螺旋輪式小型管道機(jī)器人及其驅(qū)動(dòng)控制系統(tǒng)研究
2014-12-19 01:46:12劉彩霞龔德利
制造業(yè)自動(dòng)化 2014年15期
劉彩霞,龔德利
LIU Cai-xia,GONG De-li
(上海應(yīng)用技術(shù)學(xué)院 機(jī)械工程學(xué)院,上海 201418)
0 引言
化工、制冷及核電站等相關(guān)領(lǐng)域,管道作為一種有效的物料輸送手段應(yīng)用極廣。為了提高管道的壽命,防止泄漏,保證安全,管道機(jī)器人作為滿足高效準(zhǔn)確的故障診斷及定期檢修的手段應(yīng)運(yùn)而生,其廣泛地應(yīng)用于管道的探傷、維修和焊接等諸多領(lǐng)域。
作業(yè)管徑小于80mm的機(jī)器人一般稱為小型管道機(jī)器人。在石油化工廠、熱力交換站及核電設(shè)備廠等企業(yè)存在著大量微細(xì)管道,這些管道長(zhǎng)期使用后可能存在腐蝕或機(jī)械損傷,會(huì)引起裂縫等,而裂縫對(duì)微細(xì)管道是致命的缺陷,可能造成嚴(yán)重事故。又微細(xì)管道所處的環(huán)境往往是人們不易直接到達(dá)或不允許人們直接進(jìn)入的,且存在中毒、輻射等危險(xiǎn),檢修難度大。因此,小型管道機(jī)器人在細(xì)小管道檢測(cè)方面具有良好的應(yīng)用前景[1],其能夠在不破壞管道的基礎(chǔ)上實(shí)現(xiàn)對(duì)管道的探測(cè),并通過有線或無線的方式將探測(cè)結(jié)果輸送出來。
近幾年,國(guó)內(nèi)外都對(duì)微小型管道機(jī)器人做了大量的研究工作,提出以仿生蠕動(dòng)、慣性沖擊、爬行、輪式驅(qū)動(dòng)及螺旋推進(jìn)等方式行動(dòng)的微機(jī)器人,并在樣機(jī)試制方面取得了重大突破。關(guān)于國(guó)內(nèi)外的微小型管道機(jī)器人的典型研究,日本DENSO公司、日本東京大學(xué)、日本東芝公司和上海大學(xué)做了大量工作。日本DENSO公司等研制了無線雙壓電晶片執(zhí)行器微機(jī)器人,上海大學(xué)開發(fā)研制了疊層壓電執(zhí)行器機(jī)器人、雙壓電晶片執(zhí)行器機(jī)器人,日本東京工業(yè)大學(xué)研制了電機(jī)螺旋式推進(jìn)機(jī)器人等[2~4]。
本文充分利用螺旋輪式驅(qū)動(dòng)機(jī)構(gòu)的優(yōu)點(diǎn),設(shè)計(jì)了Φ60mm螺旋輪式小型管道機(jī)器人。基于螺旋推進(jìn)的輪式管道小型機(jī)器人具有一些獨(dú)特的優(yōu)點(diǎn),如機(jī)器人本體結(jié)構(gòu)緊湊、行走效率高、牽引力大以及控制較簡(jiǎn)單等,能以一定的速度平穩(wěn)地運(yùn)動(dòng),輔之以適當(dāng)結(jié)構(gòu),可在彎管中行走。輪上的彈簧伸縮結(jié)構(gòu),使其能夠有效地適應(yīng)管道直徑的微小變化。因其具有一定的帶載能力,且易于與傳感器集成,故在機(jī)器人本體上搭載了智能傳感器檢測(cè)裝置。螺旋輪式小型管道機(jī)器人控制系統(tǒng),結(jié)合單片機(jī)技術(shù)和計(jì)算機(jī)技術(shù),實(shí)時(shí)監(jiān)測(cè)和控制管道機(jī)器人的動(dòng)作,可實(shí)現(xiàn)動(dòng)作狀態(tài)的存儲(chǔ)或打印[5]。
