液壓作動(dòng)器的全局滑模控制研究
2014-12-19 01:46:08鄭春勝
制造業(yè)自動(dòng)化 2014年15期
孫 璐,鄭春勝
SUN Lu, ZHENG Chun-sheng
(北京航天自動(dòng)控制研究所,北京 100854)
0 引言
液壓作動(dòng)器具有高功率重量比、高剛度、高負(fù)載能力等優(yōu)點(diǎn),因而在機(jī)器人、大型機(jī)械設(shè)備、航空航天等領(lǐng)域得到了廣泛應(yīng)用。然而,液壓作動(dòng)器系統(tǒng)是一種典型的參數(shù)不確定非線性系統(tǒng),其閥控動(dòng)力機(jī)構(gòu)流量非線性對(duì)系統(tǒng)性能影響較大,且時(shí)變、外負(fù)載干擾及非線性因素也導(dǎo)致了系統(tǒng)模型參數(shù)很大程度的不確定性。
由于液壓作動(dòng)器模型的非線性和參數(shù)不確定性,傳統(tǒng)的PID控制算法已經(jīng)很難滿足液壓作動(dòng)器高精度、高速度的控制要求,各國(guó)學(xué)者針對(duì)液壓作動(dòng)器的特性也在不斷研究新的控制策略和方法。模糊控制[1]和神經(jīng)網(wǎng)絡(luò)控制[2]已經(jīng)在液壓作動(dòng)器的控制上得到了應(yīng)用,但是他們?cè)诳刂七^(guò)程中,對(duì)外負(fù)載變化和擾動(dòng)的抑制效果欠佳。滑模控制[3]是一種非線性控制方法,其對(duì)于系統(tǒng)不確定性及外擾動(dòng)具有較強(qiáng)的自適應(yīng)性,傳統(tǒng)的滑模控制系統(tǒng)包括趨近模態(tài)和滑動(dòng)模態(tài),但系統(tǒng)在趨近模態(tài)時(shí)對(duì)系統(tǒng)參數(shù)攝動(dòng)和外部干擾比較敏感,因此系統(tǒng)的動(dòng)態(tài)性能和魯棒性受到一定限制。針對(duì)傳統(tǒng)滑模控制的不足,Lu[4]等提出了一種全局滑模控制器,設(shè)計(jì)新的滑模面來(lái)消除滑模控制趨近運(yùn)動(dòng)階段,克服了系統(tǒng)非線性,時(shí)變等因素影響。
