面向服務的艦艇編隊反潛作戰任務多分辨率建模研究
2014-12-05 02:19:10肖明彥
艦船科學技術 2014年8期
關鍵詞:模型
劉 劍,肖明彥,章 陽
(海軍潛艇學院,山東 青島266071)
0 引 言
水面艦艇編隊反潛作戰仿真由于實際作戰的戰場態勢不確定性和作戰行為的復雜性,一直是當前海戰仿真領域研究的重難點問題。編隊反潛作戰仿真的細粒度建模是系統模型正確性驗證的必要保證,但是在此基礎上如何兼顧系統運行效率,提高系統模型資源可重用性以滿足海戰多兵力聯合作戰仿真的實時性需要,這就對艦艇編隊反潛作戰仿真提出了多分辨率建模和模型資源可復用需求。
現有面向服務的軍事作戰仿真研究和多分辨率建模研究的模型仿真工程化研究還不足,且多專注于聚合級實體的多分辨率建模,對兵力任務行為多分辨率建模研究相對較少,難以將兩者結合以滿足復雜海戰仿真系統的需求[1-2]。對此,采用聚合與解聚方法對編隊反潛作戰進行多分辨率建模,并構建了面向服務的編隊智能兵力反潛作戰行為組件化模型。
1 艦艇編隊反潛作戰多分辨率建模方法
多分辨率建模通常關注于聚合級實體,通過對聚合級實體的作戰行為進行足夠的建模,以有效地解決平臺級實體仿真中出現的規模大、模型復雜、網絡負載大等問題[3]。由此,可以通過對編隊反潛作戰的多分辨率仿真建模滿足海戰仿真的戰術和戰役2 個層級的需求,在戰役層次以低仿真分辨率運行以提高系統仿真運行效率,在戰術層次以高分辨率建模以仿真實現作戰過程細節,或者在實際仿真中根據系統仿真粒度將兩者結合起來兼顧仿真粒度和運行效率,響應系統不同仿真分辨率需求。
目前多分辨率仿真建模的方法有優化選擇法、視點選擇法、聚合解聚法、多重表示建模法、IHVR法、替代子模型法等幾種[4]。其中聚合解聚法(Aggregation-Disaggregation)由于其思路直觀,易于理解,比較符合軍事人員的思維方式特點,可用于編隊反潛作戰仿真的多分辨率建模。對于聚合與解聚方法,兵力層次的聚合就是把若干個體綜合成能表示這些個體總和的綜合體,解聚與聚合相對應就是通過計算相對應原子實體的初始狀態來把聚合實體變成原子實體的過程[5]。而編隊反潛作戰行為任務的聚合與解聚相對復雜,聚合指從兵力最底層不可再分的任務行為出發,如機動、武器發射、傳感器探測等任務行為,構建成更高一層的兵力階段性任務行為,如魚雷攻擊、導彈攻擊等,并在此基礎聚合將兵力層級的任務行為聚合成編隊層級的作戰任務行為,編隊魚雷攻擊、編隊對空防御等。與之相對應,任務解聚就是根據從編隊層級的作戰任務出發,將其分解成更為底層,粒度更細的兵力層級的任務行為。
2 編隊反潛作戰任務行為多分辨率建模
2.1 編隊反潛作戰任務行為多分辨率模型
編隊反潛作戰任務行為層次劃分和分解對于聚合作戰模型特別重要,必須對宏觀的任務進行具體地分解,直到有模擬實體可執行的程度,這就是兵力任務解聚的過程[6]。將編隊反潛作戰任務行為可劃分為2 個層次:
1)兵力層反潛作戰任務行為模型
