彈跳機(jī)器人彈跳機(jī)構(gòu)的設(shè)計(jì)與仿真分析
2014-12-19 01:46:10馬文碩
制造業(yè)自動化 2014年15期
馬文碩,米 潔
MA Wen-shuo, MI Jie
(北京信息科技大學(xué) 機(jī)電工程學(xué)院,北京 100192)
0 引言
隨著機(jī)器人在當(dāng)今生活中的應(yīng)用越來越廣泛,替代人類發(fā)揮的作用日益重要,機(jī)器人面臨的條件也越來越惡劣,例如救災(zāi)、星際探索、軍事偵察、考古探測等,這些情形往往具有復(fù)雜的地勢,需要機(jī)器人具有良好的機(jī)動能力和越障能力。
地面機(jī)器人現(xiàn)有的移動方式多為輪式和履帶式,均具有較好的機(jī)動能力。而越過與自身大小相當(dāng)?shù)恼系K時,只有彈跳能夠做得到。目前實(shí)際彈跳機(jī)構(gòu)構(gòu)造有兩類方法[1],一類是從自然界生物的彈跳動作中獲得啟發(fā),進(jìn)行仿造,稱為仿生彈跳機(jī)構(gòu),如機(jī)械袋鼠等[2~4]。另一類方式是利用簡單機(jī)構(gòu)產(chǎn)生彈力,這種方法機(jī)構(gòu)自由度少,動力學(xué)模型簡單,實(shí)現(xiàn)相對容易。
因此設(shè)計(jì)一種運(yùn)用仿生彈跳機(jī)構(gòu)的彈跳機(jī)器人,并將其作為后續(xù)研究的動力平臺。
1 彈跳機(jī)器人的彈跳機(jī)構(gòu)設(shè)計(jì)
跳躍的實(shí)質(zhì)在于質(zhì)心具有足夠快的上升速度[5],故設(shè)計(jì)的方案是否可行的關(guān)鍵在于:彈跳機(jī)器人跳起的過程中其執(zhí)行件能否為軀體提供足夠大的速度。再而根據(jù)動量定理,因?yàn)镕t=mv2-mv1,執(zhí)行件的力越大或執(zhí)行件與地面間接觸時間越長,即沖量越大,自身獲得的動量就越大。因此動物以越大的沖量撞擊地面,所獲得的起跳速度就越大,跳起的高度就越高。
蝗蟲具有優(yōu)秀的彈跳能力[6],其跳躍具有起跳迅速、騰空持久、落地穩(wěn)定等優(yōu)點(diǎn)。當(dāng)蝗蟲的后足的腿節(jié)和脛節(jié)由褶皺狀態(tài)突然伸直時,就產(chǎn)生跳躍的動作。在腿節(jié)中生有很多斜排的肌肉用來控制脛節(jié)的活動,肌肉一端附在腿節(jié)的外骨皮上,另一端附著在腿節(jié)中一種腱筋的結(jié)構(gòu)上。當(dāng)腿節(jié)內(nèi)的肌肉收縮時便拉動這條腱筋,使脛節(jié)伸直,這時產(chǎn)生相當(dāng)大的力量撞擊地面形成跳躍[7]。蝗蟲在起跳階段釋放能量,將彈性能轉(zhuǎn)化為勢能和動能;在騰空的下降階段和著地的壓縮階段,部分動能和勢能轉(zhuǎn)化為彈性能,在跳躍過程中很好地進(jìn)行了能量的轉(zhuǎn)化和平衡。因此本方案采用模擬蝗蟲腿部跳躍機(jī)理的機(jī)構(gòu)。