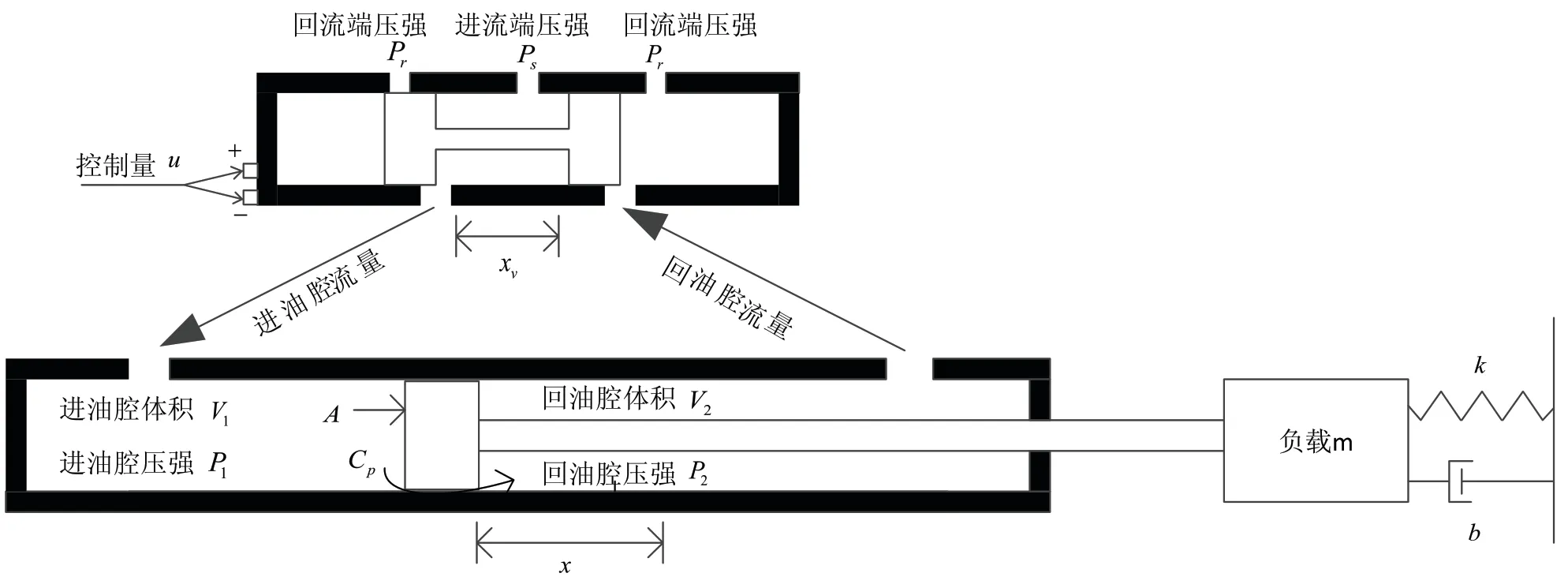
圖1 液壓作動(dòng)器示意圖
首先建立了液壓作動(dòng)器的數(shù)學(xué)模型,深入分析了模型的非線性特性及模型中各參數(shù)變化范圍,在此基礎(chǔ)上,推導(dǎo)了一種全局滑模控制算法,設(shè)計(jì)新的滑模面來(lái)消除滑模控制趨近運(yùn)動(dòng)階段,很好的克服了系統(tǒng)非線性,時(shí)變等因素的不良影響,提高了液壓作動(dòng)器的控制性能。最后通過(guò)仿真實(shí)驗(yàn)驗(yàn)證了上述方法的正確性和有效性。
1 液壓作動(dòng)器建模
液壓作動(dòng)器由電液伺服閥和對(duì)稱缸組成,液壓作動(dòng)器活塞連接負(fù)載,負(fù)載與環(huán)境的接觸為彈簧阻尼模型,液壓作動(dòng)器工作原理[5]如圖1所示。
整個(gè)液壓作動(dòng)器系統(tǒng)負(fù)載力平衡方程如下:

其中:x表示負(fù)載位移,m表示負(fù)載質(zhì)量,A表示液壓作動(dòng)器腔體表面積,p1表示進(jìn)油腔壓強(qiáng),p2表示回油腔壓強(qiáng),b表示負(fù)載與環(huán)境接觸速度阻尼系數(shù),k表示負(fù)載與環(huán)境接觸彈性系數(shù),F(xiàn)(t)表示外部干擾力與未建模摩擦力等。
根據(jù)液壓作動(dòng)器的流量連續(xù)方程:
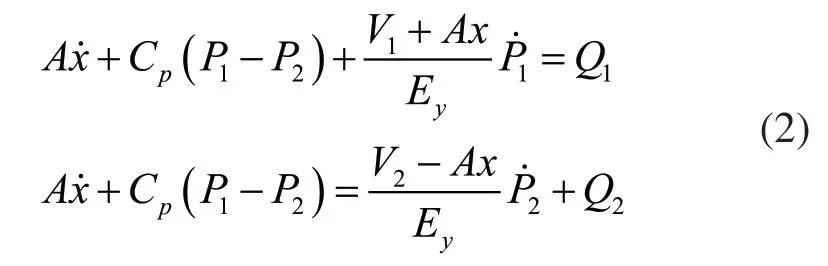
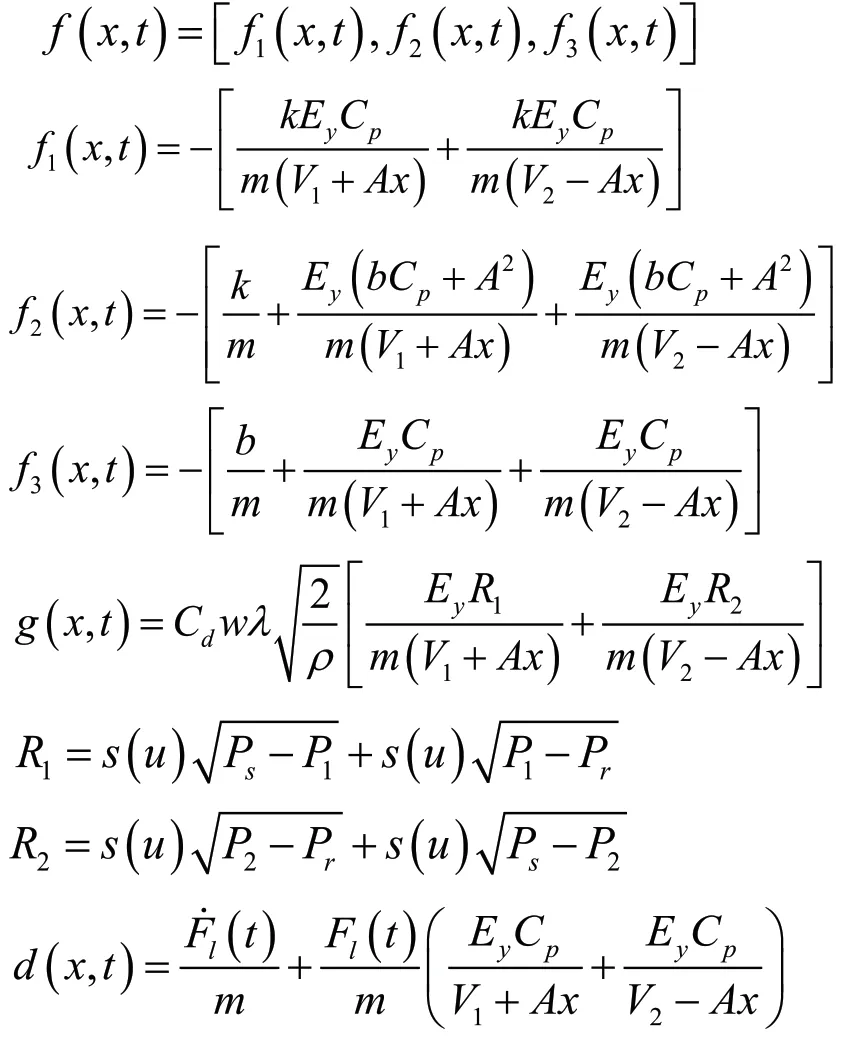
其中:V1表示初始時(shí)刻進(jìn)油腔體積,V2表示初始時(shí)刻回油腔體積,Cp表示液壓作動(dòng)器內(nèi)漏系數(shù),Ey表示液壓作動(dòng)器等效容積彈性模數(shù),Q1表示進(jìn)油腔流量,Q2表示回油腔流量,分別為:
