VT2100視頻檢測設備在交通調查中的精度分析
2014-12-22 08:17:22吳群慧
華東交通大學學報 2014年5期
吳群慧,吳 中
(河海大學土木與交通學院,江蘇 南京210098)
我國的公路交通量調查,起步于20世紀70年代末,調查方式經歷了早期純手工記錄觀測,到人工使用機械觀測方式,90年代開始使用地埋線圈檢測車流量輔以人工抽樣獲取車型系數的半自動化觀測發方式,2000年后相繼從國外引入了視頻、超聲波、微波等非接觸式的全自動車輛檢測技術。近年來隨著各類車輛檢測技術的逐步推廣應用,交調工作的科技含量得到了大幅提升,加快推動了交通智能化和信息化的發展進程。
目前被國家交通運輸部推薦使用的交調檢測設備約有線圈、壓電、微波、視頻、激光、地磁等6大類,組合型有線圈壓電激光、線圈壓電、超聲波微波、雙地感線圈、微波雷達、視頻微波、超聲波微波、地感線圈、視頻雷達及壓電磁阻等10余種。各地普遍采用的主要有線圈、壓電、微波、視頻、超聲波5大類型。因受到道路和環境的影響,江蘇省公路部門最初選擇了視頻設備作為試點,本文將通過對首個安裝于寧馬高速公路上的視頻交調檢測設備,通過連續多年的全天候道路交通流量數據檢測情況,分析其實際使用過程中所能達到的車流量精度、分車型精度以及設備穩定性,并嘗試探討影響視頻設備性能發揮和穩定性的因素。
1 視頻檢測原理及技術性能
1.1 檢測原理
視頻車輛檢測技術近年來發展迅速,是一種將視頻圖像處理和計算機圖形識別技術結合起來的數據采集技術,代表了未來交通流信息自動化智能化的發展方向。它以高性能的攝像機作為傳感器,在視頻范圍內設置虛擬線圈(檢測區),車輛進入檢測區時使背景灰度值發生變化,產生檢測信號,通過圖像識別軟件的分析和處理,得到交通量、平均車速、占有率、排隊長度等交通信息參數[1-5]。
視頻設備的工作原理是在需要檢測的路段車道上方架設攝像機,由CCD(chargecoupleddevice,電荷耦合器件)攝像機連續攝得2幀圖像(數字圖像),對其全部或部分區域進行比較,如有差異則說明檢測區有運動物體,從而檢測出通過的車輛。通過模式識別和人工智能算法,動態分析輸出的視頻(圖像)信號,獲得各種交通數據以及分車型數據。車型模型數據可根據各地實際情況動態實測創建。視頻檢測器的關鍵是快速的圖像識別算法。
1.2 技術性能
視頻檢測具有如下優點:①安裝簡便,無須封閉道路,不破壞路面,檢測地點可以移動,可一次檢測較大區域。②視頻檢測系統適應性強,檢測區域可以靈活定位,滿足不斷變化的數據采集要求,具備圖像監視和交通數據采集雙重功能,檢測數據種類多,具備處理突發事件的性能優勢。此外,視頻設備還可以移到新的地方使用。③軟件使用操作簡單,價格適中,維護費用低,前期國內用戶較多選擇使用。缺點是夜晚和天氣變化對檢測精度有影響[6]。