1 螺旋輪式管道機(jī)器人的運(yùn)動(dòng)結(jié)構(gòu)設(shè)計(jì)
管道機(jī)器人在能源供給設(shè)備的驅(qū)動(dòng)下,作為檢測(cè)裝置的載體,欲在微小管道內(nèi)平穩(wěn)、可靠地行走、啟停,必須滿足三個(gè)基本條件:形封閉和力封閉,行走機(jī)構(gòu)具有主動(dòng)驅(qū)使機(jī)構(gòu)。管道直徑為60mm的螺旋輪式小型管道機(jī)器人,其運(yùn)動(dòng)機(jī)構(gòu)由螺旋驅(qū)動(dòng)機(jī)構(gòu)、萬向節(jié)、直流電機(jī)和保持機(jī)構(gòu)組成,如圖1所示。機(jī)器人的螺旋驅(qū)動(dòng)機(jī)構(gòu)上3對(duì)驅(qū)動(dòng)輪對(duì)稱軸線分布,每組由前后兩個(gè)驅(qū)動(dòng)輪組成,并與管壁呈一定的螺旋升角β,即與軸線不垂直。當(dāng)直流電機(jī)通電時(shí),通過萬向節(jié)驅(qū)動(dòng)三對(duì)驅(qū)動(dòng)輪沿管壁做螺旋運(yùn)動(dòng)。驅(qū)動(dòng)結(jié)構(gòu)和保持機(jī)構(gòu)產(chǎn)生沿管道切線方向的摩擦力,通過彈簧壓緊管壁,防止保持機(jī)構(gòu)轉(zhuǎn)動(dòng),同時(shí)適應(yīng)一定管徑變化,通過萬向節(jié),將螺旋驅(qū)動(dòng)輪的螺旋運(yùn)動(dòng)轉(zhuǎn)化成保持機(jī)構(gòu)的直線運(yùn)動(dòng)。保持機(jī)構(gòu)不能轉(zhuǎn)動(dòng),只能沿著軸線方向運(yùn)動(dòng)。改變直流電機(jī)的轉(zhuǎn)動(dòng)方向可以實(shí)現(xiàn)機(jī)器人行進(jìn)方向改變[6]。
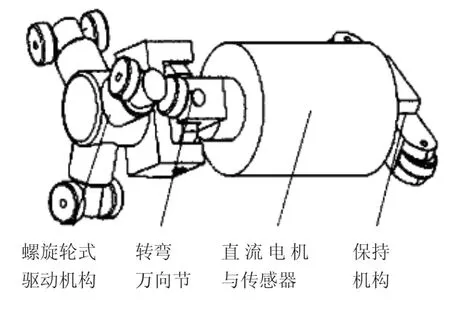
圖1 螺旋輪式小型管道機(jī)器人模型結(jié)構(gòu)圖
2 螺旋輪式管道機(jī)器人系統(tǒng)的硬件設(shè)計(jì)
2.1 螺旋輪式管道機(jī)器人系統(tǒng)的總體結(jié)構(gòu)
一個(gè)完整的管道機(jī)器人檢測(cè)系統(tǒng),可分為:移動(dòng)載體、管道內(nèi)部參數(shù)識(shí)別檢測(cè)系統(tǒng)、信號(hào)傳遞和動(dòng)力傳輸系統(tǒng)以及控制系統(tǒng)。控制系統(tǒng)又分為上位機(jī)控制系統(tǒng)和下位機(jī)(移動(dòng)載體)控制系統(tǒng)。運(yùn)算量主要集中在上位機(jī),故本控制系統(tǒng)采用PC-ARM的方式。上位機(jī)負(fù)責(zé)圖像處理和發(fā)送指令控制,下位機(jī)主要負(fù)責(zé)底層的控制和機(jī)器人行走速度信號(hào)的反饋,包括對(duì)行走電機(jī)的控制,反饋機(jī)器人的速度信息。