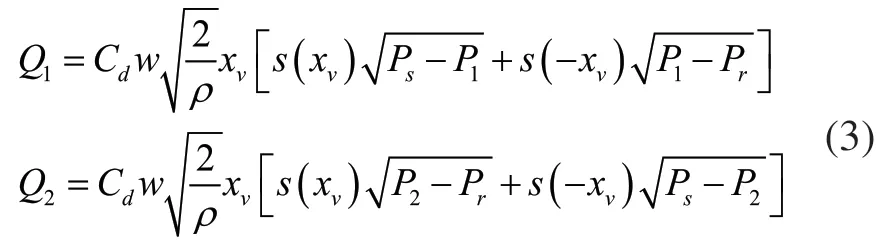
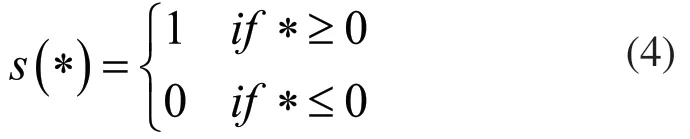
其中:Cd表示流量系數(shù),w表示閥芯面積梯度,ρ 表示流體密度,xv表示閥位移,可用xv=λu表示[6],其中,u 表示控制量,λ表示放大系數(shù)。定義:
其中
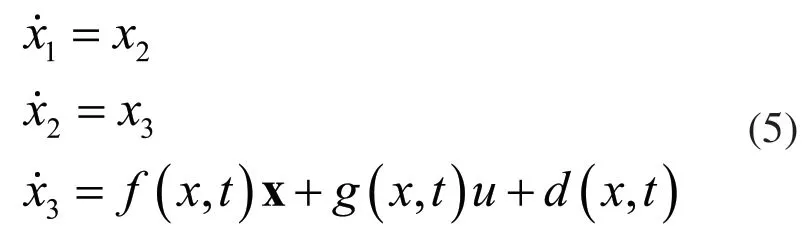
2 全局滑模控制器設(shè)計(jì)
從式(5)得到,液壓作動(dòng)器為一非線性系統(tǒng),并且Ey,Cy和Cd參數(shù)由于不同的溫度和環(huán)境,在系統(tǒng)運(yùn)行整個(gè)過(guò)程中不斷變化,w 和ρ也是不斷變化的參數(shù),由于運(yùn)動(dòng)過(guò)程中負(fù)載也可能不斷變化,因此m,k和b也在不斷變化。因此對(duì)于整個(gè)系統(tǒng)而言,其為一參數(shù)不確定的非線性系統(tǒng)。但是由于各參數(shù)均具有實(shí)際物理含義,在系統(tǒng)運(yùn)行過(guò)程中,參數(shù)大小不存在突變情況,因此在實(shí)際物理系統(tǒng)中可作如下假設(shè)。



其中1c、c2均為正的常數(shù)。全局滑模控制的全局切換函數(shù)[7]與傳統(tǒng)滑模控制切換函數(shù)的區(qū)別是式(8)右側(cè)的全程滑態(tài)因子 w(t)必須滿足以下三個(gè)條件:1);2)t →∞時(shí),w(t )→∞;3)w(t)具有一階導(dǎo)數(shù)。
根據(jù)以上三個(gè)條件,設(shè)計(jì) w(t)為:


其中uc為等效控制,uvss為切換控制。

為了消除抖振,可采用飽和函數(shù)方法,即用sat(s)代替sgn(s)。
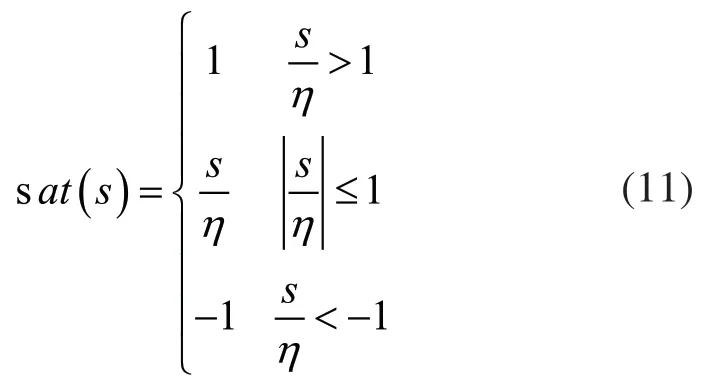
其中η為很小的正常數(shù)。
3 仿真分析