2 數據比較及其分析
選取寧馬高速公路南京段收費站所在的交調站點作為研究對象,對安裝于收費站區的視頻檢測設備的檢測數據進行比較分析。研究的基本思路是利用人工24小時觀測數據和收費站收費額數據作為比對基礎,計算視頻設備檢測數據相對誤差,收費額數據用于進行車流量精度(波動)的比較。具體方法是:第1,選取2008—2009年收費額報表,與同期設備檢測數據輸出文件對比,通過月變曲線圖得到運行期間總體精度情況,用P(precision)表示,計算式為(趨勢相同月份數/運行期總月份數)×100%。第2,選取2009、2010年人工比重調查小時交通量(分車型)數據,與同期視頻檢測數據文件對比,得到流量精度和分車型精度[7],計算公式為(1-)×100%。第3,選取2006—2011年設備檢測數據輸出文件,通過各年份的數據正常檢測天數,分析設備運行期間的穩定性和可靠性,用可靠度R(reliability)表示,計算式為(數據正常天數/運行期天數)×100%。
檢測點所在斷面為全封閉雙向4車道,距離收費道口約70 m。收費區寬約32 m,安裝有2個高桿燈,其上各有10盞燈,夜間照明情況較好。設備架設于道路中央分隔帶立柱上方,距離地面10 m高處安裝有一臺攝像機,計算機主機及輔助設備置于路側站房內,采用光纖進行數據傳輸。
2.1 總體精度
以2008—2009年收費站的車輛通行費月收入與設備檢測的汽車月流量數據進行比較,由月度變化曲線圖如圖1、圖2所示,2008年除1月和4月,2009年除3月,5月和6月,其余月份走勢基本與通行費一致,根據公式計算得到總體精度P為79.2%。
巖漿活動過程中,與火山活動有關的中酸性淺成—超淺成巖漿——花崗閃長斑巖沿隆起與凹陷的過渡帶的薄弱地帶上侵。當巖漿快速到達地殼淺部,溫度和壓力迅速減低,大量水、揮發分和成礦元素析出,逐漸向巖漿頂部運移。由于灰巖地層的屏蔽作用,使氣液大量聚集,當壓力遠遠超過圍巖的承壓時[19],引發半塑性和已固結巖石發生破碎和震裂形成隱爆-震裂角礫巖,同時產生一系列的爆破的節理-裂隙系統,并沿著裂隙系統和層理等薄弱界面“灌入”。而后隨著溫度和壓力的驟降,熔漿發生冷凝、結晶并析出大量含礦熱液,進入爆破裂隙系統,形成蝕變和金屬硫化物礦化。
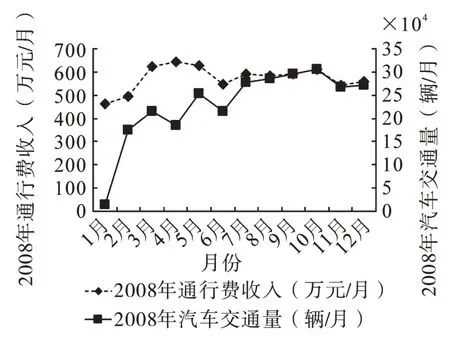
