基于卡爾曼濾波的軸向加速度動態誤差補償方法
2014-12-26 06:33:46楊慧娟霍鵬飛
彈道學報 2014年1期
楊慧娟,黃 錚,霍鵬飛,王 超
(1.中北大學 儀器科學與動態測試重點實驗室,太原030051;2中北大學 信息與通信工程學院,太原030051;3.西安機電動態控制重點實驗室,西安710065)
彈丸軸向加速度的精確測量在旋轉穩定彈自主式射程修正引信研究中是一項關鍵技術,提高彈丸軸向加速度的測量精度對加速我國靈巧彈藥技術的發展具有非常重要的意義。1982年Merhav S J研究了借助于旋轉或振動加速度計三元組組成無陀螺的慣性測量組件,論述了從加速度計的輸出信號中分離線加速度和角速度的方法[1]。1994年Chen發表了一種使用6個加速度計進行測量的新穎設計[2]。國內最早的報道見于文獻[3]。
對于旋轉穩定彈軸向加速度測量,由于彈丸在高速旋轉時傳感器具有橫感特性,要求加速度傳感器安裝在彈丸對稱軸,但安裝誤差總是存在的,微小的安裝誤差與彈丸的高轉速環境相結合會導致很大的有害加速度輸出。為了減小該項有害加速度,美國陸軍研究實驗室基于高速轉臺(300r/s)對加速度傳感器進行標定,以得到轉速與有害加速度之間的曲線關系,作為誤差補償的依據[4-5]。目前,在我國加速度計測量組合被廣泛應用于常規火炮彈藥的測速中,但在現有的文獻中幾乎都是理想條件下的測試,或者是沒有考慮加速度傳感器的安裝誤差及橫感效應等對測試參數的影響,對加速度的動態補償更是很少。
作者已有的研究成果[6]從理論上分析了彈載加速度傳感器的輸出與其在彈上的安裝位置之間的關系,并在改進的質點彈道模型的基礎上建立了彈丸軸向加速度模型,通過仿真驗證了該模型的正確性。本文將在上述研究內容的基礎上,通過卡爾曼濾波對軸向加速度進行動態誤差補償,以此減小加速度傳感器在測量過程中輸出的有害加速度,從而提高測量精度,實現旋轉穩定彈軸向加速度的比較精確的測量。
1 動態補償的基本問題
對于某一發確定產品,當彈丸上的加速度傳感器安裝好后,其安裝位置引起的安裝誤差以及該加速度傳感器本身引起的橫軸靈敏度不再會發生變化。根據作者已有的研究成果[6],軸向加速度的測量誤差表達式為

從上述表達式可以看出,軸向加速度的測量誤差與彈丸轉速ω的平方成正比,且比例系數C是一個常數。當轉速的測量精度比較高時,動態補償就可以較好實現。
2 動態標定卡爾曼濾波算法
2.1 濾波狀態方程
由于彈上標定環境特殊復雜,且要求實時性強,因此選取改進的質點彈道方程作為標定算法的狀態方程[6-8]。
狀態方程為
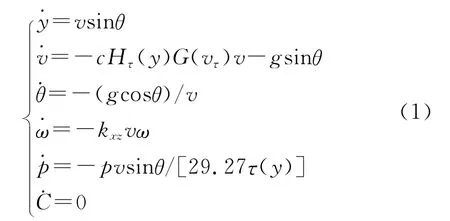
式中:v為速度,θ為彈道傾角,p為大氣壓強,ω為轉速,c為彈道系數,C為需要估計的常數,Hτ(y)為空氣密度函數,G(vτ)為阻力函數。
選取y,v,θ,ω,p,C為 狀態變量,即:x=(x1x2x3x4x5x6)T=(yvθωpC)T。
則方程(1)可以寫為

為了補償線性方程(2)對炮彈質心運動的近似描述造成的誤差,在此引入一個零均值高斯白噪聲V,且V~N(0,Q′)。
狀態變量的初值為

在具體仿真過程中某次狀態變量的初值選取與本次改進的質點外彈道方程解算的初值相同,其中常數C0為一個確定的初值。
2.2 濾波量測方程
基于旋轉穩定彈的改進的質點外彈道方程,結合軸向加速度的輸出模型,仿真得到的加速度傳感器輸出值作為濾波過稱中加速度傳感器的量測值aact,通過仿真得到的轉速作為濾波轉速的量測值。
量測方程為

式中:Bs為加速度傳感器的零點漂移。
在量測方程基礎上加入量測噪聲d,且d~N(0,R′)。
2.3 動態補償濾波算法
卡爾曼濾波只適用于線性系統,而式(1)、式(4)都是非線性的,因此需要對非線性狀態方程(1)、量測方程(4)進行線性化、離散化,由此得到卡爾曼濾波彈道方程[9]。
預測一步預測方程:

量測量的一步預測方程:

一步預測均方誤差方程:

最優濾波增益方程:

估計均方誤差方程:

式中:P,Q表示狀態方程的誤差;R表示量測方程的誤差,φ為一步轉移矩陣,H為量測矩陣。
狀態方程的誤差和量測方程的誤差在仿真過程中的初值是根據硬件組成及外場測量結果得到的,即將場外實測數據在實驗室的處理結果與雷達測量數據進行比較。
濾波初值:

3 仿真結果分析
在卡爾曼濾波動態補償的仿真過程中,結合旋轉穩定彈的改進的質點彈道方程,考慮傳感器的零位偏移、安裝誤差、橫軸靈敏度等,得到卡爾曼濾波的量測值,仿真量測量系統如圖1所示。

圖1 仿真量測量系統
在仿真過程中,彈道系數、射角、初速的初始條件為:c0~N(0.475 0,0.002 6),θ0~N(47,0.682 3)(°),v0~N(850,2.34)(m/s)。
在標準大氣模型下某次仿真結果如圖2~圖7所示。圖中,aa為軸向加速度誤差,ac為彈丸質心絕對加速度,abc為補償后軸向加速度,aa,bc為軸向加速度補償后誤差。

圖2 轉速隨時間變化曲線
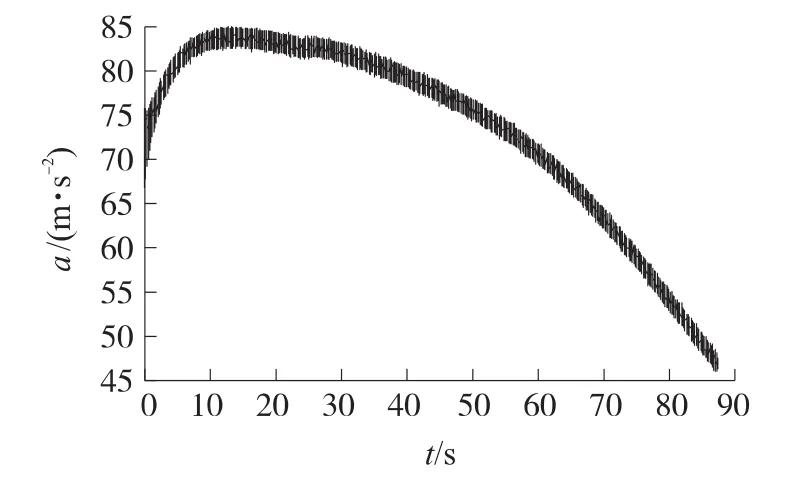
圖3 軸向加速度傳感器的實際輸出曲線

圖4 軸向加速度誤差曲線

圖5 補償后軸向加速度與彈丸質心絕對加速度曲線
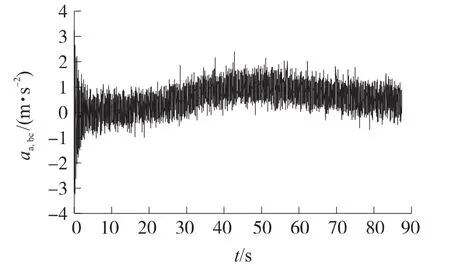
圖6 軸向加速度補償后誤差曲線
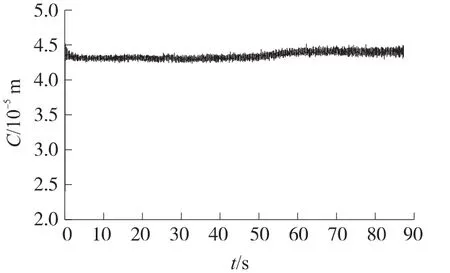
圖7 動態補償估計出的比例系數曲線
從仿真結果可以看出,補償后的加速度誤差非常小,且全彈道估計出的比例系數近似為一常數。
4 靶場試驗結果分析
針對某次靶場試驗的加速度傳感器測量的數據,用上述的動態補償算法對試驗數據進行補償。其中每一發產品一前一后安裝2個加速度傳感器,結合雷達外測數據,得到補償誤差的統計結果,見表1,表中,μa為均值,σa為均方差。其中某一次標定結果如圖8和圖9所示,圖中,a為軸向加速度。