通過(guò)以上理論分析,采用全局滑模控制器進(jìn)行液壓作動(dòng)器位置伺服控制仿真實(shí)驗(yàn)。控制頻率設(shè)為1000Hz,為進(jìn)行伺服閥過(guò)流保護(hù),限制控制電壓輸入在-10V~+10V之間,進(jìn)油壓強(qiáng)30MPa,回油壓強(qiáng)0MPa,環(huán)境剛度K為5000N/m,阻尼系數(shù)b為50Ns/m,Ey為700MPa,Cp為10-15(m3s/Pa),A為4.14×10-3m3,V1為2.1×10-4m3,V2為3.2×10-4m3,。
假設(shè)負(fù)載質(zhì)量從100Kg變化到1000Kg,根據(jù)上述系統(tǒng)參數(shù),設(shè)計(jì)控制器參數(shù)為:
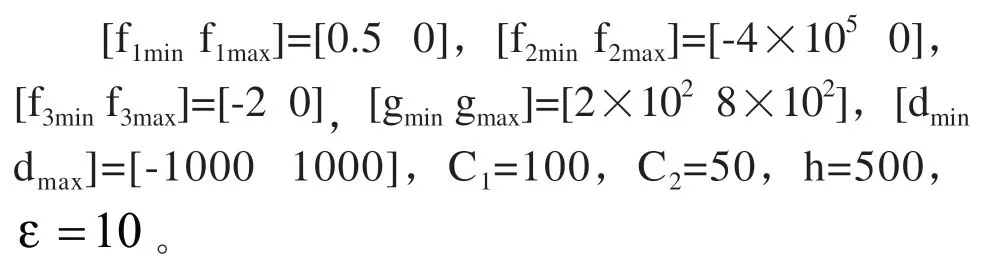
仿真分析中,采用正弦信號(hào)作為系統(tǒng)期望曲線,對(duì)比分析不同幅值、不同頻率的期望信號(hào)輸入時(shí),不同負(fù)載情況下系統(tǒng)響應(yīng)性能。進(jìn)行了8組實(shí)驗(yàn),分別是負(fù)載為100kg和1000kg時(shí),系統(tǒng)對(duì)幅值為5mm、20mm,頻率為0.6365Hz、2Hz的正弦信號(hào)跟蹤情況,得到的實(shí)際位置曲線和期望位置曲線如圖2~圖9所示。
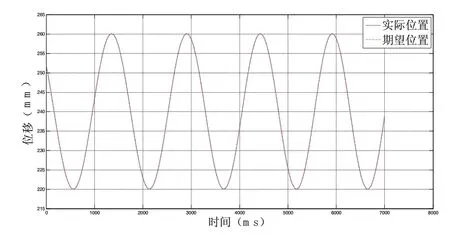
圖2 0.6535Hz,1000kg,20mm
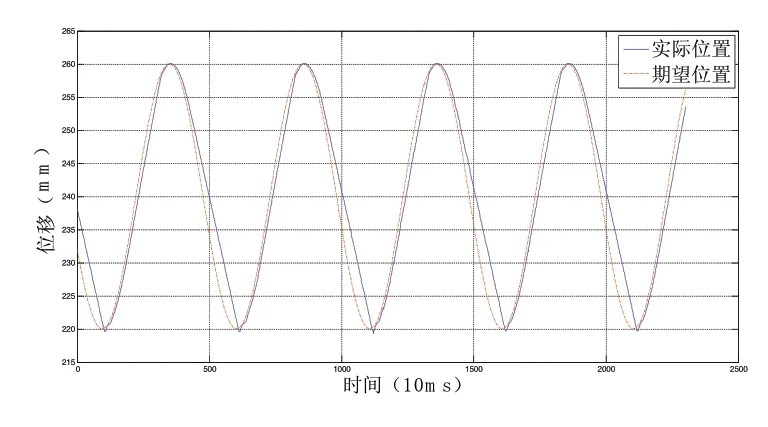
圖3 2Hz,1000kg,20mm
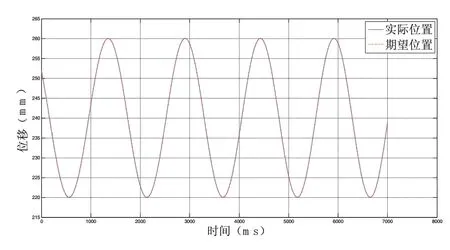
圖4 0.6535Hz,100kg,20mm
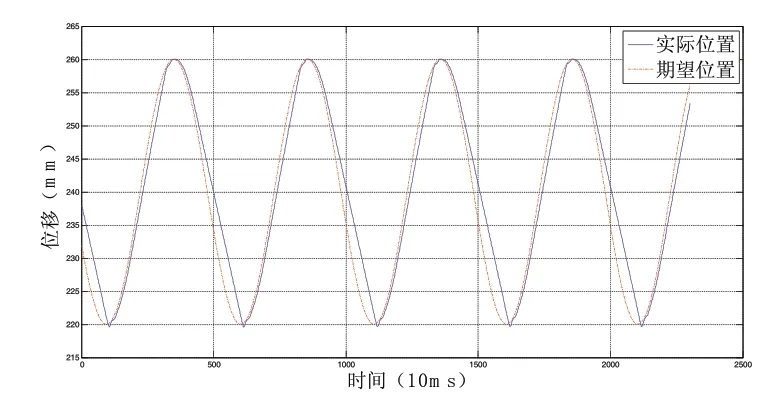
圖5 2Hz,100kg,20mm
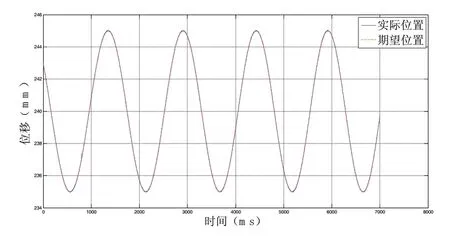
圖6 0.6535Hz,1000kg,5mm
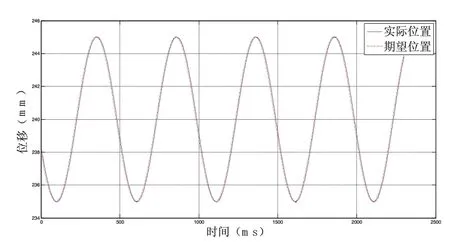