圖1 月度變化曲線圖(2008年)Fig.1 Graph of monthly changes
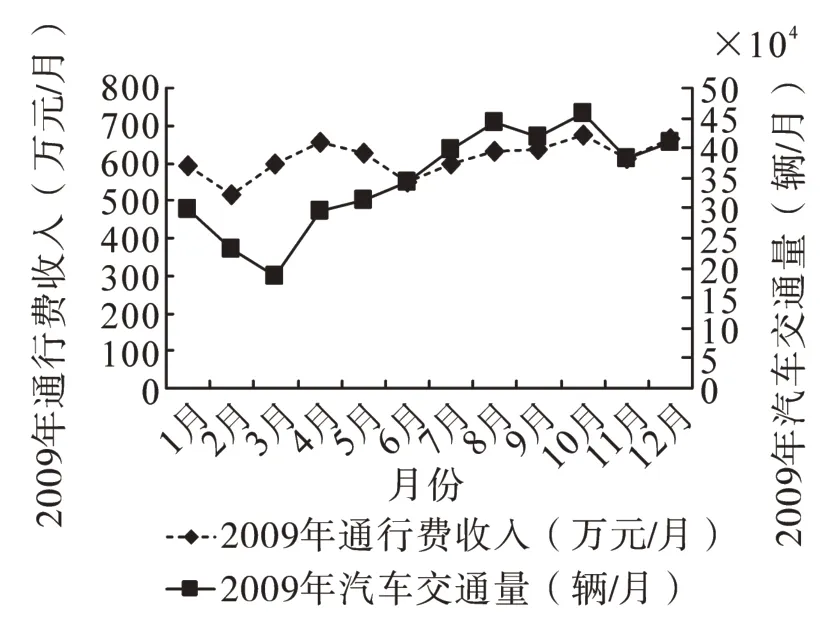
圖2 月度變化曲線圖(2009年)Fig.2 Graph of monthly changes
根據實際統計數據繪制得到曲線,月收入在400~700 萬元之間。根據設備實際檢測數據繪制得到曲線,月流量在100 000~500 000輛之間。
數據缺失是導致總體精度下降的原因,2008年1~4月份設備的月檢測天數分別為4天,26天,29天和25天,圖1顯示了該段時間內兩條曲線走勢差異較大。2009年3月份設備檢測天數亦是不齊全(23天),圖2中兩條曲線2~4月份間的走勢差異非常大。隨著運行時間的推移,設備的穩定性會發生改變,導致精度方面相比前一年度有所下降。
2.2 車流量數據精度
根據2009年10月15日上午9~11時、下午15~17時及晚間20~22時等3個高峰時間段共計6小時的人機數據比對結果(如表1所示),視頻設備的車流量精度計算值為88.5%。各時段的流量精度分別為早高峰81%,午高峰97.5%及晚高峰85.6%。
根據2010年10月20日6時~21日6時計24小時的人機數據比對結果(如表2所示),視頻設備的車流量精度為81.4%,白天12小時車流量精度為76.7%,夜間12小時車流量精度為98.1%。

表1 VT2100檢測精度分析數據表(2009年)Tab.1 The data table of detection accuracy
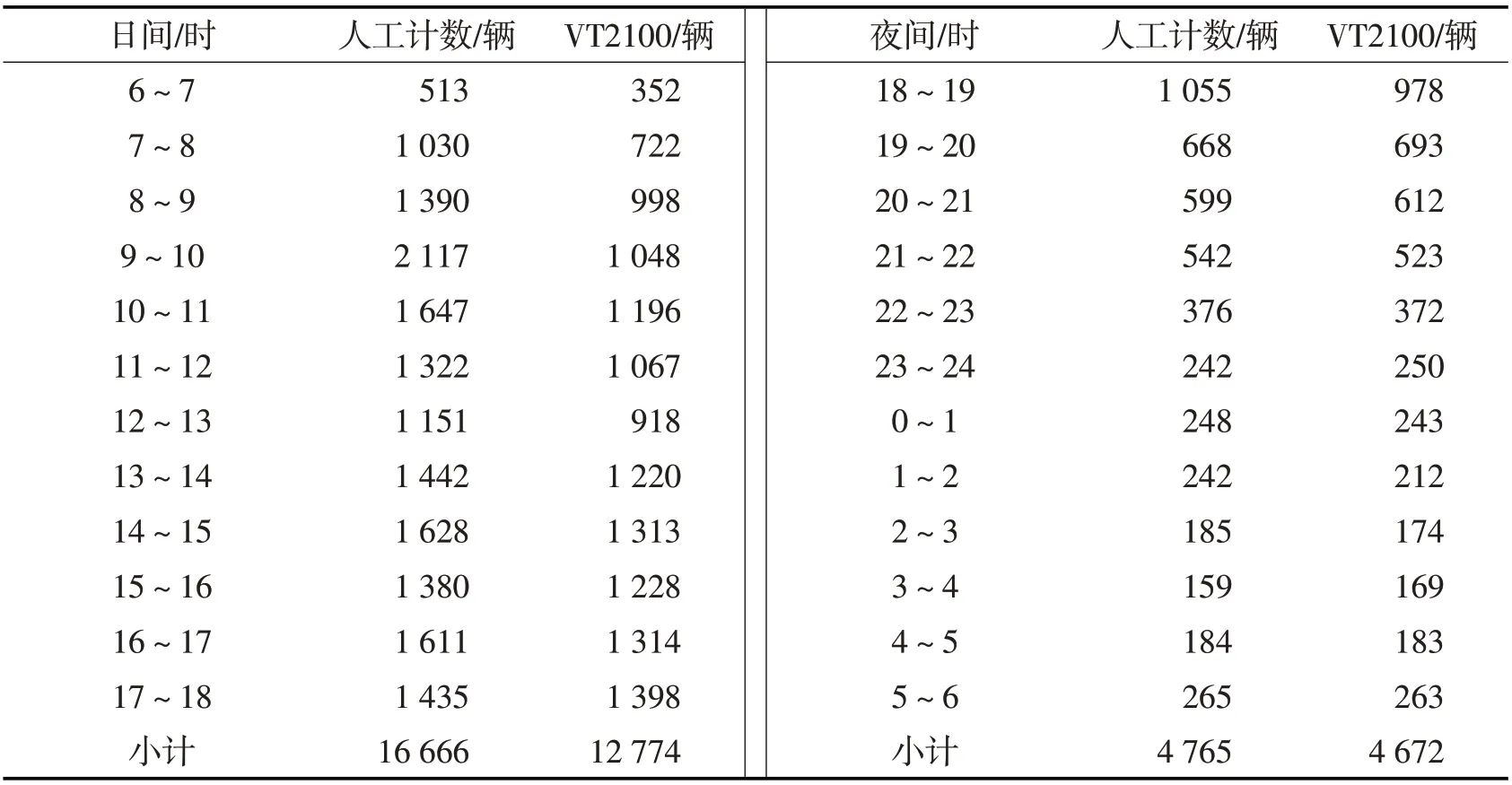
表2 VT2100檢測精度分析數據表(2010)Tab.2 The data table of detection accuracy
2.3 車型數據精度
2.3.1 高峰時段分車型精度
根據2009年10月15日上午9~11時、下午15~17時及晚間20~22時等3個高峰時間段共計6小時的觀測結果,人工對各類車型觀測值分別為:大貨383,中貨491,小貨189,大客325,小客3708,拖掛車453,單位均為輛;視頻設備對各類車型檢測值則分別為:大貨242,中貨196,小貨752,大客261,小客3271,拖掛車187,單位均為輛。視頻設備的分車型精度平均為62.6%。其中小客車的識別率較高,精度達到88.2%,其次為大客車,精度80.3%。設備對貨車的識別率差異很大,大型貨車識別率相對比較高,精度計算值為63.2%,其次為拖掛車,精度41.3%,中貨精度39.9%,車型識別率最低的為小型貨車,誤差達2.9倍。如圖3所示。
