基于LED的水下目標高速攝像照明系統(tǒng)設計
2014-12-05 02:19:06曹曉燕謝仁富張彥敏
艦船科學技術 2014年8期
曹曉燕,謝仁富,張彥敏
(武漢第二船舶設計研究所,湖北 武漢430064)
0 引 言
目前,高速攝像技術已發(fā)展到相當水平,攝像機的分辨率、靈敏度、信號傳輸性能等都已有較大提高,高速攝像系統(tǒng)在航空航天科技、彈道軌跡研究以及超高質(zhì)量電影拍攝等領域獲得了廣泛的應用。隨著水下應用的拓展,高速攝像在水下爆炸、水下武器發(fā)射、水下尾流氣泡試驗研究等領域的應用也越來越廣[1-3]。
照明技術是水下高速攝像中非常重要內(nèi)容,這是由于光在水中傳輸會受到水下諸多因素的影響使得水下自然光照條件很差,并且由于吸收和散射的影響使得水下傳輸距離非常有限[4-5]。高速攝像的拍攝幀率很高,所以對照明的要求更高,因而,水下輔助照明系統(tǒng)就成了水下高速攝像系統(tǒng)必不可少的重要組成部分。
1 水下光學及水下照明
光在水下的傳播性質(zhì)與在空氣中的傳播性質(zhì)不同,即使是經(jīng)過過濾的最純凈的水,它對光的衰減也是很嚴重的,因此需要結合水下光學性質(zhì),進行合理的水下照明系統(tǒng)設計。水體的光學性質(zhì)可分為兩類[5]:1)固有光學性質(zhì)(IOP),它僅與傳輸介質(zhì)本身的物理特性有關;2)外顯光學性質(zhì)(AOP),它決定于水體固有光學性質(zhì)和與介質(zhì)周圍光場相關的光學性質(zhì)。
固有光學性質(zhì)主要指水對光的散射和吸收,散射和吸收作用是光在水中傳播的2 個基本過程,它們造成光的衰減。水中光散射是指光在水中傳播時,受到介質(zhì)微粒的作用,偏離原來直線傳播的方向,它包括水中的米氏散射、瑞利散射和透明物質(zhì)的折射所引起的隨機過程。吸收是光子能量轉(zhuǎn)變?yōu)闊崮堋⒒瘜W能等引起的多種熱力學不可逆過程。水對光的吸收在不同的光譜區(qū)域是不同的,具有明顯的選擇性。水對光譜中的紫外和紅外部分表現(xiàn)出強烈的吸收,在可見光譜區(qū)段,吸收最大的分別是紅色、黃色和淡綠光譜區(qū)域。純凈水和清的大洋水在光譜的藍-綠區(qū)域透射比量大,其中波長462 ~475 nm 的藍光衰減最少,因此,在水下照明應用時應盡量選擇藍綠光作為水下照明。