在編隊協調反潛作戰條件下,艦艇兵力層反潛作戰任務行為模型描述單艦具體作戰任務行動的軍事過程,結合工程實際可進一步劃分為兵力任務級行為和兵力原子級行為2 種:任務級行為指的是兵力按照任務屬性可以劃分成的階段性任務行為,例如魚雷攻擊、接敵跟蹤、導彈防御等;原子級行為指的是任務級行為下相對獨立地不可再分的動作行為,其往往具有不可再分的粒度,例如變向變速、發射武器。
2)編隊層反潛作戰任務行為模型
編隊層任務行為模型按照編隊實際作戰過程,可以劃分為編隊對潛搜索、編隊對潛跟蹤、對潛攻擊、魚雷防御、導彈防御、綜合防御等模型。編隊層任務行為的主要功能是對完成該任務所需兵力的任務規劃和任務執行的監測與控制,實現編隊宏觀層次的對兵力作戰任務行為的效能分析與指揮控制。以編隊對潛攻擊任務為例,編隊任務行為模型輸入戰場態勢信息,決策輸出各兵力的任務指派信息,包括艦艇攻擊、艦艇協同攻擊、直升機搜索攻擊等,觸發和調度各兵力相應任務級行為模型,而在兵力層的任務級行為模型中依據戰場信息和任務決策執行邏輯,進一步觸發和調度其下各不同的兵力層原子級行為,例如艦艇機動、傳感器使用、目標運動要素解算等,從而表現出編隊對潛攻擊的全過程行為。因此,編隊反潛作戰任務行為的多分辨率模型層次可劃分為如圖1所示。
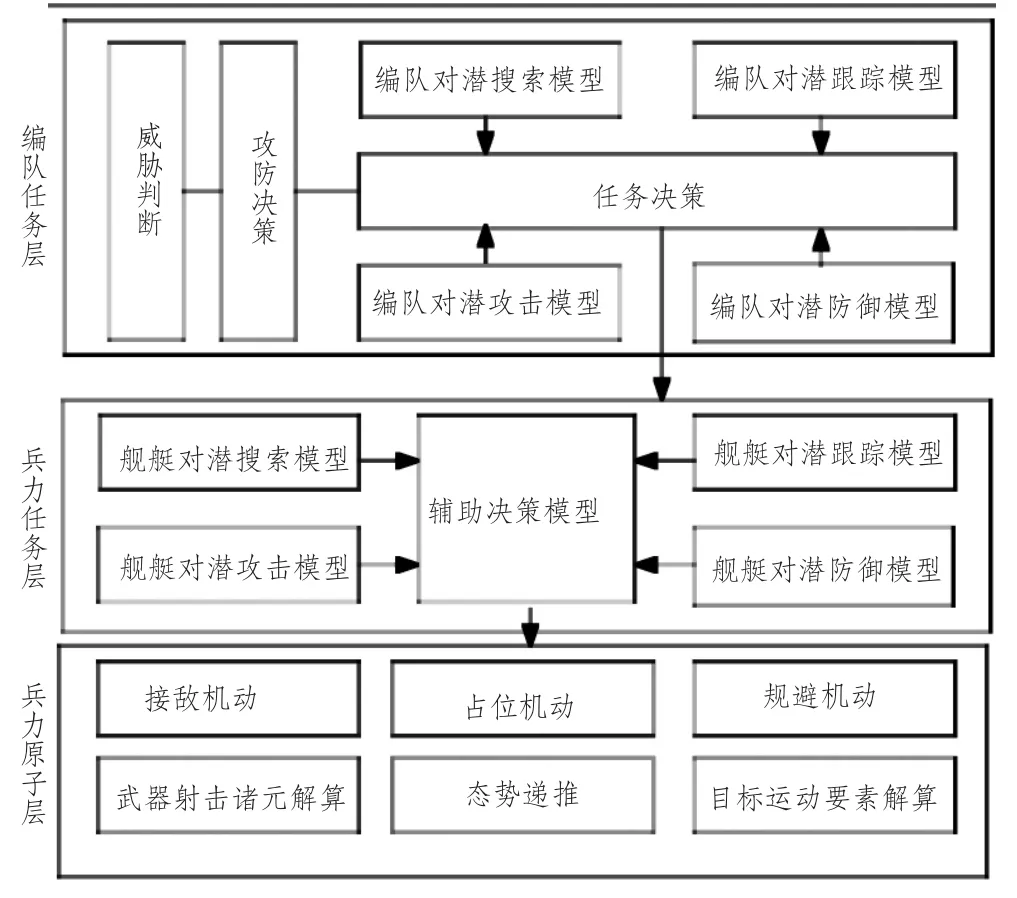
圖1 編隊反潛作戰行為模型層次圖Fig.1 Hierarchy chart of fleet ASW behavior model
從圖1 可見,編隊反潛作戰的編隊層任務行為模型和兵力層任務行為模型包含了本層級任務行為的決策知識,即任務行為決策模型,完成該各層次任務行為分解,將其解聚為不同的下一層級子行為模型,而各底層原子級行為依據上層行為決策所確定的調度依序執行,進而展現艦艇智能兵力的復雜作戰行為。
2.2 編隊反潛作戰決策模型
編隊反潛作戰決策模型的功能是對本層級作戰行為進行分解與規劃,根據戰場信息,進行態勢評估、任務評估和任務再規劃,將本層級作戰行為解聚成下一層級的作戰任務行為。作戰任務決策模型的工作過程包含了正向和反向信息反饋的環節,即通過任務決策控制參數的調整,有意識地控制兵力作戰樣式、兵力任務分配方案、兵力武器使用類型、作戰時間并聚合兵力的本層級作戰任務行為,這是正反饋過程;而解聚輸出下一層的作戰行為的任務執行信息,并作為本層級作戰行為進行任務再規劃的是一個反向反饋過程,使得兵力能夠不斷適應戰場態勢的變化調整作戰行為,表現出兵力決策的智能性。其層次嵌套的結構如圖2所示。
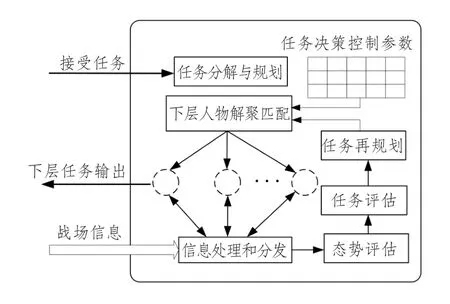
圖2 艦艇作戰行為決策模型示意圖Fig.2 Diagram of ship operation decision model
編隊層任務級任務行為決策和兵力層任務行為任務決策模型的輸入都是本層級的任務行為信息,輸出則是解聚而成的下一層的作戰方案或任務行為,包含方案信息、行動協調信息和數據綜合處理信息。2 種模型具有相似的構成和工作過程,所不同的是編隊層任務行為決策知識是編隊全局的任務決策知識,對各兵力任務行為進行分配和控制,而兵力層行為決策知識是兵力本任務的決策知識,控制兵力下一層原子級行為的轉換,這樣的形式能夠有效減少決策知識的搜索匹配量,而不需要每周期通過全局的決策知識匹配同時控制不同層級的作戰行為,有效提高了決策的知識效率。