螺旋輪式小型管道機(jī)器人采用模塊化的體系結(jié)構(gòu),每個(gè)模塊獨(dú)立運(yùn)行,協(xié)調(diào)工作。系統(tǒng)總體結(jié)構(gòu)如圖2所示。
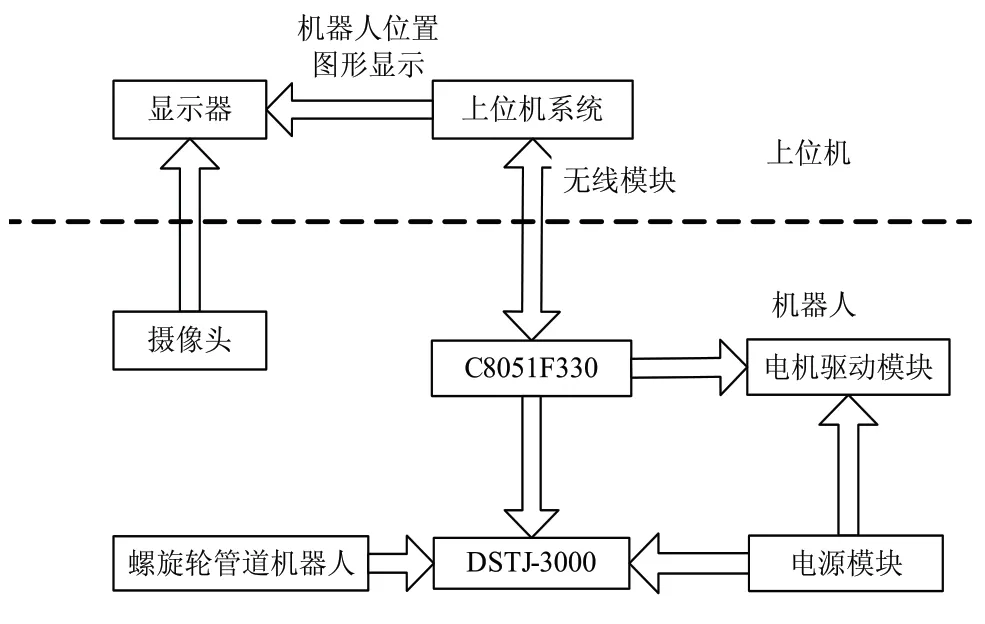
圖2 螺旋輪式小型管道機(jī)器人系統(tǒng)的總體結(jié)構(gòu)
螺旋輪式小型管道機(jī)器人系統(tǒng)由微型機(jī)器人、DSTJ-3000傳感器、基于C8051F330的數(shù)據(jù)采集系統(tǒng)、藍(lán)牙模塊以及PC上位機(jī)的數(shù)據(jù)處理系統(tǒng)組成。智能差壓壓力傳感器DSTJ-3000搭載在螺旋輪結(jié)構(gòu)上。C8051F330單片機(jī)為系統(tǒng)的設(shè)計(jì)核心,負(fù)責(zé)完成傳感器的數(shù)據(jù)采集、自動(dòng)控制,以及與上位機(jī)的通訊,無線藍(lán)牙模塊實(shí)現(xiàn)數(shù)據(jù)的采集與無線傳輸。運(yùn)算放大器將來自DSTJ-3000的微壓力小信號(hào)放大,放大之后的大信號(hào)再進(jìn)行濾波。單片機(jī)C8051F330直接接收該電壓信號(hào),經(jīng)內(nèi)部的ADC0模塊放大濾波和A/D轉(zhuǎn)變?yōu)閿?shù)字量,經(jīng)RS232串行口與藍(lán)牙模塊連接,完成管道內(nèi)信號(hào)的檢測(cè),再通過藍(lán)牙模塊將信號(hào)作FSK(頻移鍵控)調(diào)制后發(fā)送出去。電源模塊為電機(jī)和傳感器提供能源,單片機(jī)作為下位機(jī)組成前端測(cè)量單元,負(fù)責(zé)微型管道機(jī)器人對(duì)象參數(shù)的檢測(cè)、融合等。PC機(jī)作為上位機(jī),負(fù)責(zé)數(shù)據(jù)集中處理、控制等。藍(lán)牙模塊通過與上位PC的COM口相連來完成數(shù)據(jù)的無線接收。當(dāng)接收到來自發(fā)送方的數(shù)據(jù)信號(hào)后,在單片機(jī)的控制下,把接收到的數(shù)字信號(hào)經(jīng)內(nèi)置的RS-232電平轉(zhuǎn)換電路轉(zhuǎn)換為計(jì)算機(jī)串口所需電平,再通過計(jì)算機(jī)對(duì)接收到的信號(hào)做進(jìn)一步處理,實(shí)現(xiàn)對(duì)微型管道機(jī)器人的控制。
2.2 螺旋輪式管道機(jī)器人系統(tǒng)的硬件設(shè)計(jì)
小型機(jī)器人控制系統(tǒng)數(shù)據(jù)的采集和傳輸是關(guān)鍵,要求精度足夠,數(shù)據(jù)處理量大,合適的單片機(jī)和傳感器的選擇尤為重要。單片機(jī)在后臺(tái)工作,一方面考慮滿足工作要求,另外考慮功能擴(kuò)展,選擇C8051F330作為控制芯片接收數(shù)據(jù)。智能傳感器DSTJ-3000差壓壓力變送器,進(jìn)行數(shù)據(jù)的測(cè)量和傳輸,其收發(fā)數(shù)據(jù)電路如圖3所示,通過對(duì)控制芯片編寫程序,實(shí)現(xiàn)各參數(shù)的控制。