水中拍攝的照片的對比度比陸地上的低很多[6]。在沒有自然光照明的情況下,水下光源便成為水下攝像時不可缺少的裝置,在選擇水下照明設備時,必須考慮到光的波長分布范圍、介質(zhì)的光學特性以及攝像設備的靈敏度。藍光LED 在水中具有較強的穿透能力,兼具壽命長、環(huán)保、可靠性高、無頻閃,低溫啟動快等特點,能夠獲得良好的照明效果,因此非常適合應用于水下照明。
2 水下高速攝像系統(tǒng)
本文的水下高速攝像系統(tǒng)主要用于某水池內(nèi)水下發(fā)射裝置的試驗拍攝。整個系統(tǒng)主要包括:高速攝像機、水下專用鏡頭、水下照明燈陣列、控制與數(shù)據(jù)采集和傳輸系統(tǒng)、計算機控制系統(tǒng)等,水下高速攝像系統(tǒng)框圖如圖1所示。
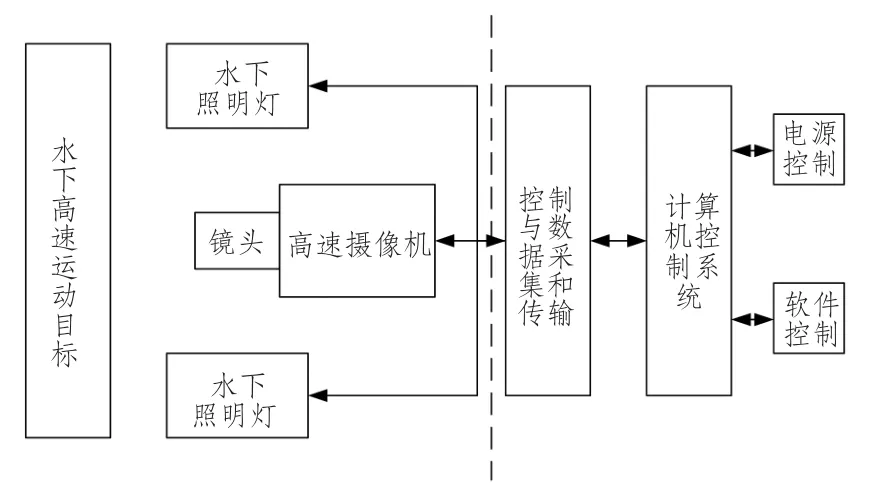
圖1 水下高速攝像系統(tǒng)框圖Fig.1 Skeleton drawing of underwater high-speed photography system
3 水下照明系統(tǒng)設計
該水下照明系統(tǒng)主要用于配合水下高速相機拍攝水下的高速運動目標,水下高速相機的拍攝速度超過1 000 fps。照明的目標區(qū)域為4 m×30 m 的狹長區(qū)域,系統(tǒng)設備在拍攝時有可能會受到水下目標高速運動產(chǎn)生的振動和沖擊。水下照明系統(tǒng)的系統(tǒng)組成如圖2所示,主要包括包括水下LED 照明燈陣列及其安裝附件、水面轉(zhuǎn)接箱、水下照明電源配電柜、水密電纜以及岸上電纜。
考慮水下照明的特點,并結合高速攝像的要求,本水下照明系統(tǒng)重點考慮以下幾個方面:照明燈的光束角、照明燈的總功率、照明燈的部署距離、照明區(qū)域要求達到的照度。
3.1 照明燈的部署距離