任務行為決策的匹配控制通過任務解聚匹配器實現,因此任務的解聚匹配成為作戰任務決策模型的核心和關鍵。匹配通過模板匹配的方法,匹配規則實現采用了Lua 腳本語言,這是因為Lua 是一種易于擴展的語言,也是一種易整合語言,與C++語言互補,特別適合組件建模思想,可以將一些已經存在的高級組件模塊化整合在一起實現一個應用軟件[7]。
2.3 編隊反潛作戰任務行為的多分辨率接口
編隊反潛作戰的不同層次任務行為中編隊層任務行為模型應設計具有多分辨率接口,而兵力層任務行為則僅在高分辨率下運行。這是因為在低分辨率情況下,多兵力聯合反潛作戰仿真特別是戰役層次的仿真推演對于編隊的仿真數據需求表現為編隊兵力對目標的毀傷概率、對目標毀傷達成時間、防御成功概率、編隊兵力生存數量等粒度相對較粗的數據細節,而不需要細粒度的行為仿真,這些關鍵數據需要依據完整的作戰態勢信息才能計算,將其放入編隊層任務行為模型中,不僅能夠方便數據輸入,同時能夠有效地減少通信負載,降低資源損耗和程序復雜度,也只有在編隊層的全局態勢下,才能輸出得到客觀的仿真數據,編隊層任務行為模型接口如圖3所示。
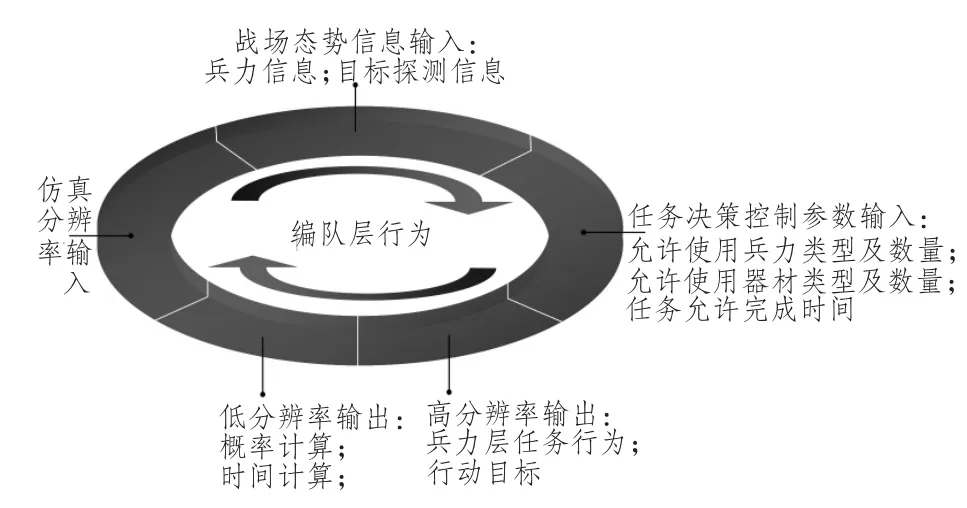
圖3 編隊層行為模型組件接口圖Fig.3 Component interfaces of fleet operation behavior layer
戰場態勢信息輸入接口:該信息為包含了編隊兵力運動要素和狀態信息以及目標探測信息的復雜數據結構,用于編隊任務的解聚和指標計算。
仿真分辨率輸入接口:分辨率分為高分辨率和低分辨率2 種,根據輸入的分辨率驅動模型組件輸出高粒度的兵力任務方案信息或低粒度的任務指標信息。
任務決策控制參數輸入接口:該信息為包含了該任務下編隊允許使用兵力及武備等任務執行信息的復雜數據,可以通過決策控制參數的改變和調整完成編隊層任務行為的重組和變換,表現出不同類型、可控甚至新型的任務行為,這也是設計的創新所在。
低分辨率任務輸出接口:任務行為模型根據輸入信息計算各種任務執行指標,包括任務的完成概率、時間、所需兵力數量、幸存兵力數量等,為仿真推演提供數據支持。
高分辨率任務輸出接口:任務行為模型根據輸入信息進行任務行為解聚,輸出當前仿真時刻下編隊各兵力的任務指派和控制信息。
以上接口中,對編隊層行為模型的輸出接口作如下說明:
1)低分別率任務指標輸出
任務指標輸出信息為編隊當前任務的關鍵指標信息,例如編隊執行對潛攻擊任務時,任務指標輸出信息包含攻擊任務的命中概率和攻擊時間指標,用于戰場效能評估計算和指揮員干預操作。低分辨率任務指標由低層的高分辨率指標聚合而出,其推理結構如圖4所示。