在仿生領(lǐng)域中,腱、肌等被科學(xué)家認(rèn)為是昆蟲或動物跳躍動作的能量儲存和釋放機(jī)構(gòu),也稱為彈性儲能元件,任何彈簧釋放的力都與所儲存的能量成正比,與腱筋有較好的仿生一致性。
因此,如圖1所示,本方案采用四桿機(jī)構(gòu)近似代替蝗蟲各腿[8],用彈簧BD來模擬蝗蟲的腱筋。跳躍前,可通過電機(jī)驅(qū)動轉(zhuǎn)節(jié)A,繼而帶動大腿LAB轉(zhuǎn)動,拉動彈簧以儲存能量。跳躍時,彈簧拉動脛節(jié)LBE上端,使脛節(jié)LBE繞鉸鏈B瞬間轉(zhuǎn)動,從而在脛節(jié)LBE末端,即E點(diǎn)與地面間產(chǎn)生較大的蹬地力使蝗蟲實(shí)現(xiàn)跳躍。
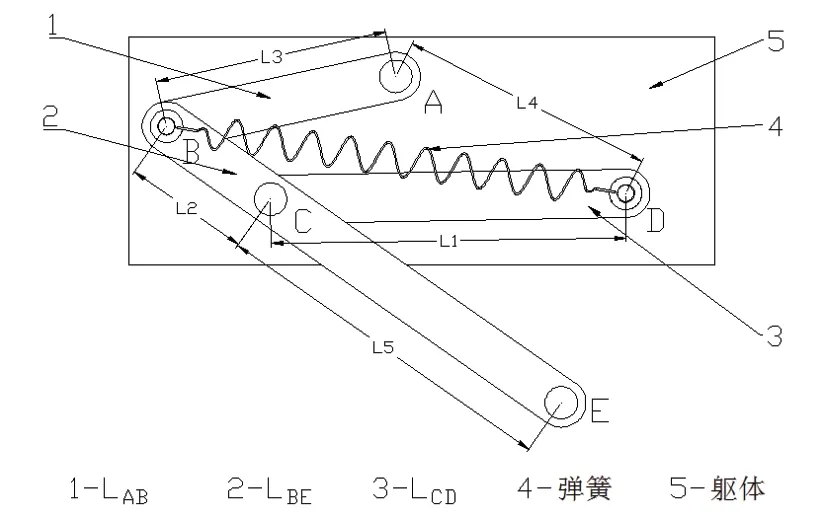
圖1 彈跳機(jī)器人彈跳機(jī)構(gòu)二維示意圖
為控制機(jī)身重量,且由于在起跳過程中腿部需要承受較大的沖擊力,故要求機(jī)身及腿部材料具有較高的韌性和較低的密度,故本方案采用環(huán)氧樹脂復(fù)合板作為樣機(jī)材料,并選用一臺直流電機(jī)作為動力源。
圖2為彈跳機(jī)器人的三維示意圖,彈跳機(jī)構(gòu)采用兩側(cè)對稱的雙四桿機(jī)構(gòu)來模擬蝗蟲的兩條腿,并用一根傳動軸將兩側(cè)的驅(qū)動轉(zhuǎn)節(jié)A相連以確保兩側(cè)的運(yùn)動一致性。驅(qū)動轉(zhuǎn)矩由電機(jī)提供,并經(jīng)由錐齒輪副將動力傳遞給傳動軸。
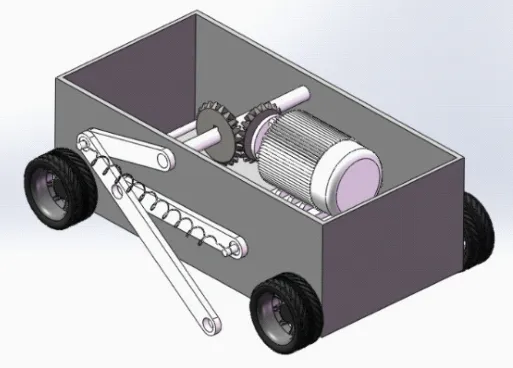
圖2 彈跳機(jī)器人彈跳機(jī)構(gòu)三維示意圖
該方案可通過調(diào)節(jié)機(jī)架桿LAD與水平方向的夾角以適應(yīng)不同的情況需要,例如:在遇到沙坑等需要跳躍水平距離較大,而對跳躍高度要求不高的情況下,可適當(dāng)減小LAD與水平方向夾角;在遇到高障礙等需要跳躍高度較大,而對跳躍水平距離不高的情況下,可適當(dāng)增大LAD與水平方向夾角。
2 基于ADAMS的彈跳機(jī)構(gòu)運(yùn)動學(xué)與動力學(xué)分析
2.1 虛擬樣機(jī)模型的建立
由于虛擬樣機(jī)技術(shù)在進(jìn)行運(yùn)動學(xué)、動力學(xué)求解時,只考慮零件的質(zhì)心和質(zhì)量,而對零件的外部形狀不予考慮。因此,要對彈跳機(jī)構(gòu)的形態(tài)結(jié)構(gòu)進(jìn)行適當(dāng)?shù)暮喕痆9]:
1)軀體外形簡化為一個長方體。
2)各關(guān)節(jié)簡化為轉(zhuǎn)動副來約束,等效實(shí)現(xiàn)二者的相對運(yùn)動。
3)將兩條腿簡化為單腿,以便于更好的進(jìn)行動力學(xué)分析。
4)各部件為剛體。
5)忽略關(guān)節(jié)摩擦。
6)將輪子省略。
根據(jù)蝗蟲的實(shí)際形態(tài)結(jié)構(gòu),按照以上原則,建立了仿蝗蟲跳躍機(jī)器人虛擬樣機(jī)模型,如圖3所示。其中各參數(shù)依次為[10]:L1=105mm,L2=35mm,L3=70mm,L4=77mm,L5=105mm,彈簧剛度K=30N/mm,彈簧原長為115mm,彈簧最大伸長量為55mm,機(jī)架LAD與水平方向夾角為153°,初始時刻LAB與水平方向夾角為187°,仿真機(jī)構(gòu)總質(zhì)量M=3kg。
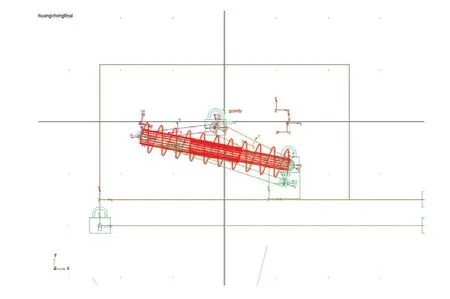
圖3 彈跳機(jī)器人彈跳機(jī)構(gòu)虛擬樣機(jī)模型
2.2 基于ADAMS的運(yùn)動學(xué)與動力學(xué)仿真
圖4中的曲線直觀地描述了在跳躍過程中仿真機(jī)構(gòu)質(zhì)心的運(yùn)動軌跡。
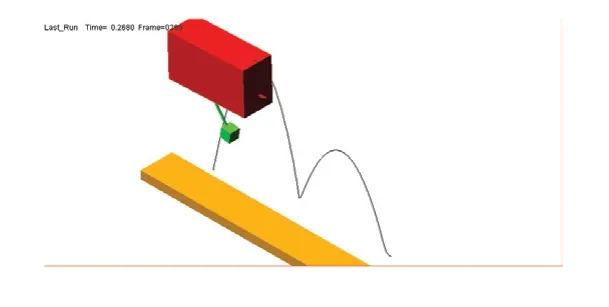
圖4 彈跳機(jī)器人運(yùn)動仿真過程
2.2.1 軀體質(zhì)心運(yùn)動參數(shù)
仿真結(jié)果如圖5所示,左方曲線為仿真機(jī)構(gòu)質(zhì)心的運(yùn)動軌跡,右上曲線為質(zhì)心在水平方向的位移曲線,右下曲線為質(zhì)心在豎直方向的位移曲線。
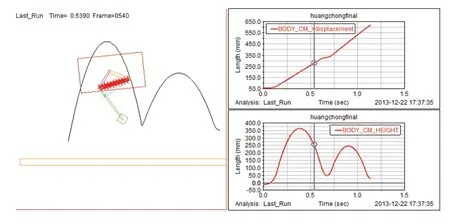
圖5 仿真機(jī)構(gòu)仿真結(jié)果
圖6為仿真機(jī)構(gòu)質(zhì)心運(yùn)動水平方向參數(shù),圖7為仿真機(jī)構(gòu)質(zhì)心運(yùn)動豎直方向參數(shù),其中實(shí)線為位移曲線,虛線為速度曲線。
蹬地起跳最大水平位移約為310mm,最大水平速度可達(dá)約575mm/s;最大高度可達(dá)約360mm,最大豎直速度可達(dá)約2300mm/s。受彈簧剛度影響,仿真機(jī)構(gòu)的速度曲線存在少許波動。
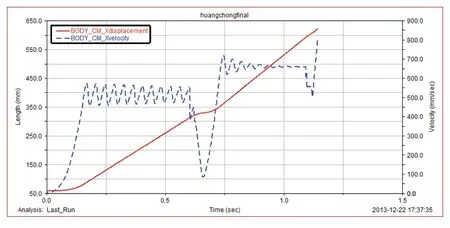
圖6 仿真機(jī)構(gòu)質(zhì)心運(yùn)動水平方向參數(shù)