照明燈與目標面的距離直接關系到照明的整體效果,由于水體的散射和吸收,水下照明對照射距離十分敏感。燈具與目標越近,衰減越小,目標受光面所獲得的照度越高,對高速成像就越有利[6-7]。但是,燈具過于靠近目標則容易受到高速運動目標的沖擊,嚴重時有可能損壞燈具。因此,根據(jù)攝像系統(tǒng)的照度要求以及燈具總功率的推算,確定燈具安裝位置距目標面為5 m。
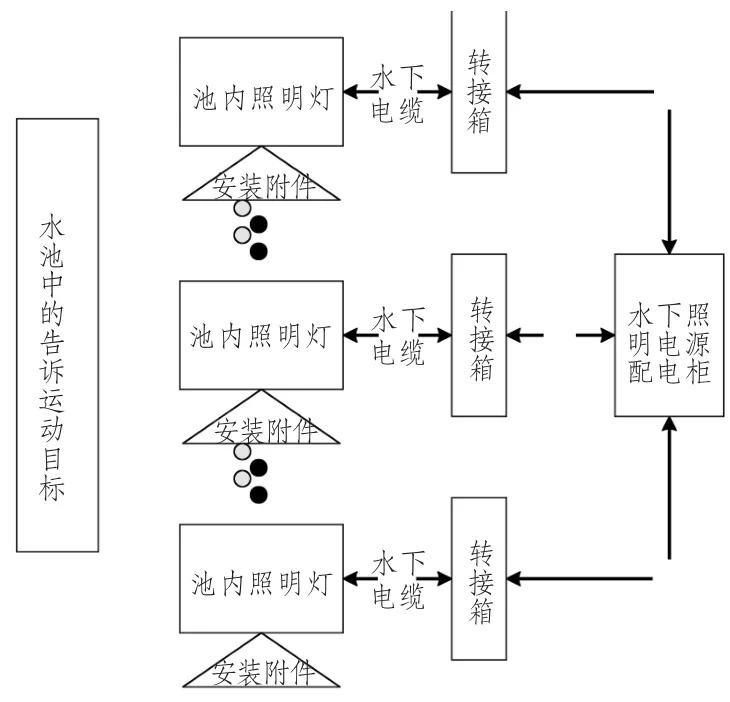
圖2 水下照明系統(tǒng)原理圖Fig.2 Diagram of underwater lighting system
3.2 目標區(qū)域的照度
對于高速相機與水下照明系統(tǒng)而言,另一個重要的方面是水下高速相機的感光度(靈敏度)和目標區(qū)域水下照明的照度(或亮度)的配合。經(jīng)過多次的試驗驗證并結合關于在一定高速攝像速率、一定高速相機靈敏度、一定拍攝距離(如上面建議的5 m距離)條件下的科學計算,高速相機的感光度在6 000 ~10 000 ISO 條件下,在拍攝速率1 500 ~2 000 fps 時,高速相機正對目標區(qū)域的照度如果達到200 ~400 lx 以上將會產(chǎn)生良好的高速攝像拍攝效果。因此,目標區(qū)域的平均照度要求不低于400 lx。
3.3 照明燈的光束角及部署
燈具光束角的設計與燈具陣列的排列及攝像機的安裝位置應綜合考慮,盡量減小水下光線散射對攝像的影響[7]。本文的照明方案如圖3所示,在垂直方向上,每盞池內(nèi)照明燈的光束角為30°,照明燈距離目標面5 m,水下照明燈覆蓋30 m 的垂直區(qū)域。左右2排照明燈陣列交叉布置在高速相機的兩側,左側部署12 盞光束角為30°的照明燈,右側部署12 盞光束角為30°的照明燈,這樣可以完整覆蓋30 m 的垂直區(qū)域。左側照明燈與右側照明燈之間的高度錯開1.2 m,這樣兩側的照明燈均存在水平和垂直面上的照明區(qū)域交叉,從而盡量做到照明的均勻。
在水平方向上,將照明燈部署在距目標中心5 m的圓周邊,根據(jù)相關的光學計算(照度、均勻性)結果,適當對照明燈的實際部署情況進行調(diào)整分析。照明燈部署在水下高速相機的兩側,照明燈可以與高速相機部署在同側,也可以在控制直射光的條件下,將照明燈部署在高速相機的對面兩側。