圖7 2Hz,1000kg,5mm
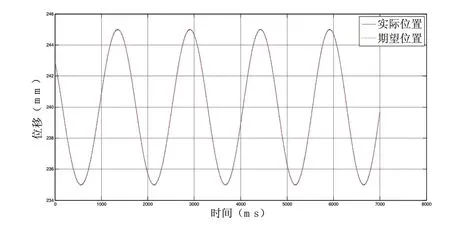
圖8 0.6535Hz,100kg,5mm
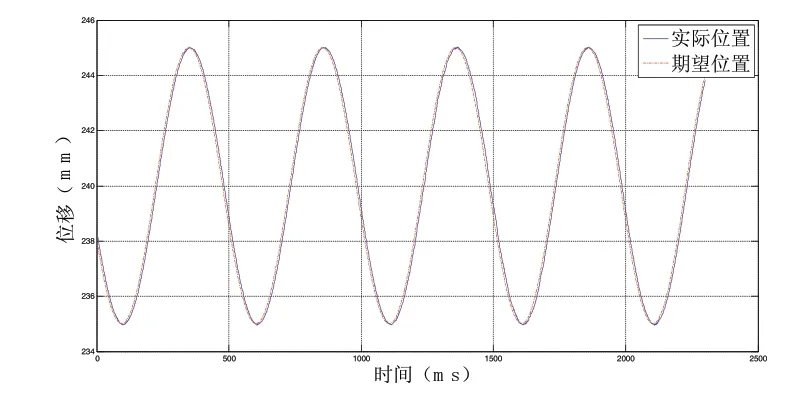
圖9 2Hz,100kg,5mm
上述圖中,橫軸代表采樣時(shí)間,單位ms,縱軸代表液壓作動(dòng)器長(zhǎng)度,單位mm。對(duì)比分析圖2、圖4,圖6、圖8,當(dāng)輸入信號(hào)頻率為0.6535Hz,幅值分別為5mm、20mm時(shí),將負(fù)載由100kg變化到1000kg,液壓作動(dòng)器都能較好的跟蹤輸入期望信號(hào),時(shí)延為5ms,跟蹤誤差為10-2量級(jí),可見運(yùn)用上述的全局滑模控制算法,使液壓作動(dòng)器位置伺服系統(tǒng)在整個(gè)響應(yīng)階段有較好的動(dòng)態(tài)性能,且有較好的負(fù)載匹配能力和抑制干擾能力。
對(duì)比分析圖3和圖5,當(dāng)輸入信號(hào)頻率為2Hz,幅值為20mm時(shí),系統(tǒng)位置伺服跟蹤存在較大時(shí)延和跟蹤誤差,這主要是由于液壓作動(dòng)器的控制量限定在[-10,+10]V之間,系統(tǒng)固有帶寬限制了跟蹤頻率為2Hz,幅值為20mm的正弦信號(hào)作動(dòng)器性能。對(duì)比分析圖7、圖9,當(dāng)輸入信號(hào)頻率為2Hz,幅值為5mm時(shí),將負(fù)載由100kg變化到1000kg,能得到較好的位置伺服效果。
4 結(jié)束語(yǔ)
由于全局滑模控制算法可以使得系統(tǒng)從任意初始狀態(tài)就被約束在滑模面內(nèi),保證控制的全過(guò)程具有滑動(dòng)模態(tài)特性,在建立了液壓作動(dòng)器動(dòng)力學(xué)方程的基礎(chǔ)上,設(shè)計(jì)了系統(tǒng)位置伺服的全局滑模控制器。仿真結(jié)果表明,全局滑模控制可以快速的實(shí)現(xiàn)全局滑動(dòng)模態(tài)運(yùn)動(dòng),具有很好的魯棒性,可以匹配外界變化負(fù)載對(duì)系統(tǒng)位置伺服的影響,同時(shí)具有較高的控制精度和較好的動(dòng)態(tài)特性。
[1]余兵,等.模糊控制及其在液壓伺服系統(tǒng)中的應(yīng)用[J].液壓與氣動(dòng),2006(10):56-64.
[2]陳平,等.液壓伺服系統(tǒng)的直接自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制[J].機(jī)床與液壓,2001(2):40-43.
[3]高為炳.變結(jié)構(gòu)控制的理論及設(shè)計(jì)方法[M].北京:科學(xué)出版社,1996.
[4]Yu-Sheng Lu,Jian-Shiang Chen.Design of a global slidingmode controller for a motor drive with bounded control[J].International Journal of Control 62:5,1001-1019.
[5]Merritt.H.E.Hydraulic control systems[M].New York,Wiley,1967.
[6]王占林.近代電氣液壓伺服控制[M].北京:北京航空航天大學(xué)出版社,2005.
[7]劉金琨.滑模變結(jié)構(gòu)控制MATLAB仿真[M].北京:清華大學(xué)出版社,2005.
[8]Cheng Guan,Shuangxia Pan.Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters[J].Control Engineering Practice,16(2008),1275-1284.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(bào)(2015年4期)2015-05-07 06:43:35
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
