模糊PID控制在船舶電站中的應用
2014-12-23 08:23:30陳瑜
科技視界 2014年31期
關鍵詞:船舶
陳 瑜
(上海船舶運輸科學研究所,中國 上海 200135)
0 引言
隨著技術進步和船舶電氣化程度的不斷提高,船舶電站容量日益增大,交流電制已在船舶上占有主導地位。現代船舶基本都使用交流電站,交流電站由多臺機組并聯運行供電。為了能夠不間斷的供電,需要進行并車、解列的負荷轉移和分配的操作。為了保證船舶電力系統電力質量,要提升功率自動分配的響應速度、提高機組間功率分配的精度。
本文采用模糊-PID 復合控制原理,在多機組并車初時采用模糊控制,加快負荷轉移速度;當多機組功率分配偏差較小時,采用PID 控制,通過模糊控制器整定PID 參數,提高多機組功率分配精度。
1 傳統船舶電站PID 控制器結構與原理
傳統PID 控制器具有算法簡單、穩定性好、可靠性高的特點,是自動化船舶電力系統中應用最廣泛的一類控制器。
傳統PID 控制器的輸出量為u(t),輸入量為e(t),它們之間的關系式為

式中u(t)為控制油門大小的模擬量脈沖信號,e(t)為本機功率與在網機組平均功率的功率差,Kp為比例增益,KI為積分增益,KD為微分增益。
傳統PID 控制器通過采集并處理發電機組頻率、電壓、電流、功率差信號,通過PID 計算后輸出合理的脈沖調整信號,以達到各臺機組間功率平衡的目的,保證電力質量。
2 模糊-PID 控制器的結構與原理
2.1 模糊控制理論簡述
模糊控制是以模糊集合論、模糊語言變量及模糊邏輯推理為基礎的一種計算機數字控制。模糊控制是基于豐富操作經驗總結出的、用自然語言表述控制策略,或通過大量實際操作數據歸納總結出的控制規則,用計算機予以實現的自動控制。它與傳統控制的最大不同,在于不需要知道控制對象的數學模型,而需要積累對設備進行控制的操作經驗或數據,它是一種非線性控制,屬于智能控制。
2.2 船舶電站模糊-PID 控制器原理
無論經典控制理論還是現代控制理論設計一個控制系統,都需要事先知道被控制對象精確的數學模型,然后根據數學模型以及給定的性能指標,選擇適當的控制規律,進行控制系統設計。然而,在許多情況下被控對象的精確數學模型很難建立。船舶電站多機組并車負荷轉移時,各類參數多變,要獲得滿意的控制效果,就需要對PID 的參數不斷的進行在線調整。由于電壓、電流、頻率、功率變化無常,往往沒有確定不變的數學模型和規律可循,利用模糊控制器調節成為一個可行的選擇。模糊控制器充分利用船舶電力系統操作人員的實踐操作經驗,充分發揮PID 控制器的優良控制作用,使船舶電力系統達到最佳的功率分配效果。