圖3 照明燈部署圖Fig.3 Dispose of LED arrays
4 光學仿真
本水下照明系統(tǒng)總共部署24 盞池內(nèi)照明燈,每盞照明燈的功率為420 W,已知照明距離、目標面照度要求,就可以通過光學計算工具和光學建模對各參數(shù)進行更改、優(yōu)化。圖4 為光學仿真的流程圖。圖5 為水下照明燈反光杯的光學特性曲線。
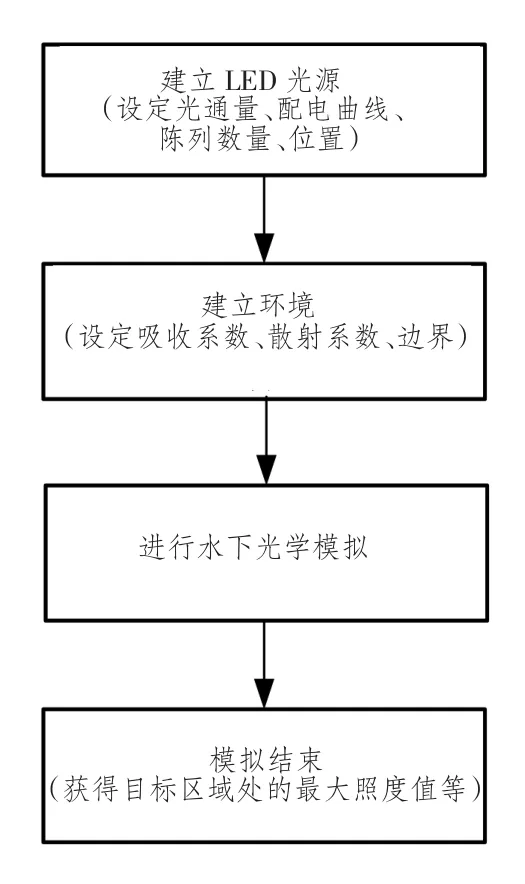
圖4 光學仿真流程圖Fig.4 Flowchart of Optical simulation
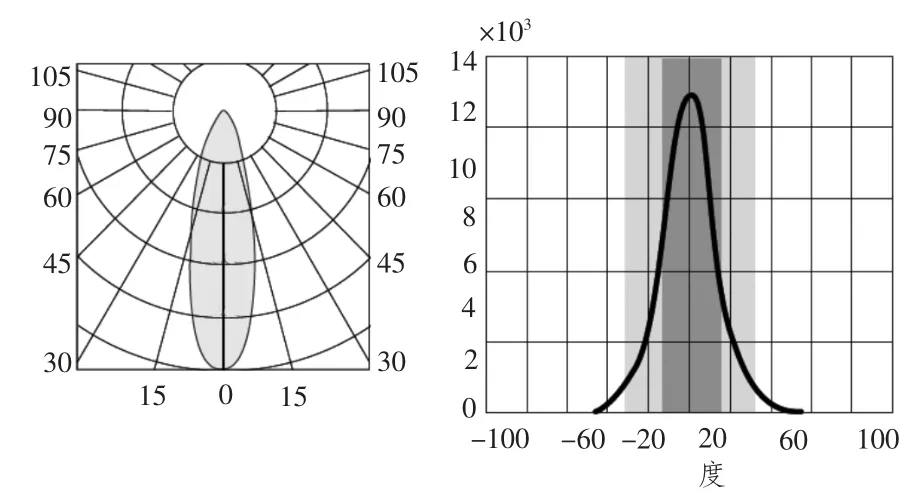
圖5 反光杯的光學特性曲線Fig.5 Optical characteristic of curve reflecting cup
4.1 單盞燈具垂直照明特性
4 個約100 W 的LED 組成模塊與目標面的垂直距離為7 m 時,LED 陣列垂直照明在目標面上的照度如圖6所示,在目標區(qū)域內(nèi)的收光效率為96.5%。
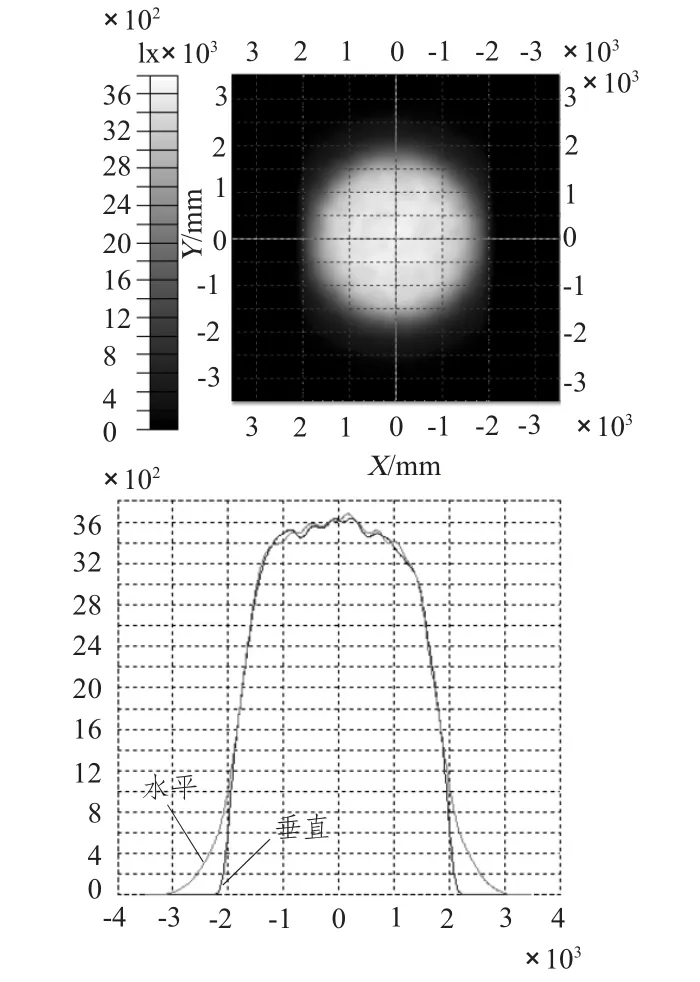
圖6 LED 垂直照射時目標面上的照度圖(L=7 m)Fig.6 LED array vertical illumination in the target surface illumination map(L=7 m)
4.2 單盞燈具斜向照明特性
當LED 陣列與目標面的距離為7 m,并且與目標面法線的夾角為30°,在目標面上形成的照度分布如圖7所示。從圖中可以看出,其照度分布左右不均勻,左邊的照度明顯高于右邊照度,光通量為35 775 lm,到達目標面上的效率為91.6%。圖8 為在照明距離為5 m 下形成的照度分布圖,比較可看出,在照明距為5 m 的情況下,照明光斑無法充滿整個4 m 寬的目標區(qū)域,因此若采用照明距5 m,會導致均勻性下降。
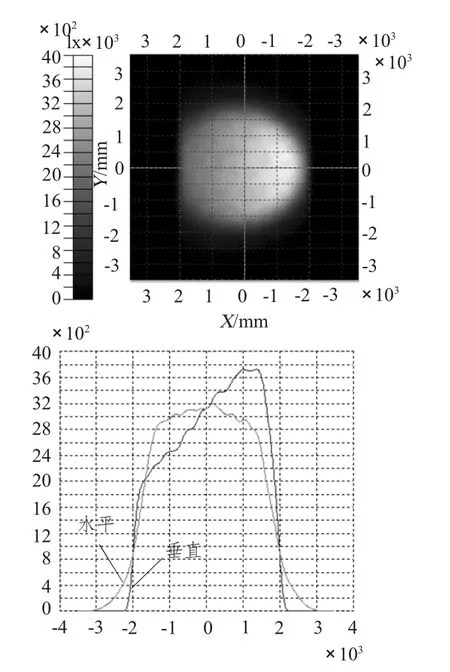
圖7 LED 斜照明在目標面上的照度圖(L=7 m)Fig.7 LED array oblique illumination in the target surface illumination map(L=7 m)