圖7 仿真機(jī)構(gòu)質(zhì)心運(yùn)動豎直方向參數(shù)
為研究機(jī)架角度對彈跳機(jī)器人跳躍高度和跳躍距離的影響,現(xiàn)將原機(jī)構(gòu)的兩個參數(shù)做如下改變:機(jī)架LAD與水平方向夾角改為128°,初始時刻LAB與水平方向夾角為164°,其余參數(shù)不變,再次進(jìn)行仿真。仿真所得結(jié)果如圖8所示。
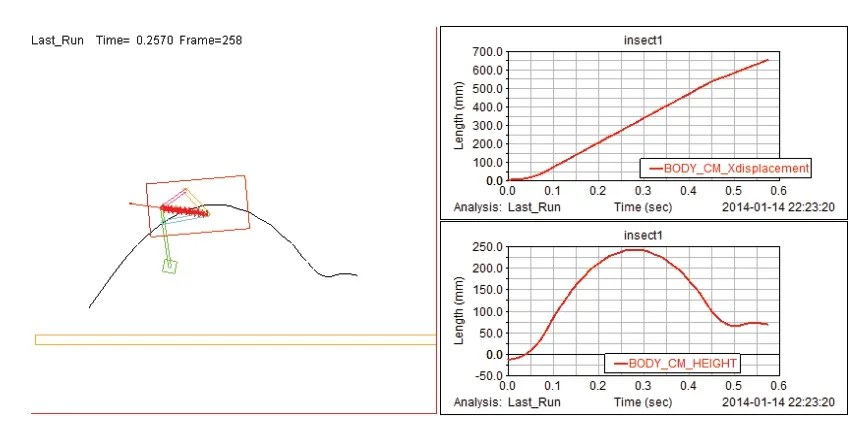
圖8 變換機(jī)架角度后的仿真結(jié)果
圖9為變換機(jī)架角度后仿真機(jī)構(gòu)質(zhì)心運(yùn)動水平方向參數(shù),圖10為變換機(jī)架角度后仿真機(jī)構(gòu)質(zhì)心運(yùn)動豎直方向參數(shù),其中實(shí)線為位移曲線,虛線為速度曲線。蹬地起跳最大水平位移約為250mm,最大水平速度可達(dá)約1450mm/s;最大高度可達(dá)約630mm,最大豎直速度可達(dá)約1900mm/s。
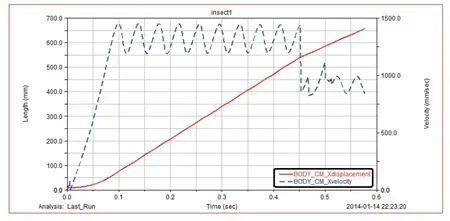
圖9 變換機(jī)架角度后仿真機(jī)構(gòu)質(zhì)心運(yùn)動水平方向參數(shù)
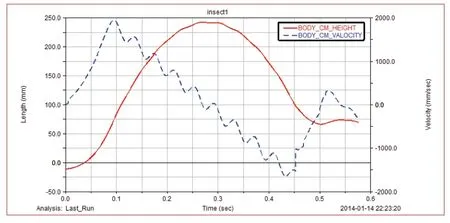
圖10 變換機(jī)架角度后仿真機(jī)構(gòu)質(zhì)心運(yùn)動豎直方向參數(shù)
2.2.2 腳部姿態(tài)與受力分析
如圖11所示,下方曲線為仿真機(jī)構(gòu)腳部(即E點(diǎn))的軌跡曲線,其中近似直線部分為彈跳時腳部蹬地動作,曲線部分為跳起后的收腿動作。由于蹬地動作非常接近直線,所以該機(jī)構(gòu)在彈跳過程中具有動作平穩(wěn),力的傳遞效率高等優(yōu)點(diǎn)。
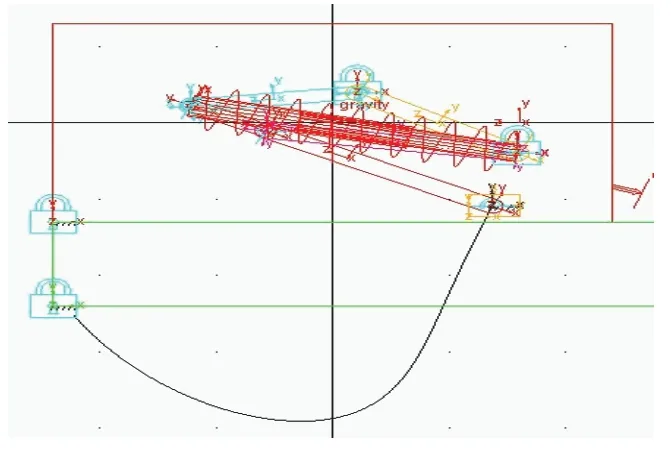
圖11 彈跳機(jī)構(gòu)腳部姿態(tài)曲線
圖12為仿真機(jī)構(gòu)起跳時腳部的受力情況,其中實(shí)線為腳部在X方向的受力,虛線為腳部在Y方向的受力,可見X方向最大蹬地力約為29.4N,Y方向最大蹬地力約為141.4N。
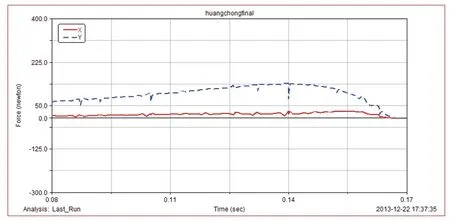
圖12 仿真機(jī)構(gòu)起跳時腳部受力情況
圖13為仿真機(jī)構(gòu)在仿真全過程中腳部(即E點(diǎn))的受力情況,在落地瞬間受力約為15kN,可見該方案的又一優(yōu)勢是落地時由于彈簧壓縮,對軀體起到了緩沖和減震的作用,防止在落地過程中使軀體受損。
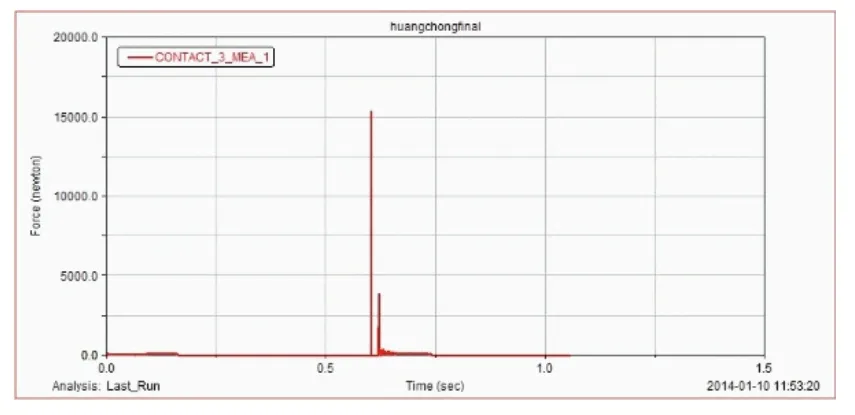