圖3 DSTJ-3000智能傳感器收發(fā)電路圖
C8051F330使用Silicon Labs的專利CIP-51微控制器內(nèi)核。CIP-51與MCS-51指令集完全兼容,可以使用標(biāo)準(zhǔn)803x/805x的匯編器和編譯器進(jìn)行軟件開發(fā)。CIP-51內(nèi)核具有標(biāo)準(zhǔn)8052的所有外設(shè)部件,包括4個(gè)16位計(jì)數(shù)器/定時(shí)器、一個(gè)具有增強(qiáng)波特率配置的全雙工UART、一個(gè)增強(qiáng)型SPI端口、768字節(jié)內(nèi)部RAM、128字節(jié)特殊功能寄存器(SFR)地址空間及17個(gè)I/O端口。C8051F330的硬件接口電路包括輸入/輸出模塊、D/A轉(zhuǎn)換模塊、信號(hào)讀取模塊等。通過硬件接口電路,初始化串口、產(chǎn)生定時(shí)中斷、讀取機(jī)器人動(dòng)作信號(hào)、急停信號(hào),接收上位機(jī)指令并通過D/A轉(zhuǎn)換信號(hào)實(shí)現(xiàn)對(duì)機(jī)器人的控制。
選擇合適的敏感元件,從數(shù)據(jù)的采集速度和控制精度來考慮。智能傳感器利用微處理機(jī)技術(shù)使傳感器智能化,傳感器不僅具有了視、嗅、味和聽覺的功能,還具有存儲(chǔ)、思維和邏輯判斷、數(shù)據(jù)處理、自適應(yīng)能力等功能,從而使傳感器技術(shù)提高到一個(gè)新水平。美國(guó)Honeywell公司研制的DSTJ-3000型號(hào)的差壓壓力變送器,是最為成功的智能傳感器。選擇DSTJ-3000變送器,它在同一塊半導(dǎo)體基片上用離子注射法擴(kuò)散配置了差壓、靜壓和溫度三種傳感元件,實(shí)現(xiàn)了功能的多選。其結(jié)構(gòu)主要由變送器、現(xiàn)場(chǎng)通信器和傳感器脈沖調(diào)制器組成。
無線網(wǎng)通信模塊實(shí)現(xiàn)機(jī)器人與PC機(jī)的遠(yuǎn)程通訊。用戶可以在遠(yuǎn)程PC上查看機(jī)器人的當(dāng)前運(yùn)動(dòng)信息,對(duì)機(jī)器人的運(yùn)行狀況進(jìn)行監(jiān)控。為了降低成本,采用串行方式實(shí)現(xiàn)PC機(jī)與移動(dòng)機(jī)器人的遠(yuǎn)程通信。原有Windows應(yīng)用軟件無需做任何修改,與使用本地串口一樣,但又具有網(wǎng)絡(luò)遠(yuǎn)程監(jiān)控的功能。內(nèi)建Web服務(wù)器,用于配置、診斷和監(jiān)控串口設(shè)備。藍(lán)牙技術(shù)是一種新型的短距離無線擴(kuò)頻通信技術(shù),具有體積小、功耗低、全球開放性和良好的互操作性等特點(diǎn)。與傳統(tǒng)的以電纜方式傳輸信息相比,應(yīng)用在信號(hào)監(jiān)測(cè)上,藍(lán)牙技術(shù)的優(yōu)點(diǎn)主要有:抗干擾能力強(qiáng);現(xiàn)場(chǎng)連線少,信號(hào)檢測(cè)方便等。藍(lán)牙技術(shù)在檢測(cè)系統(tǒng)的無線信號(hào)測(cè)量和自動(dòng)化控制系統(tǒng)等方面有著很強(qiáng)的應(yīng)用能力[7~10]。