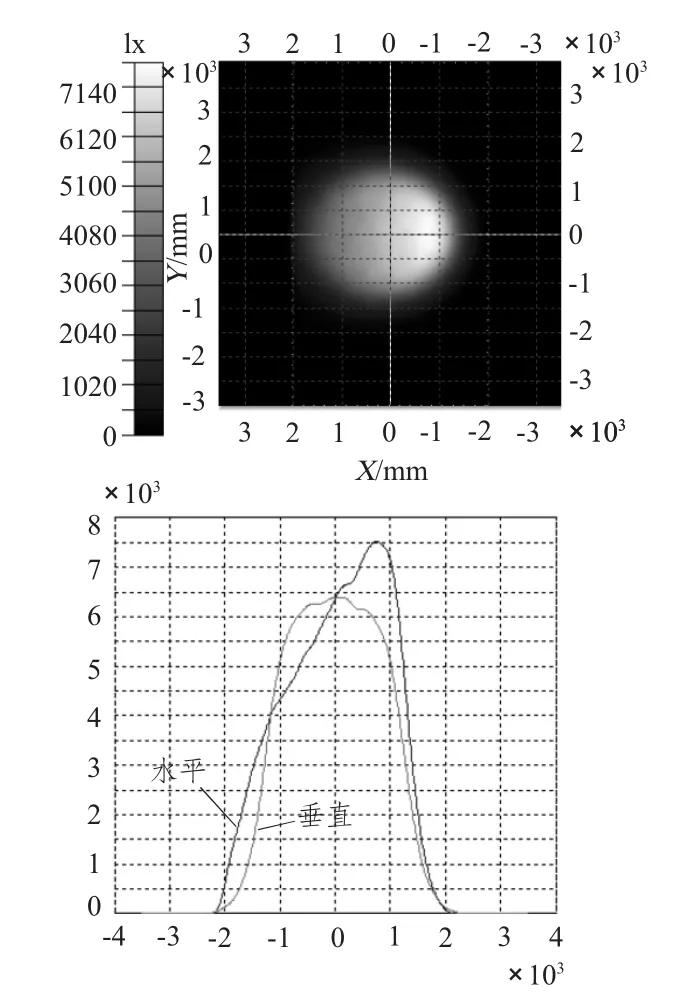
圖8 LED 斜照明在目標面上的照度圖(L=5 m)Fig.8 LED array oblique illumination in the target surface illumination map(L=5 m)
4.3 燈具陣列照明
圖9 為多排LED 陣列斜照明系統(tǒng)結構圖,一側LED 燈具為12 個,另一側LED 燈具為11 個。照明燈從兩側斜±30°入射到目標面上。圖10 為在4 m×30 m 大小的目標面上形成的照度圖,平均照度值為7 178.6 lx,最小照度為5 800.2 lx,均勻性為80.8%,最終到達該目標區(qū)域上的光效率為88.7%。從圖11 可看出,在目標面中心照度最高,而邊緣區(qū)域的照度下降較為緩慢。
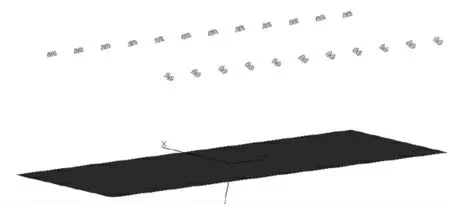
圖9 多排LED 陣列斜照明系統(tǒng)示意圖Fig.9 Schematic diagram of multiple rows LED array oblique incident illumination system
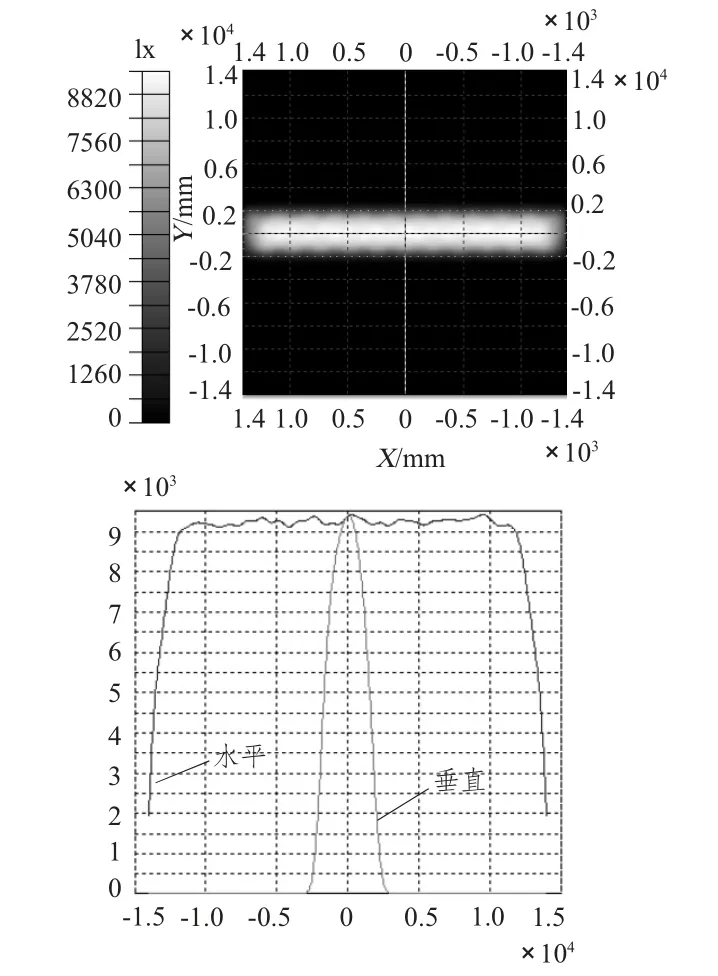
圖10 LED 陣列斜照明在目標面上的照度圖(照明距離7 m,30°傾角入射)Fig.10 LED array oblique illumination in the 4 m×30 m target surface illumination map(L=7 m,angle 30)
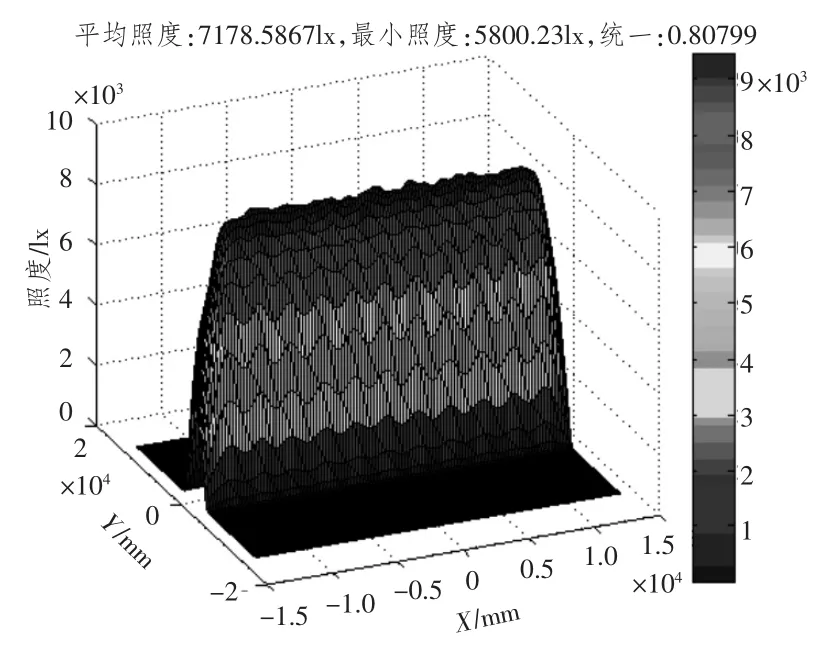
圖11 照度分布圖Fig.11 Illuminance distribution map
照明燈從兩側斜±45°入射到目標面上。圖12為在4 m×30 m 大小的目標面上形成的照度圖,平均照度值為6 480.3 lx,最小照度為5 527.2 lx,均勻性為85.3%,最終到達該目標區(qū)域上的光效率為79.8%。從圖13 可以看出,在目標面中心照度最高,而邊緣區(qū)域的照度下降較為緩慢。