2.3.2 日夜分車型精度
根據2010年10月20日~21日連續24小時人工觀測結果,白天12小時人工對各類車型觀測值分別為:小貨914,中貨982,大貨985,特大貨565,拖掛車265,集裝箱車81,小客11 383,大客1 486,單位均為輛;視頻設備對各類車型觀測值則分別為:小貨2 677,中貨315,大貨845,特大貨217,1拖掛車203,集裝箱車49,小客7 688,大客780,單位均為輛。計算得到視頻設備的日間分車型精度平均59.1%(不含小貨)。其中大貨車的識別率最高,檢測精度85.8%,其次是拖掛,檢測精度為76.6%,小客車67.5%,名列第3。設備對貨車的識別率不及客車,各種貨車的識別率存在較大差異,大貨車的識別率相對比較高,其次為拖掛和集裝箱(精度為60.5%),車型識別率最低的為小型貨車,誤差達1.93倍,如圖4所示。
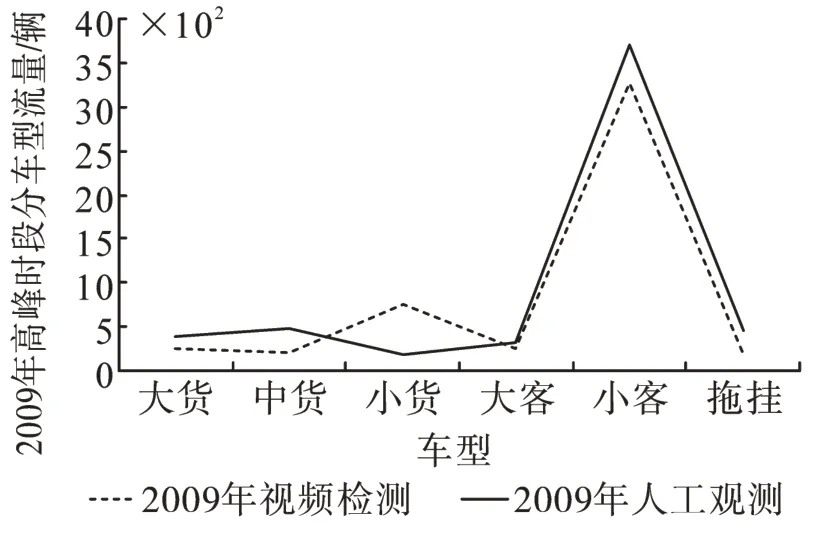
圖3 高峰時段分車型精度(2009年)Fig.3 Vehicle identification accuracy of peak hours
夜間12 小時(20 時~次日8 時)人工對各類車型觀測值分別為:小貨183,中貨412,大貨567,特大貨173,拖掛車581,集裝箱車57,小客2 569,大客131,單位均為輛;視頻設備對各類車型觀測值則分別為:小貨655,中貨113,大貨209,特大貨40,拖掛車87,集裝箱車14,小客3440,大客114,單位均為輛。根據夜間12個小時的人機數據比對結果,視頻設備的分車型精度平均值為40.7%(不含小貨),則低于日間精度。其中大客車的識別率最高,檢測精度87.0%,其次為小客,檢測精度為70.6%,大貨36.9%,名列第3。設備對貨車的識別率遠不及客車,各種貨車的識別率存在較大差異,大貨車的識別率相對比較高,其次為中貨和集裝箱,精度分別為27.4%和24.6%,車型識別率最低的為小型貨車,誤差達2.58倍,如圖5所示。
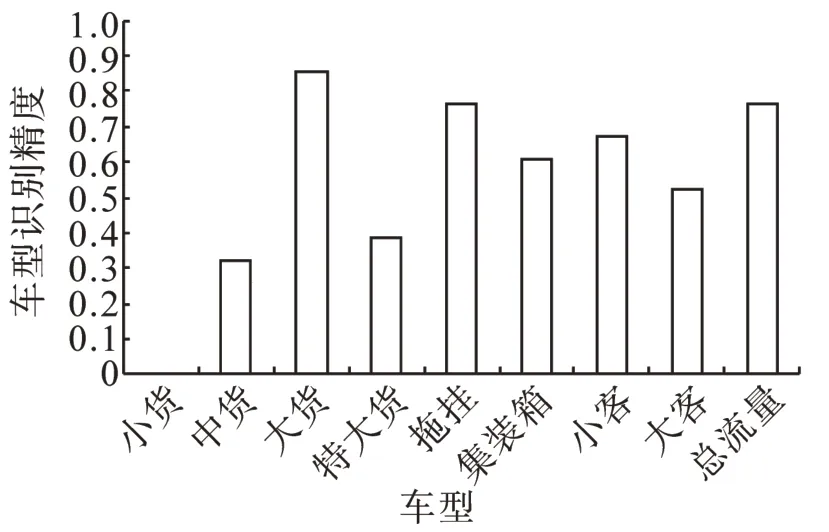
圖4 白天分車型精度(2010年)Fig.4 Vehicle identification accuracy of daytime
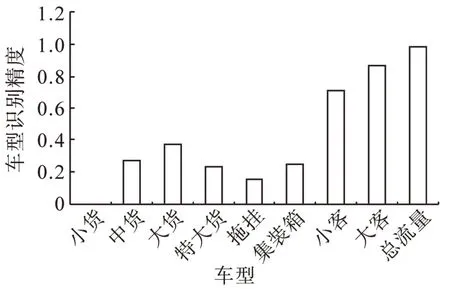
圖5 夜間分車型精度(2010年)Fig.5 Vehicle identification accuracy of nighttime
