣導系統傳遞對準研究[D].哈爾濱:哈爾濱工業大學,2009.
SUN Chang-yue.Transfer alignment for strapdown inertial navigation system[D].Harbin:Harbin Institute of Technology,2009.
[8]VEPA N M.A dynamic alignment system for applications on flexible plotforms such as ship[J].Gyro Technology,1989:16.10-16.13.
[9]SCHNEIDER A M.Kalman filter formulatons for transfer alignment of strapdown inertial units[J].Navigation,1983,30(1):72-89.
[10]TITTERTON D H,WESTON J L.Dynamic shipboard alignment techniques[C].Proceedings of DGON Symposium on Gyro technology.Germany,1987(9).0-9,27.
[11]TITTERTON D H,WESTON J L.RAE F.The alignment of ship launched missile IN systems[C].IEE Colloquium on Inertial Navigation Senser Development.London,UK,1990:1/1-116.
[12]劉飛.激光多普勒測速儀的研究[D].長春:長春理工大學,2006.
LIU Fei.Reserch on laser doppler velocimeter[D].Changchun,Changchun University of Science and Technology,2006.
[13]魏國,王宇,周健,等.基于激光多普勒測速儀的車載組合導航[J].強激光與粒子束,2011,23(1):49-53.
WEI Guo,WANG Yu,ZHOU Jian,et al.Vehicle integrated navigation based on laser Doppler velocimeter[J].High Power Laser and Part Icle Beams,2011,23(1):49-53.
[14]周健,龍興武.載體振動對差動激光多普勒測速儀的影響[J].強激光與粒子束,2011,23(2):325-328.
ZHOU Jian,LONG Xing-wu.Influence of vehicle′ s vibration on dual-beam laser doppler velocimeter[J].High Power Laser and Part Icle Beams,2011,23(2):325-328.
[15]解春明,趙剡,楊傳春.信息時標不一致對傳遞對準的影響及修正[J].中國慣性技術學報,2010,18(4):412-420.
XIE Chun-ming,ZHAO Yan,YANG Chuan-chun.Influence and compensation of time-mark discrepancy in transfer alignment[J].Journal of Mechanical Science and Technology,2010,18(4):412-420.
[16]JOON L,YOU-CHOL L.Transfer alignment considering measurement time delay and ship body flexure[J].Journal of Mechanical Science and Technology,2009,23(1):195-203.
[17]鄭辛,付夢印,周章華.一種應對主基準速度誤差跳變的局部基準速度輸出平滑處理方法[J].慣性技術學報,2012,20(1):24-28.
ZHENG Xin,FU Meng-yin,ZHOU Zhang-hua.Smoothing processing method of local reference output speed in response to master reference speed error jump[J].Journal of Chinese Inertial Technology,2012,20(1):24-28.
[18]羅彬.艦載武器慣導系統傳遞對準仿真驗證系統的研究與設計[D].哈爾濱:哈爾濱工程大學,2012.
LUO Bin.The research and design of transfer alignment simulation and verification system on ship carried weapon inertial navigation system[D].Harbin:Harbin Engineering University,2012.
[19]魏學通,高磊.大方位失準角下艦載機傳遞對準技術[J].中國慣性技術學報,2012,20(5):553-556.
WEI Xue-tong,GAO Lei.Transfer alignment of carrier-born aircraft under large azimuth misalignment angle[J].Journal of Chinese Inertial Technology,2012,20(5):553-556.
[20]周菊華,程向紅.簡化UKF 在SINS 搖擺基座上的初始對準[J].彈箭與制導學報,2009,26(3):65-68.
ZHOU Ju-hua,CHENG Xiang-hong.The application of simplified UKF to initial alignment of SINS on swaying base[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,26(3):65-68.
[21]XU Xin-yu,LI Bao-xin.Rao-blackwellised particle filter with adaptive system noise and its evaluation for tracking in surveillance[M].Proceedings of SPIE the International Society for Optical Engineering,2006.
[22]嚴恭敏,嚴衛生,徐德民.簡化UKF 濾波在SINS 大失準角初始對準中的應用[J].中國慣性技術學報,2008,16(3):253-264.
YAN Gong-min,YAN Wei-sheng,XU De-min.Application of simplified UKF in SINS initial alignment for large misalignment angles[J].Journal of Chinese Inertial Technology,2008,16(3):253-264.
[23]KAIN J E,CLOUTIER J R.Rapid transfer alignment for tactical weapon applications[C].Proceedings of AIAA Guidance,Navigation and Control Conference,1989:1290-1300.
[24]JONES D,ROBERTS C,TARRANT D,et al.Transfer alignment design and evaluation environment[C].IEEE Proceedings of Aerospace Control Systems,1993:753-757.
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28