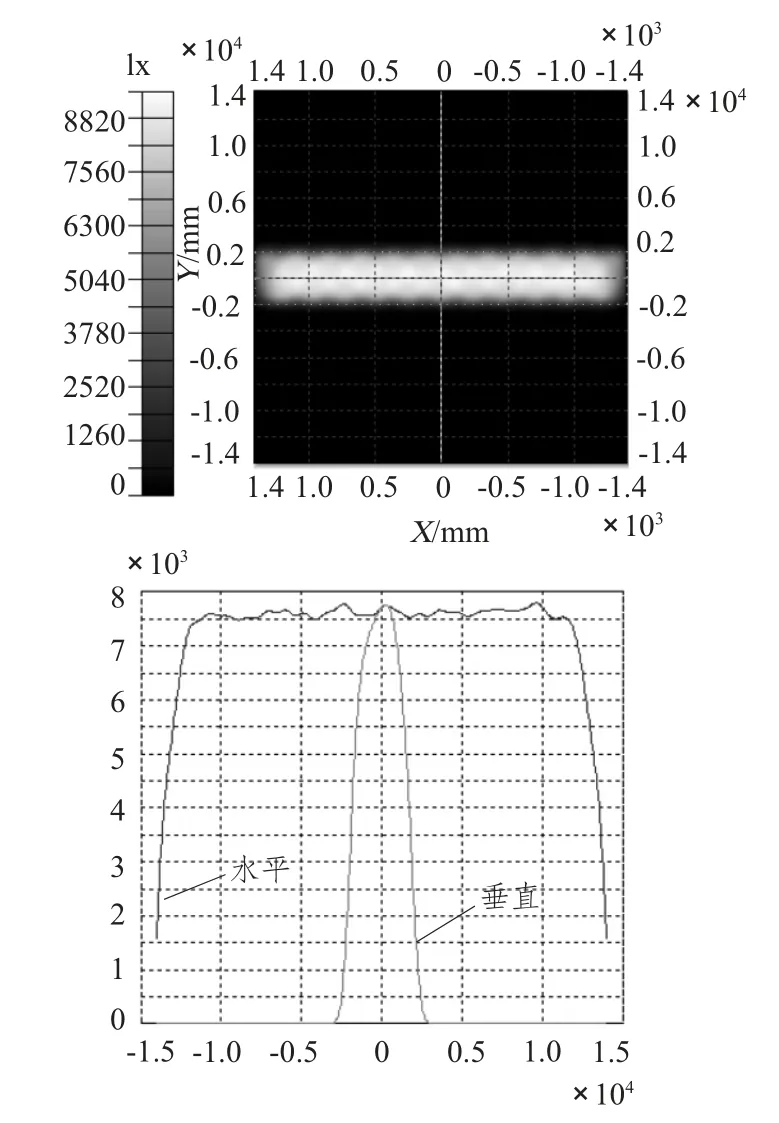
圖12 LED 陣列斜照明在目標面上的照度圖(照明距離7 m,45°傾角入射)Fig.12 LED array oblique illumination in the 4 m×30 m target surface illumination map(L=7 m,angle 45°)
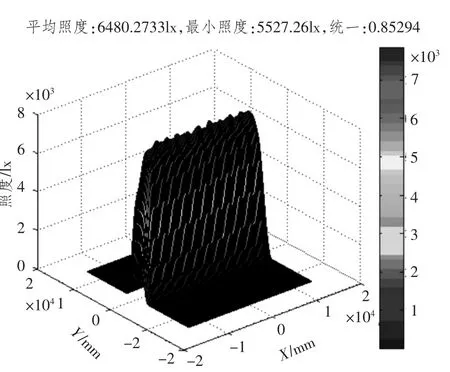
圖13 照度分布圖Fig.13 Illuminance distribution map
系統(tǒng)仿真總效率估算如表1所示。
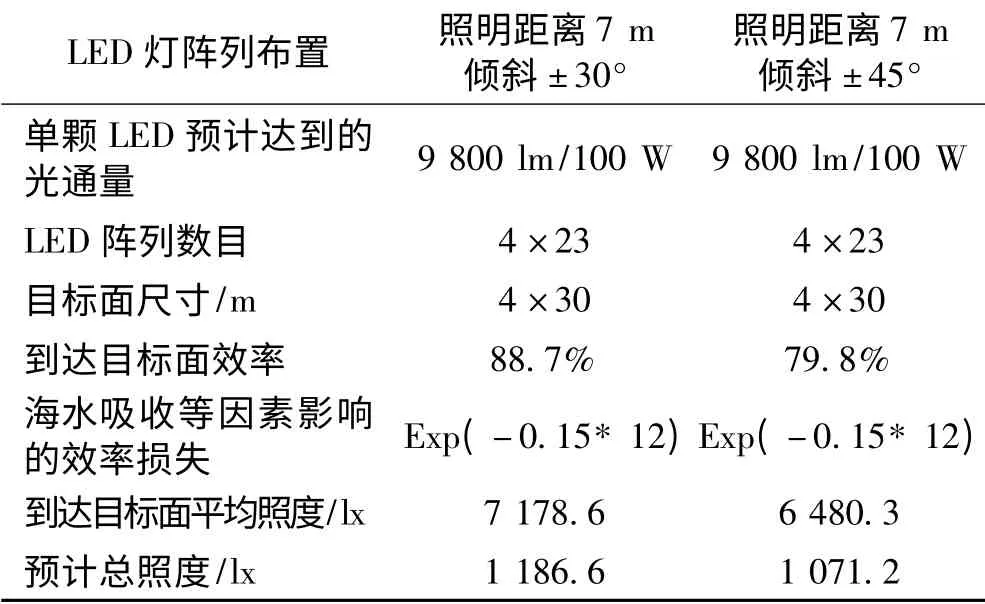
表1 系統(tǒng)仿真總效率估算Tab.1 Estimate the total efficiency of system simulation
5 試驗與結果
在某水池內(nèi)進行了水下高速攝像照明系統(tǒng)試驗。試驗的相機為美國IDT 公司的Y3-S1 高速相機,鏡頭為最大光圈為F/1.8 的水下專用鏡頭,照明燈為400 W 的水下LED。進行了不同目標距離不同入射方向角、順光、逆光條件下的試驗,圖14 為照射距離分別為5 m和7 m 時高速相機拍攝到的圖像。從試驗結果來看,相同的照明燈,相同的照射距離,對于與拍攝水中氣泡來說逆?zhèn)裙馀臄z的效果比順測光的效果好。
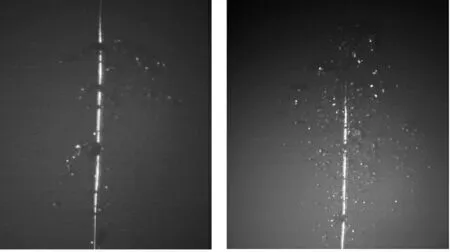
圖14 水下高速攝像系統(tǒng)試驗拍攝到的照片F(xiàn)ig.14 Images of underwater high-speed camera system test
6 結 語
LED 取代現(xiàn)有的光源已是當今的發(fā)展趨勢,在室內(nèi)照明、路燈、車燈及其他領域都有許多設計的案例,在水下照明領域相關的研究和討論還較少[5,8]。