設編隊層的低分辨率任務指標為Z,且Z=f(Y),其中f(Y)為方案指標聚合函數,元素Y1,Y2,Y3作為兵力層任務指標表示當前編隊作戰任務下不同種兵力方案的任務效能;Yi=Gi(Xij),其中Gi(Xij)為武備指標聚合函數,元素X1j,X2j…X3j,作為武備層指標描述高分辨率下兵力i 使用某類型武器j 對任務的完成能力,其數據來源于解析計算或者仿真數據。以編隊對潛攻擊任務為例,編隊對目標的攻擊毀傷概率Z 由不同兵力攻潛方案效能指標Yi經過優選聚合而成,而Yi則源于該方案下各兵力使用j 種武器對目標的毀傷概率Xij,對于Xij例如艦艇采用管狀魚雷射擊時,其對目標的命中概率可以解析計算得出[8]。因此,通過低層的兵力層高分辨率指標的聚合可得出高層的編隊任務層低分辨率任務指標,該指標在仿真時可進一步作抽樣以判斷攻擊目標的毀傷狀態,為戰役仿真推演、在線統計和效能評估提供依據。需要說明的是低層高分辨率變量指標的向上聚合是兵力和武備的優選過程,而反過來給定高層的編隊低分辨率任務指標后,可得到許多滿足聚合關系的高分辨率變量的值,這也正是編隊任務指派方案的計算過程。
圖4 編隊層行為模型組件接口圖Fig.4 Low scale indicative output of fleet operation behavior layer
2)高分辨率決策輸出
決策輸出信息為當前作戰態勢下的編隊兵力作戰任務分配方案信息,其過程編隊任務決策模型根據戰場態勢信息,優選兵力使用方案和武器使用類型,將編隊任務解聚為編隊內各兵力的相應任務級行為,指定作戰目標和武器使用類型,而兵力的任務級行為則按照輸入信息和行為決策知識,以一定時序解聚該任務行為,輸出其下的不同底層原子行為從而不斷適應戰場態勢的變化,表現出編隊智能兵力自主作戰行為的智能性和細粒度。
3 編隊反潛作戰多分辨率任務行為的組件模型
編隊反潛作戰任務行為的多分辨率模型結構層次便于對兵力任務行為進行模塊化的優化設計,完成智能兵力作戰行為的聚合和解聚,并且通過各種行為模型和決策模型的接口設計,進一步完成對智能兵力作戰行為的重構,這實際上就是一種組件化建模的思想。由于組件技術EJB(Enterprise Java Beans)軟件設計模式所提出的模塊化建模的思想,使得復雜的多層應用系統開發變得容易,并能隨著系統應用規模的不斷擴大,提高組件模型的可重用性和靈活性,因此可以用來構建編隊反潛作戰行為的模塊化組件,并快速、準確和高效地組合兵力行為模型資源。
根據編隊反潛作戰任務行為的層次化結構,可以將各層級行為設計為EJB 中的會話Bean 形式。其中編隊和兵力層的任務級行為設計為EJB 中的有狀態會話Bean 的形式,從而可以將任務行為的各種屬性和特點能在服務器端長久保持狀態,保存仿真過程中的各類歷史數據供本組件或其他組件引用,并根據所保持的身狀態對下一仿真步長時的組件狀態進行遞推;兵力層的原子級行為大多設計為EJB 中的無狀態會話Bean 的形式,可以為編隊作戰仿真模型組件提供無狀態的業務邏輯服務,這些服務在仿真調用過程中不需要保存任何數據狀態,EJB 容器可根據仿真對象提出的調用請求動態生成和注銷可重用的無狀態會話組件,從而能夠有效減小系統資源。EJB 技術的一個重要特點是EJB 組件可以通過接口的重新組合來表現新的業務屬性[9],這一特點確保了海戰仿真模型組件能夠依靠組件內部不同接口的組合使行為組件模型表現不同作戰行為。因此為了達到編隊作戰仿真模型體系可重配置和提高兵力行為模型資源重用性的目的,應該對仿真模型對應的各會話Bean 定義組件接口,關系如圖5所示。