3 螺旋輪式小型管道機(jī)器人軟件設(shè)計(jì)
系統(tǒng)軟件在單片機(jī)C8051F330的控制下完成來自智能傳感器DSTJ-3000的微動(dòng)作信號(hào)的采集、轉(zhuǎn)換和傳輸以及與上位機(jī)的通訊功能。包括A/D采樣、進(jìn)制轉(zhuǎn)換、單片機(jī)與藍(lán)牙無線數(shù)傳模塊之間的數(shù)據(jù)交換,以及經(jīng)藍(lán)牙無線數(shù)傳模塊與PC機(jī)之間的數(shù)據(jù)互傳。利用上位機(jī)軟件系統(tǒng),實(shí)時(shí)監(jiān)測(cè)和控制管道機(jī)器人的動(dòng)作,實(shí)現(xiàn)動(dòng)作狀態(tài)的存儲(chǔ)或打印。
螺旋輪式微型管道機(jī)器人控制系統(tǒng)的軟件采用C語言與Visual Basic混合編程技術(shù),下層控制程序用C語言編制,上層界面用Visual Basic編制。整個(gè)軟件主要包括:初始化模塊、動(dòng)作掃描模塊和定時(shí)中斷模塊。初始化模塊完成輸出端口、D/A轉(zhuǎn)換器等的初始化;動(dòng)作掃描模塊掃描上位機(jī)指令,并執(zhí)行相應(yīng)操作;定時(shí)中斷模塊接收?qǐng)?bào)警和急停等信息。其程序框圖如圖4所示。
螺旋輪式管道機(jī)器人管內(nèi)檢測(cè)水平的高低是管道作業(yè)的關(guān)鍵。螺旋輪式管道機(jī)器人控制系統(tǒng),是上位機(jī)和下位機(jī)及管道機(jī)器人交互的關(guān)鍵。控制系統(tǒng)開發(fā)過程中,注重從可靠性、工程性以及推廣應(yīng)用性的角度出發(fā),具有較高的可靠性和較大的推廣應(yīng)用價(jià)值。
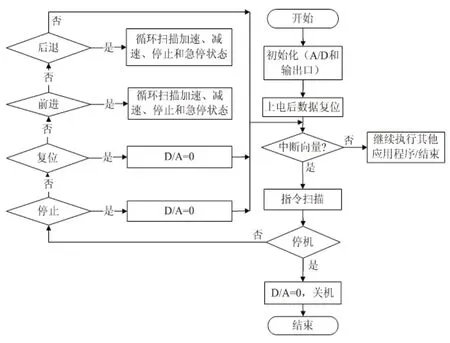
圖4 螺旋輪式小型管道機(jī)器人驅(qū)動(dòng)控制系統(tǒng)流程圖
4 結(jié)論
螺旋輪式管道機(jī)器人控制系統(tǒng)實(shí)現(xiàn)了機(jī)器人和上位計(jì)算機(jī)之間的數(shù)據(jù)采集和無線傳輸。螺旋輪式微型管道機(jī)器人可以自如地實(shí)現(xiàn)前進(jìn)、后退、調(diào)速等功能。并可以自動(dòng)適應(yīng)管徑的微小變化,速度快、穩(wěn)定性高。其位移信號(hào),通過搭載在機(jī)器人本體上的智能傳感器DSTJ-3000,經(jīng)信號(hào)處理模塊,傳輸?shù)絾纹瑱C(jī),單片機(jī)C8051F330分析并處理接收到的信號(hào),通過藍(lán)牙模塊與上位計(jì)算機(jī)進(jìn)行通訊。上位機(jī)可以檢測(cè)、控制、打印、顯示動(dòng)作信號(hào)。主界面上的控制信號(hào),再通過藍(lán)牙模塊寫入C8051F330,簡(jiǎn)單控制管道機(jī)器人的動(dòng)作。在實(shí)驗(yàn)室進(jìn)行了一次螺旋輪式管道機(jī)器人的爬行實(shí)驗(yàn),管徑范圍為58mm~62mm。實(shí)驗(yàn)結(jié)果均達(dá)到且部分超過了所要求的技術(shù)指標(biāo),系統(tǒng)運(yùn)行穩(wěn)定。