全天24 小時的人機數據比對結果,視頻設備的總流量檢測精度為81.4%,分車型檢測精度平均為49.7%(不含小貨)。其中,小客車的識別率最高,檢測精度79.2%,其次是大貨,檢測精度為67.9%,大客車55.3%,名列第3。設備對貨車的識別率明顯低于對客車的識別,各種貨車的識別率存在較大差異,大型貨車的識別率相對比較高,其次為集裝箱和特大貨,精度分別為45.7%和34.8%,車型識別率最低的為小型貨車,誤差達2.04倍,如圖6所示。
2.4 穩定性比較
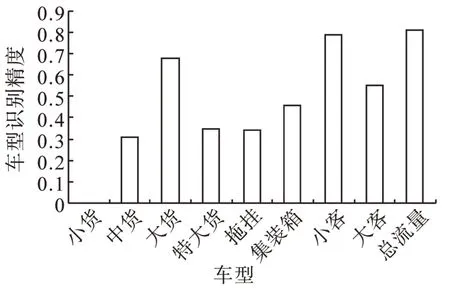
圖6 全天24小時分車型精度(2010年)Fig.6 Vehicle identification accuracy of 24 hours
2006—2011 年運行期間,根據監控記錄,設備因故障或受到相關因素的影響出現停測情況,使得檢測數據缺失。具體缺失天數為:2006年41天(5~12月運行天數275天),2007年41天(全年運行天數365天),2008年37天(全年運行天數366天),2009年8天(全年運行天數365天),2010年48天(全年運行天數365天),2011年0天(1~4月運行天數120天)。運行期間總時間1 856天,有數據(基本正常)天數1 681天,根據可靠度R計算值為90.6%。
2.5 精度分析
視頻檢測設備的車流量精度夜間高于白天,分車型平均精度則是白天高于夜間。分析原因可能是夜間通過道路斷面的車流量大為減少,使得車輛間保持一定的間距,對檢測探頭的干擾減少,有利于檢測精度的提高。另一方面,由于夜間光照度較白天下降,盡管路側設有高桿燈,但對于CCD攝像機來說,主要依靠視頻圖像清晰度來檢測識別車型,就如同夜間拍攝照片無法與白天相比,即使陰天拍出的照片也好過夜間的照片,故就車型識別而言,白天的精度高于夜間是可以理解的。小型貨車的識別率低,跟車型分類標準有關。根據《固定式交通量調查設備技術條件》[8]中的機動車分類與分型規則,小型汽車包含小客和小貨兩種類型,判定標準為車長<6 m的客車、貨車及專用汽車。人工容易識別貨車和客車,但判別中小貨車類型的方法,主要根據車軸數量和車牌照顏色,對車身長度的判別只能依靠個人經驗;而設備能夠根據通過檢測區的車輛圖像,由計算機根據圖像識別算法,做出車型長度判別。人機之間在標準掌握尺度上存在差異,不免會產生識別誤差。