圖5 編隊智能兵力行為模型組件結構級接口關系圖Fig.5 Structure and interfaces chart of fleet operation behavior
圖5 中將決策列在任務行為之下以突出兵力行為決策在行為模型中的重要性,而且編隊反潛作戰任務行為模型中除了編隊層和兵力層任務行為模型組件外,還需要一些底層模型的支持,例如平臺運動模型、傳感器探測模型等等。底層模型根據原子級行為的輸入控制參數,在數據庫支持下,按照兵力戰場環境特性和平臺武器物理特性完成兵力的平臺運動、傳感器探測、武器和對抗器材彈道仿真,從而表現兵力的物理和環境模型的仿真細節,表現出兵力的物理模型特性,由于底層支持模型通常包含了多個組件模型,因此以包的形式表示為多個組件的組合;大氣環境和水聲環境模型根據數據庫參數,仿真實現兵力作戰的環境特性,計算包括水聲傳播損失、電磁環境因子等數據,表現出兵力的環境模型特性。圖5中所表現的組件從左至右、從頂層行為組件到底層行為組件解聚的過程,正是兵力作戰從信息流到能量流的傳遞過程。
4 系統仿真多分辨率運行協調機制
4.1 多分辨率并發表示沖突協調
由于編隊層任務行為組件具有不同分辨率的接口,需要考慮組件2 種接口對外輸出信息時是否會存在沖突的問題,這一類的沖突問題也稱之為“并發交互沖突”[10-11]。編隊層任務行為模型組件采用面向對象的建模方法和組件化建模技術,在高分辨率仿真下組件行為決策模型將任務使命級行為解聚為兵力層級任務行為,并觸發下一層原子級行為組件調用,2 種層次行為模型的業務邏輯一致且不沖突;在低分辨率仿真下,編隊層任務行為模型組件依據戰場信息進行任務指標計算,而與具體的行為細節無關,這樣的一種模型設計可以使模型在高低不同分辨率下以協調的機制運行,避免了2 種分辨率接口輸出內容的重疊和交互沖突的出現。但是當仿真運行從高分辨率轉換到低分辨率時,需要考慮高分辨率的細粒度行為模型組件調用所致的戰場態勢變化對低分辨率任務指標計算的影響。
4.2 多分辨率運行時間協調機制
當仿真從低分辨率轉換到高分辨率或者一直運行于高分辨率時,例如某些情況下評估編隊對潛攻擊任務時魚雷武器發射對戰場態勢影響,但是高分辨率運行時將所有作戰模型組件都處于高分辨率是不必要的,可以根據需要將編隊兵力組件以低分辨率仿真運行,而將武器和對抗器材等組件以高分辨率運行,需要對仿真運行的時間推進進行合理管理使不同仿真分辨率協調推進。
仿真時間推進協調由時間管理組件完成,當仿真中運行有不同仿真分辨率組件時,高分辨率仿真實體以較小的步長Th進行時間推進,低分辨率仿真實體以相對較大步長Tl進行時間推進,步長可以在仿真初始化中設置,且Tl為Th的整數倍。仿真時間管理組件采用時間仲裁機制,其檢測所有實體請求推進時間,只有當所有實體請求推進至相同時間時,系統才允許下一周期的仿真推進,而在低分辨率仿真實體推進的等待時間中,高分辨率仿真實體可以仿真推進多步,以完成內部的復雜仿真計算,其發送至低分辨率實體交互信息將由低分辨率實體在下一仿真周期處理,其仿真推進過程如圖6所示。
