
旋挖鉆機控制器的軟件設計
2014-12-25 05:55:40王琳琳
科技視界 2014年23期
邱 雪 王琳琳
(1.貴州工業職業技術學院,貴州 貴陽 550003;2.貴陽鋁鎂設計研究院,貴州 貴陽 550023)
1 旋挖鉆機的發展狀態
旋挖鉆機是一種廣泛應用于建筑基礎工程中成孔作業的施工機械,適用于多種地基基礎施工。該類鉆機可更換多種鉆具,適用于多種場合施工,比如回轉斗適用于濕式鉆孔,短螺旋適用于干式鉆孔,巖心鉆適用于巖層鉆孔。從國內旋挖鉆機生產及銷售情況及國家的基礎工程建設情況來看,旋挖鉆機在國內今后幾年將有很大的市場。因此對旋挖鉆機控制技術與結構特點研究有著十分重要的意義。
由于國內外技術的差距,我國眾多旋挖鉆機生產廠商均采用國外專用控制器,如芬蘭的EPEC 控制器,德國力士樂的控制器,以上國外控制器均實現了對鉆孔深度、垂直度自動檢測及控制、鉆孔回轉自動定位、功率匹配等技術。而國內工程機械的配套廠家還未開發旋旋挖鉆機控制器,正是找準這一市場切入點,在對國內的中型旋挖鉆機控制系統進行了大量市場調研的基礎上,展開了旋挖鉆機控制器的國產化開發。
旋挖鉆機控制器開發主要研究動力頭的功能及控制。動力頭的功能及控制包括以下幾個主要方面:鉆桅垂直度自動控制、主副卷揚控制、變幅控制及變幅限位、鉆桿加壓、上車回轉動作、動力頭入巖模式、副卷揚自由落槌、深度清零、回轉角度清零。
旋挖鉆機控制器的硬件設計包括中央處理器、信號采集、輸出驅動、通信接口、電源設計、看門狗等幾個模塊,具備防靜電和浪涌設計,濾波保護,具備快速續流、過熱、短路保護功能。軟件設計要完成基本的控制功能,具備濾波保護功能。本文重點講述軟件設計部分。整個系統由液壓驅動部分及電控部分組成。液壓驅動部分由比例閥,油缸及鉆桅組成,電控部分由傳感器,控制器及相應的線束組成鉆桅控制系統由液壓系統和電氣控制系統組成。整個控制系統的原理圖如下所示:
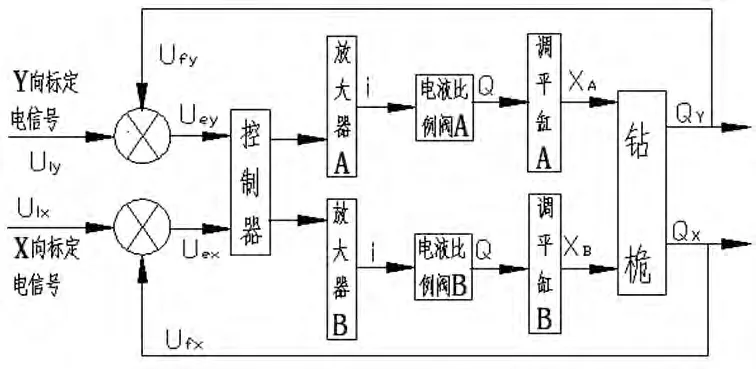
圖1 自動控制系統原理
2 控制系統軟件設計
2.1 主程序
在數據采集的程序中,開關量分為高電平有效及低電平有效兩種方式,開關量的處理也較為簡單,直接可判斷其輸出方式。而對于模擬量數據,采取多采集幾次數據求平均值的方式來對數據進行濾波。在模擬量數據處理的過程中,首先根據傳感器類型確定處理方式,傳感器分為電流型、電阻型、電壓型三種類型,其數據處理方式也有所不同。然后根據傳感器參數確定該參數是否報警或是其他輸出。
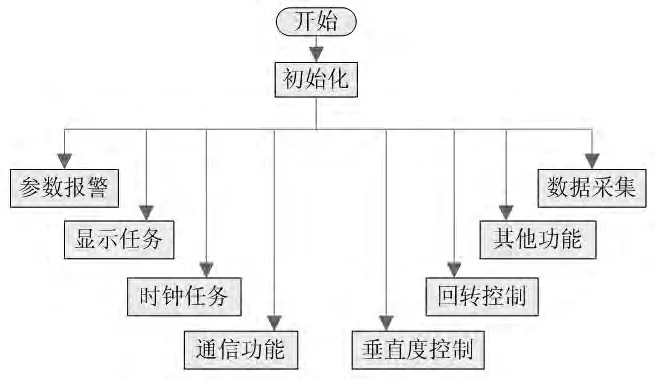
圖2 任務分配圖
2.2 算法程序
根據垂直度控制系統的控制原理,本文設計了運用自適應模糊控制算法的旋挖鉆機垂直度控制系統流程圖:
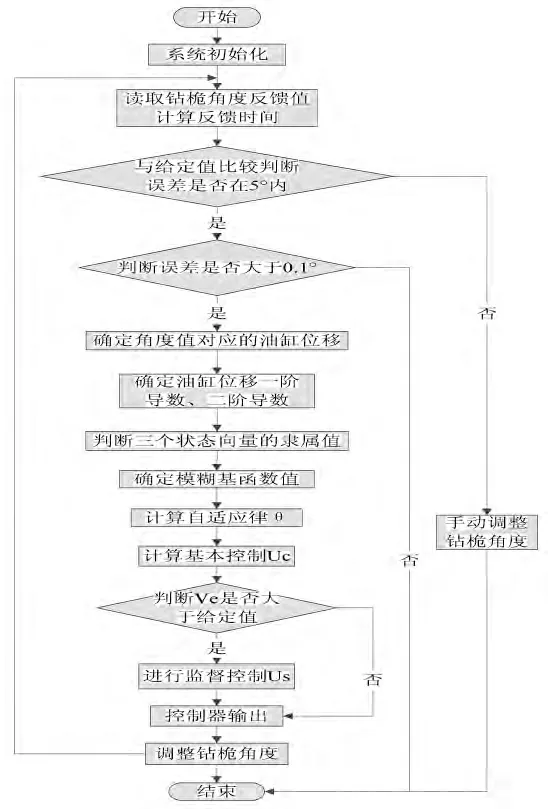
圖3
3 結論
本文初步分析了旋挖鉆機的應用特點以及其控制器硬件和軟件系統,并重點設計了控制器軟件系統的主程序和算法程序,通過該設計可以完成基本的控制功能,并具備濾波保護功能。
[1]郭勇,謝習華,何清華,劉均益.智能技術在旋挖鉆機中的應用[J].建筑機械技術與管理,2005,03.
[2]劉江麗.旋挖鉆機鉆桅垂直度控制系統的研究[D].長沙:中南大學機械電子工程學院,2007:40-42.
[3]沈建華,姜寧.STR71x 系列ARM 微控制器原理與實踐[M].北京:北京航空航天大學出版社,2006,9.
[4]盧立磊,劉春靜.現代控制理論的發展簡況[J].青島建筑工程學院學報,1999,20(4).
[5]劉正富,顧海榮.旋挖鉆機電子控制技術研究概況[J].筑路機械與施工機械化,2005(1).
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
建材發展導向(2021年9期)2021-07-16 07:11:36
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
西安建筑科技大學學報(自然科學版)(2014年2期)2014-11-12 13:04:54
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