以船舶電力系統最常見的雙機并車,總功率100kW 為例。其單機功率與在網機組平均功率差論域X=[-50,50](kW),功率差變化率論域Y=[-5,5](kW/t)。使用模糊控制器對它進行調節,要求單機功率與在網機組平均功率差為0±50kW。采用7 個等分的三角形模糊子集涵蓋功率變化的范圍:NB(負大)、NM(負中)、NS(負小)、Z(零)、PS(正小)、PM(正中)、PB(正大);采用5 個等分的三角形模糊子集覆蓋功率變化率的范圍:NB(負大)、NS(負小)、Z(零)、PS(正小)、PB(正大)。通過模糊論域取值方法可以得出任意時刻的功率差及功率差變化率所對應的模糊論域及模糊子集。
2.3 調節傳統PID 控制器三個參數的模糊規則
通過多次操作的經驗總結或多次操作的數據處理,結合理論分析可以歸納出功率差e、功率差變化率ec 跟PID 調節器的三個參數KP、KI、KD間的關系
(2)當5%Pe≤≤20%Pe時,應取較小的KP,這樣可以使負荷轉移響應的超調略小一點;此時可以適當增加KI的取值。
2.4 模糊-PID 控制器結構
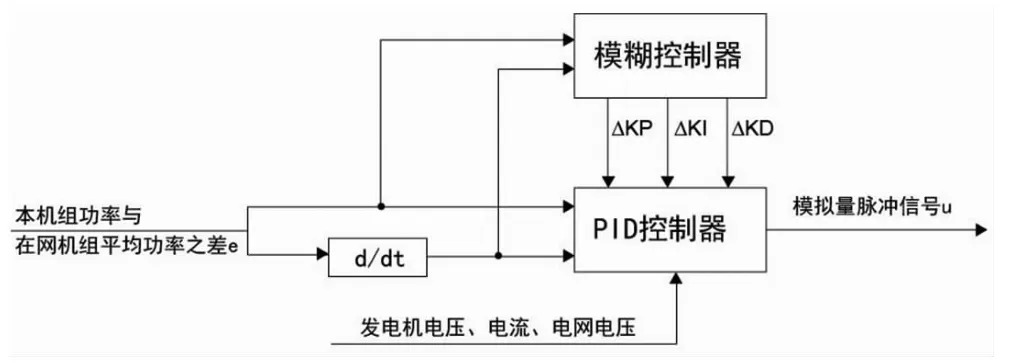
圖1 模糊PID 控制器結構圖
把輸入傳統PID 控制器的功率差e 和功率差變化率ec 同時輸入模糊控制器。分別對傳統PID 控制器三個參數KP、KI、KD進行調節,把得到的修正量ΔKP、ΔKI、ΔKD輸入到PID 控制器,對三個參數進行實時在線修正。
3 模糊-PID 控制器在調試生產中的作用
以船舶電力系統最常見的雙機并車,總功率100kW 為例。原在網機組功率由100kW 降至50kW,后并入機組功率升至50kW。
使用傳統PID 控制器調節負荷轉移,如圖2。
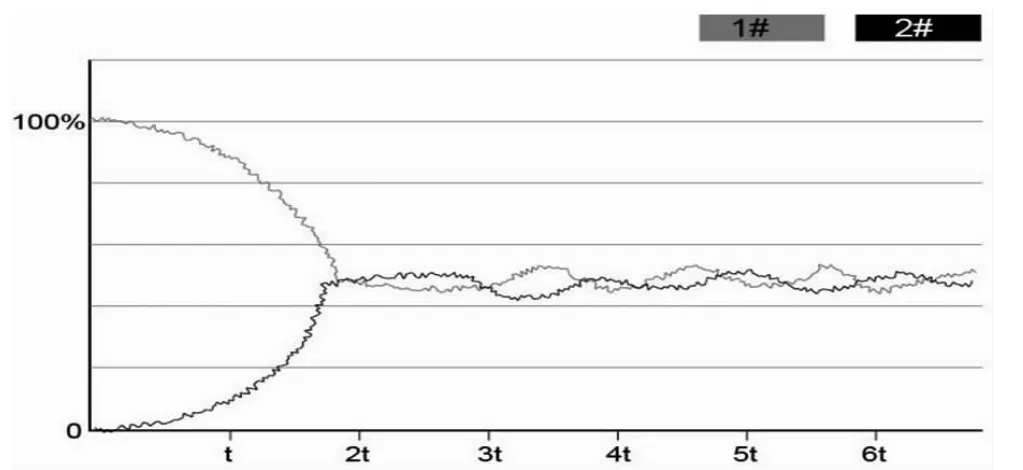
圖2 傳統PID 控制器負荷轉移調整過程
使用模糊-PID控制器調節負荷轉移,如圖3。

圖3 模糊PID 控制器負荷轉移調整過程
試驗數據表明:利用模糊-PID 控制器控制負荷轉移過程,當本機組與在網機組平均功率差較大時,有較快的負荷轉移響應速度;當功率差較小時,具有較小的超調量。
4 結論
本文針對船舶電站負荷轉移時傳統PID 控制器初期響應慢、后期超調量大的不足之處,利用模糊控制修正PID 控制器的三個參數,以得到較好的響應速度及較小的超調量。
[1]石辛民,郝整清.模糊控制及其MATLAB 仿真[M].清華大學出版社,2008.
[2]王文義,茅云生.船舶電站[M].哈爾濱工程大學出版社,2006.
[3]諸靜.模糊控制理論與應用[M].機械工業出版社,2006.
[4]林華峰.船舶電站與電力拖動[M].哈爾濱工程大學出版社,2006.
[5]Benjamin C.Kuo,Farid Golnaraghi,Automatic Control Systems[M].John Wiley&Sons,2003.
[6]Timothy J.Ross.Fuzzy Logic and Its Application[M].Beijing Electronic Industry Press,2001.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30