針對水下光學的性質(zhì)和水下照明的特點,本文提出了基于LED 的水下目標高速攝像照明系統(tǒng)方案并對某典型水下高速攝像照明系統(tǒng)進行了詳細設計。對不同配置的LED 陣列進行了光學計算及仿真,得出了最佳的照射距離及光源角度配置。水下高速攝像系統(tǒng)試驗結果為大范圍水下高速運動目標觀測照明系統(tǒng)設計提供了參考。
[1]沈凌敏,何俊華,張琦,等.水下微光高速攝像系統(tǒng)在潛艇試驗中的應用[J].艦船科學技術,2009,31(11):55-58.
SHEN Ling-min,HE Jun-hua,ZHANG Qi,et al.Application of underwater low-light-level high-speed photograph system in submarine[J].Ship Science and Technology,2009,31(11):55-58.
[2]汪斌,張光升,高寧,等.高速攝影技術在水下爆炸氣泡脈動研究中的應用[J].含能材料,2010,18(1):102-106.
WANG Bin,ZHANG Guang-sheng,GAO Ning,et al.Application of high-speed photography in bubble oscillation at underwater explosion[J].Chinese Journal of Energetic Materials,2010,18(1):102-106.
[3]洪江波,李海濤,朱錫,等.水下爆炸的高速攝影測試技術研究[J].武漢理工大學學報,2008,30(05):82-86.
HONG Jiang-bo,LI Hai-tao,ZHU Xi,et al.High-speed photographic investigation of bubble induced by underwater explosion[J].Journal of Wuhan University of Technology,2008,30(5):82-86.
[4]孫傳東,陳良益,高立民,等.水的光學特性及其對水下成像的影響[J].應用光學,2000,21(4):39-46.