圖13 仿真全過程中腳部的受力情況
將機(jī)架LAD與水平方向夾角變換為128°時,仿真機(jī)構(gòu)起跳時腳部的受力曲線如圖14所示。其中實(shí)線為腳部在X方向的受力,虛線為腳部在Y方向的受力,X方向最大蹬地力約為62.6N,Y方向最大蹬地力約為126.3N。

圖14 變換機(jī)架角度后仿真機(jī)構(gòu)起跳時腳部蹬地力
可見在機(jī)架LAD與水平方向夾角減小的過程中,仿真機(jī)構(gòu)腳部在Y方向受力的最大值減小,在X方向受力的最大值增大,因此機(jī)架LAD與水平方向夾角不能無限減小,否則當(dāng)X方向蹬地力遠(yuǎn)大于腳部與地面間動摩擦力時,會在起跳過程中出現(xiàn)嚴(yán)重的打滑。
2.2.3 電機(jī)驅(qū)動力分析
彈跳機(jī)器人在跳躍前,需通過電機(jī)驅(qū)動大腿LAB轉(zhuǎn)動,拉動彈簧以儲存能量。因此需對轉(zhuǎn)節(jié)A進(jìn)行受力分析。
仿真機(jī)構(gòu)的驅(qū)動件即電機(jī)的驅(qū)動力矩曲線如圖15所示,最大驅(qū)動力矩為23765.484N·mm。
3 結(jié)束語
1)彈跳機(jī)器人的彈跳機(jī)構(gòu)采用仿蝗蟲腿的四桿機(jī)構(gòu),能夠使小車的跳躍過程平穩(wěn)可靠、控制簡單。在實(shí)際應(yīng)用中,可將機(jī)架LAD旋轉(zhuǎn)一定角度來改變起跳曲線的角度,以使小車能夠應(yīng)對不同類型的障礙。在落地過程中彈跳機(jī)構(gòu)能夠?qū)圀w起到緩沖的作用。
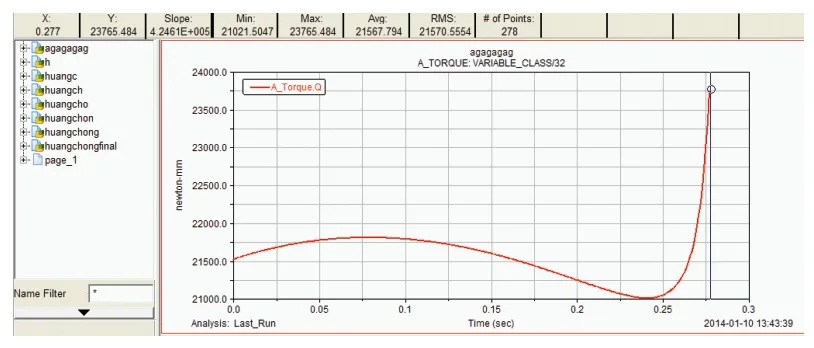
圖15 電機(jī)對大腿AB的驅(qū)動力矩
2)建立了彈跳機(jī)器人的彈跳機(jī)構(gòu)的三維模型與虛擬樣機(jī)模型,并對其進(jìn)行了基于ADAMS的運(yùn)動學(xué)與動力學(xué)分析,驗(yàn)證了彈跳機(jī)構(gòu)采用仿生機(jī)構(gòu)的可行性。
3)通過仿真驗(yàn)證了設(shè)計(jì)的合理性,彈跳機(jī)器人具有良好的彈跳性能,跳躍高度可達(dá)約360mm,跳躍距離可達(dá)約310mm。變換機(jī)架角度后跳躍高度可達(dá)約250mm,跳躍距離可達(dá)約630mm。
[1]劉壯志,席文明,朱劍英,等.彈跳式機(jī)器人研究[J].機(jī)器人,2003,25(6):568-573.
[2]鄭笑梅.裝上發(fā)條的間諜[J].國外科技動態(tài),2000,367:35-35.