圖6 中Tsi為系統仿真同步時間點,不同分辨率實體在各自仿真推進周期內完成實體屬性信息更新和交互的處理,通過這樣的同步協調機制,完成不同分辨率模型仿真功能,既保證系統仿真精度和逼真度,又能有效減小系統仿真運行所需資源,提高系統運行效率。
圖6 不同仿真分辨率組件時間協調推進機制Fig.6 Time advanced coordinative mechanism of components for different scale simulation
5 編隊反潛作戰任務行為模型組件仿真流程與實現
系統仿真采用Netbeans7.0 仿真平臺和glassfish3.0 的j2ee 服務器,構建海戰編隊兵力反潛作戰仿真行為模型組件及其他支撐組件,當啟動仿真系統后,用戶可以靈活部署配置仿真兵力單元,并設置編隊任務行為決策控制參數和武器裝備參數。仿真開始后,兵力組件接收任務和決策控制輸入信息,根據輸入的分辨率向客戶端反饋高分辨率下的兵力狀態、目標和任務執行信息或者低分辨率下的任務指標信息,并可在仿真運行過程中通過控制決策參數調整改變兵力任務執行,對兵力作戰行為進行干預控制仿真流程如圖7所示。
圖7 系統組件仿真流程圖Fig.7 Flow chart of system components running in simulation
仿真開始前,啟動glassfish 服務器,打開客戶端應用程序,建立與服務器的鏈接,在客戶端應用程序完成兵力配置和任務編輯后,發送兵力初始化消息命令,調用服務器中的相關組件實例,編隊層任務行為組件接收配置的使命任務和任務決策控制參數,對任務行為解聚或者計算任務指標,兵力層任務級行為組件接收上級組件解聚輸出的賦予任務行為信息將當前任務級行為解聚成下層原子級行為,并生成原子級行為組件實例;兵力層原子級行為組件執行輸出對兵力的平臺、傳感器、武器和對抗器材的控制信息,這些控制信息傳送給底層支撐組件,底層支撐組件在仿真管理組件的時間步進協調下完成仿真的推演,依序進行仿真推進,從而仿真實現兵力的復雜作戰行為。
6 結 語
對編隊反潛作戰行為進行合理的層次化優化結構設計,采用聚合與解聚的方法,利用J2EE 體系結構和組件技術構建了編隊兵力作戰行為仿真模型,不僅能夠靈活部署兵力仿真單元的各型配置參數,對兵力的作戰任務行為進行解聚和聚合,輸出不同仿真分辨率下的作戰行為和作戰指標,響應海戰仿真不同仿真分辨率的需求,并能通過對兵力任務行為決策控制參數的調整,實現兵力作戰行為模型和重構,加載軍事領域專家設定的不同作戰對象戰法知識,完成兵力現有和新型戰法戰術的驗證,滿足了系統作戰仿真多分辨率建模與模型資源可重用性的需求。
[1]華玉光,徐浩軍.多分辨率建模航空武器裝備體系對抗效能評估[J].火力與指揮控制,2009,34(1):8-10.