SUN Chuan-dong,CHEN Liang-yi,GAO Li-min,et al.Water optical properties and their effect on underwater imaging[J].Journal of Applied Optics,2000,21(4):39-46.
[5]樓志斌.半導體照明技術在水下探測設備中的應用研究[J].船舶工程,2011,33(6):12-14.
LOU Zhi-bin.Research & application of solid state lighting in underwater exploration equipment[J].Ship Engineering,2011,33(6):96-99.
[6]張法全,王國富,葉金才,等.水下光學監(jiān)控系統(tǒng)照明方式的研究[J].光子學報,2011,40(7):1061-1065.
ZHANG Fa-quan,WANG Guo-fu,YE Jin-cai,et al.Lighting pattern of underwater optical monitoring system[J].Acta Photonica Sinica,2011,40(7):1061-1065.
[7]張利,孫傳東,何俊華.光源角度配置對水下成像圖像質(zhì)量影響的研究[J].應用光學,2010,31(4):579-583.
ZHANG Li,SUN Chuan-dong,HE Jun-hua.Impact of light source angle on imaging quality of underwater imaging systems[J].Journal of Applied Optics,2010,31(4):579-583.
[8]SHEN S C,HUANG H J,CHAO C C,et al.Design and analysis of a high-intensity LED lighting module for underwater illumination[J].Applied Ocean Research,2013(39):89-96.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44