[3]Hale E,Schara N,Burdick J,et al.A minimally actuated hopping rover for exploration of celestial bodies[A].Robotics and Automation,2000.Proceedings.ICRA’00.IEEE International Conference on.IEEE[C].2000,1:420-427.
[4]Okubo O H,Nakano E,Handa M.Design of a jumping machine using self-energizing spring[A].Intelligent Robots and Systems’96,IROS 96,Proceedings of the 1996 IEEE/RSJ International Conference on.IEEE[C].1996,1:186-191.
[5]張文濤,葛文杰,李建華,等.“袋鼠”跳躍機(jī)器人動力系統(tǒng)方案設(shè)計(jì)與研究[J].機(jī)器人,2008,30(4):359-363.
[6]Burrows M,Morris G.The Kinematics and Neural Control of High-speed Kicking Movements in the Locust[J].The Journal of Experimental Biology,2001,204:3471-3481.
[7]陳勇,陳東輝,佟金,等.生物的跳躍形態(tài)與仿生跳躍機(jī)器人[J].2006.
[8]陳東良,吳磊,王康,等.仿蝗蟲彈跳腿機(jī)構(gòu)研究[J].中國機(jī)械工程,2011,22(2):166-169.
[9]陳勇,陳東輝,佟金,等.仿蝗蟲機(jī)器人跳躍機(jī)理的實(shí)驗(yàn)研究及運(yùn)動形態(tài)的三維動態(tài)仿真[J].2006.
[10]王忠,朱洪俊.Tchebycheff Lambada 近似直線導(dǎo)引機(jī)構(gòu)尺度探究[J].機(jī)械設(shè)計(jì),2007,24(12):27-29.
猜你喜歡
美與時代·美術(shù)學(xué)刊(2022年3期)2022-04-27 01:18:15
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
火花(2019年12期)2019-12-26 01:00:28
人大建設(shè)(2019年12期)2019-05-21 02:55:32
學(xué)苑創(chuàng)造·A版(2015年11期)2016-01-14 09:03:27
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