[1]孫立寧,劉品寬,吳善強(qiáng),等.管內(nèi)移動(dòng)微型機(jī)器人研究與發(fā)展現(xiàn)狀[J].光學(xué)精密工程,2003,11(4):326-332.
[2]徐從啟,解旭輝,戴一帆.新型微小管道機(jī)器人驅(qū)動(dòng)特性分析[J].國(guó)防科技大學(xué)學(xué)報(bào),2010,32(1),152-158.
[3]李鵬,馬書根,李斌,等.具有自適應(yīng)能力管道機(jī)器人的設(shè)計(jì)與運(yùn)動(dòng)分析[J].機(jī)械工程學(xué)報(bào),2009,45(1):154-161.
[4]羅自榮,尚建忠,郭瑜,等.螺旋推進(jìn)管道機(jī)器人的驅(qū)動(dòng)頭與保持架調(diào)節(jié)機(jī)構(gòu)設(shè)計(jì)[J].機(jī)械設(shè)計(jì),2009,26(8):41-43.
[5]何孟珂,周浩敏,郝欣.基于FPGA的硅諧振壓力微傳感器數(shù)字閉環(huán)系統(tǒng)設(shè)計(jì)[J].現(xiàn)代電子技術(shù),2008,31(13):150-153.
[6]余德忠.微細(xì)管道機(jī)器人工作原理分析及參數(shù)優(yōu)化[J].機(jī)床與液壓,2011,39(7):77-81.
[7]Wang Y.X.,Su J.B.Movability of the tracked pipelinerobot based on hierarchical fuzzy control.High Technology Letters.2001,17(2):166-172
[8]Li Y.,Yang X.D.,Chen H.Dynamics model and feedback control of tracked robots[J].Journal of Tsinghua University(Science and Technology),2006,46(8):1377-1380.
[9]Zhang Y.S.,Ning L.W.New kind of wireless micro robot actuated and controlled through outside magnetic field[J].Chinese Journal of Mechanical Engineering,,2004,17(2):215-218.
[10]Yang Z.X.,Sun B.Y..Research on an inertial piezoelectric actuator for a micro in-pipe robot[J].Journal of Harbin Institute of Technology(New Series),2006,13(4):473-476.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