HUA Yu-guang,XU Hao-jun.The effectiveness evaluation of aero weapon equipment system conflict based on multiresolution modeling[J].Fire Control & Command Control.2009,34(1):8-10.
[2]王杏林,郭齊勝,丁士擁.任務空間概念模型及其形式化描述[J].系統仿真學報,2003,35(10):1408-1410.
WANG Xing-lin,GUO Qi-sheng,DING Shi-yong.Discussion and formal abstract description of conceptual model of mission space[J].Journal of System Simulation,2003,35(10):1408-1410.
[3]楊立功,郭齊勝,張偉.聚合級實體仿真中任務的分解與解聚[J].系統仿真學報,2006,18(2):186-190.
YANG Li-gong,GUO Oi-sheng,ZHANG Wei.Mission decomposition and mission disaggregation for aggregated force simulation[J].Journal of System Simulation,2006,18(2):186-190.
[4]LIU Bao-hong,HUANG ke-di.The concept and some design issues about multi-resolution modeling in HLA[C].Shanghai,China:ICSC 2002.
[5]楊立功,郭齊勝.聚合級實體仿真中的若干關鍵問題分析[J].系統仿真學報,2006,18(2):373-375.
YANG Li-gong,Guo Oi-sheng.Analysis of some key problems in aggregated force simulation[J].Journal of System Simulation,2006,18(2):373-375.
[6]劉寶宏.多分辨率建模的理論與關鍵技術研究[D].長沙:國防科技大學,2003:22-36.
LIU Bao-hong.Research on the theory and key techniques of multi-resolution modeling[M]Changsha:Notional Vniversity of Defense Fech nology,2003:22-36.
[7]黃震宇,楊任農,白娟,等.空戰訓練中虛實兵力對抗系統設計[J].計算機工程與科學,2011,33(5):80-83.
HUANG Zhen-yu,YANG Ren-nong,BAI Juan,et al.Design of a virtual and reality air force integrative combat system[J].Computer Engineering & Science,2011,33(5):80-83.
[8]李長軍,王順意.一種潛艇直航魚雷攻擊低速水面艦艇的方法[J].魚雷技術,2011,19(5):396-398.
LI Chang-jun,WANG Shun-yi.A method for attacking lowspeed surface ship with submarine′ s straight running torpedo[J].Torpedo Technology,2011,19(5):396-398.
[9]PAOLA I,SEBASTIAN U.proving.Deadlock freedom component-based porgr aming[J].Fundamental Approaches to Software Engieneering,4th Internaitonal Coneference,FASE2001.SPirnger-verlag Berlin Heidelbegr,2001.
[10]ANAND N.Consistency maintenance in concurrent representation[D].Doctor Dissertation of University of Virginia,2000.
[11]劉寶宏,黃柯棣.分布交互式仿真中的多分辨率模型并發運行問題研究[J].系統仿真學報,2007,19(5):1038-1041.
LIU Bao-hong,HUANG Ke-di.Research on parallel implementation of multi-resolution models in distributed interactive simulation[J].Journal of System Simulation,2007,19(5):1038-1041.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19