根據設備檢測數據與人工觀測數據對比結果,24小時流量精度為81.4%,與理論上所能達到的95%以上的精度值相比,似乎應用效果并不理想,仍需在進一步提高精度方面做出努力。首先要從改善硬件性能和圖像識別軟件算法的設計上入手,提高系統整體性能,更好地適應道路檢測環境;其次需要加強設備的日常維護,使得設備能夠經常處于干燥、無塵的環境中安全有效地運行;第三,要確保供電和網絡通信的穩定與暢通,這是采集數據能夠被及時處理分析的重要基礎,要事先為交調檢測系統所處的工作環境做出合理選擇和配置。
3 設備運行狀況及故障分析
根據視頻檢測設備投入運行后連續24個月的交調監控與維護記錄,顯示基本正常運行月份在14個,占比58.3%,有效數據606天,占比82.9%。具體故障表現為以下幾個方面:①攝象機、主機等室外設備屢遭雷擊致故障。經排查主要原因在于防雷系統設計不夠完善,攝象機中缺少視頻防雷器、室內機柜無接地。②攝象機電源線路引起供電跳閘,由于攝像機及其防護罩暴露于大氣中,日曬雨淋后未及時清潔干燥,極有可能會引起連接線路的短路故障。③電源電壓不穩以及UPS出現故障。四是室內設備電線易遭鼠咬斷裂導致數據中斷。此外諸如通訊網線脫落,GPRS無線模塊卡欠費等方面的維護不及時均會導致一系列故障。
4 結語
VT2100視頻檢測設備的車流量精度較好,分車型精度不理想,設備的穩定性存在一定問題。影響設備性能發揮的主要因素大致有以下幾種:①網絡的穩定性;②市電電壓穩定性;③設備防雷設計與安裝施工存在不完善;④系統抗干擾設計尚待優化,以便更好地適應全天候的室外工作環境。
[1]高敬紅,楊宜民.道路交通車輛檢測技術及發展綜述[J].公路交通技術,2012(1):116-119.
[2]彭春華,劉建業.車輛檢測傳感器綜述[J].傳感器與微系統,2007(6):4-7.
[3]劉玉新.常用車輛檢測器性能比較與應用前景分析[J].公路交通科技:應用技術版,2007(10):26-27.
[4]李文舉.智能交通中圖像處理技術應用的研究[D].大連:海事大學,2005.
[5]張文溥.視頻車輛檢測技術及發展趨勢[J].中國人民公安大學學報:自然科學版,2010(1):91-94.
[6]劉文智.視頻車輛檢測器在高速公路上的應用[J].公路交通科技,2003(2):88-91.
[7]陳德望,高海軍.城市高速道路微波檢測器RTMS的檢測精度分析[J].公路交通科技,2002(5):122-124.
[8]池璐,馬永慶.固定式交通流量調查設備技術條件[R].北京:交通部規劃研究院,2007:8-58.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
工業設計(2016年12期)2016-04-16 02:52:00