表1 試驗數據標定結果統計

圖8 靶場試驗軸向加速度傳感器輸出曲線
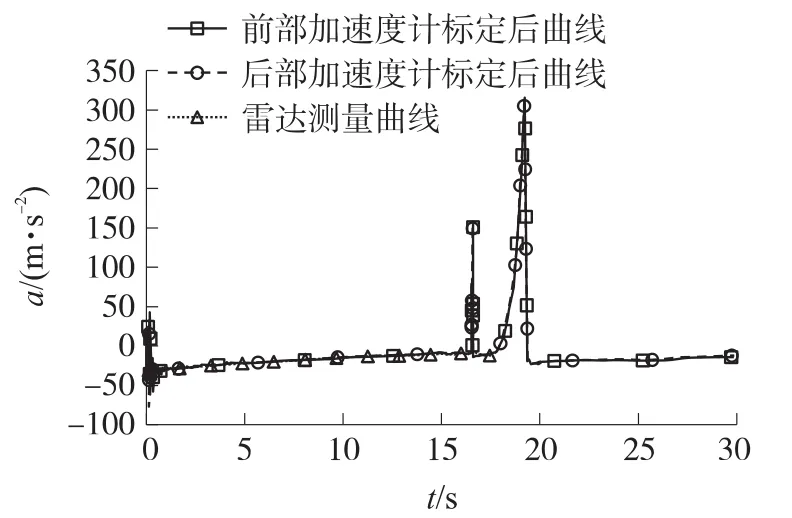
圖9 軸向加速度標定曲線與雷達測量曲線
對6個加速度傳感器的補償數據進行統計。
6次補償誤差均方差為0.197 0m/s2,均值為-0.032 9m/s2。6次補償后均方差為2.012 5m/s2,綜合概率誤差為2.022 1m/s2。
綜上所述,針對同一發產品,由于2個加速度傳感器的安裝位置不同(安裝在彈丸軸線上2個加速計),其測量結果差別非常大,但對傳感器的測量值進行補償后,與雷達測量值比較誤差非常小,而且2個傳感器補償后結果也很一致,補償后的加速度測量誤差均值小于0.05g,均方差小于0.32g。實際加速度傳感器測量值與雷達測量值的誤差補償前均值為5g左右,而補償后測量誤差均值小于0.05g,軸向加速度測量誤差的均值由0.1g降低到0.01g的量級,大幅度地提高了軸向加速度測量精度,在一定程度上說明了補償算法具有一定的的準確性和有效性。
5 結論
本文通過卡爾曼濾波對彈丸軸向加速度輸出誤差表達式當中的比例系數C進行估計,從而對加速度傳感器的輸出值進行補償,以此得到彈丸的實際軸向加速度。蒙特卡洛模擬仿真和外場試驗證實了文中理論分析的正確性和誤差減小方法的有效性。
[1]MERHAV S J.A no gyroscopic inertial measurement unit[J].Journal of Guidance,1982,5(3):227-235.
[2]殷栩.基于加速度計的炮彈慣性測量硬件系統設計[D].哈爾濱:哈爾濱工業大學,2006:3-4.YIN Xu.Hardware system design of shells inertial measurement based on accelerometer[D].Harbin:Harbin Institute of Technology,2006:3-4.(in Chinese)
[3]孫志明.硅加速度計在末制導炮彈測試中的應用[J].彈箭與制導學報,2003,23(1):91-93.SUN Zhi-ming.Applications of silicon accelerometer in guided projectile test[J].Journal of Projectiles,Rockets,Missiles and Guidance,2003,23(1):91-93.(in Chinese)
[4]FLECK V,SOMMER E.Study of real-time filtering for an inertial measurement unit with magnetometer in a 155mm projectile[C]//IEEE/ION Position,Location and Navigation Symposium.Coronado,USA:IEEE,2006:83-87.
[5]BROWN T G.Harsh military environments and microelectromechanical devices[C]//The Second IEEE International Conference on Sensors.Toronto:IEEE,2003:753-760.
[6]楊慧娟.旋轉穩定彈軸向加速度測量誤差模型分析[J].彈道學報,2013,25(4):48-52.YANG Hui-juan.Measnrement error model analysis of axial acceleration for rotational stability bomb[J].Journal of Ballistics,2013,25(4):48-52.(in Chinese)
[7]CRASSIDIS J L,MARKLEY F L.Unscented filtering for spacecraft attitude estimation[J].Journal of Guidance,Control,and Dynamics,2003,26(4):536-542.
[8]SIMON H.Kalman filtering and neural networks[M].New York:John Wiley & Sons,Inc,2001:215-218.
[9]LEONARD C.Modified projectile linear theory for rapid trajectory prediction[J].Journal of Guidance,Control,and Dynamics.2005,28(5):375-377.
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年12期)2018-11-25 09:37:34
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
