單兵自動武器簡易光電火控系統協同仿真
2014-12-26 07:02:24趙彥峻張萬青
彈道學報 2014年1期
關鍵詞:模型
趙彥峻,張萬青,王 欣,徐 誠
(1.山東理工大學 機械工程學院,山東 淄博255091;2.南京理工大學 機械工程學院,南京210094)
在單兵光電火控系統的研制過程中,瞄具成像、激光測距、光電火控彈道等各個單領域模型的分析是不可分割的。傳統的方法是設計人員在利用擅長處理此類模型的平臺之上,分別建立各自的模型并分別進行調試與仿真,按照單個單一模型的方式進行仿真,沒有考慮各個模型間的相互聯系、制約和反饋問題。某個模型仿真的結果經過數據格式或者調整之后,成為另外模型仿真的初始參數。如果后續模型仿真過程中不能滿足要求,則需要回到前者各個模型中進行修改,如此反復進行,直到滿意為止。如果能將單兵光電火控系統各模型集成為一個各個領域共享的仿真模型,利用協同仿真技術進行聯合性能分析,則會提高效率,縮短開發周期,降低開發成本。
協同仿真技術是應用于復雜系統協同工作的技術,它利用先進的建模、仿真和信息管理等綜合技術,將復雜系統的多領域模型實現聯合仿真。協同仿真建模方法有多種,基于接口的協同仿真技術應用較廣[1-3]。它是通過提供統一的接口標準,實現復雜系統中不同單領域模型之間的數據與信息交互。這種技術不需要改變單領域模型的仿真環境、算法,只需要對仿真軟件的數據與信息的接口實現對接。
本文采用基于接口的協同仿真方法,對單兵火力系統簡易光電火控系統實現協同仿真。對不同人員,利用不同軟件編制的仿真程序實現了協同仿真。
1 單領域仿真模型
建立瞄具成像、激光測距、火控彈道各單領域仿真模型。
1.1 瞄具成像模型
士兵通過瞄具觀察到目標,目標由三維圖像變換為望遠式瞄具中的平面圖像,為描述這些目標及圖像的關系,需要建立圖像、瞄具、世界坐標系[4]。世界坐標系、瞄具坐標系如下式所示:
式中:(Xj,Yj,Zj,1)和(XM,YM,ZM,1)分別為世界坐標系和瞄具坐標系下的齊次坐標,R≡(0 0 0)T,T為3×1平移矢量。
透視成像的數學方程用齊次坐標與矩陣[5]表示為
式中:f為瞄具焦距,(X,Y)為M′點在圖像坐標系下的坐標,(XM,YM,ZM)為空間點M在瞄具坐標系下的坐標。
空間內點M的坐標與它的投影M′點的坐標為

式中:αX=f/dX,αY=f/dY;dx,dY為單個像素在X軸和Y軸方向上的物理尺寸;M1,2為3×4的投影矩陣;參數αX,αY,u0,v0決定了M1,這些參數稱為瞄具內部參數,只與瞄具內部結構有關;M2由瞄具外部參數決定。瞄具標定及其它參數的含義可參閱文獻[6]。
瞄具分劃與目標成像關系模型如下:

式中:D為觀察者與目標之間的距離(m),H為目標的高度或寬度(m),a是用分劃板測得的用密位表示的目標高低角或目標方向角。
本模型利用MATLAB計算器求解仿真。
1.2 激光測距數學模型
激光測距儀按測定方法可分為脈沖激光測距儀和相位激光測距儀。軍事上多采用脈沖激光測距儀。待測目標的距離為

式中:L為待測目標的距離(m),光速c=3×108m/s,t為激光脈沖往返時間(s)。
激光往返時間的計算是用時標振蕩器來完成的。激光往返時間t的計算公式如下:

將式(6)代入式(1),得:

式中:fH為時標振蕩器的振蕩頻率,n為時標脈沖個數。
本模型利用MATLAB計算器求解仿真。
1.3 火控彈道數學模型
火控彈道數學模型[7-8]為
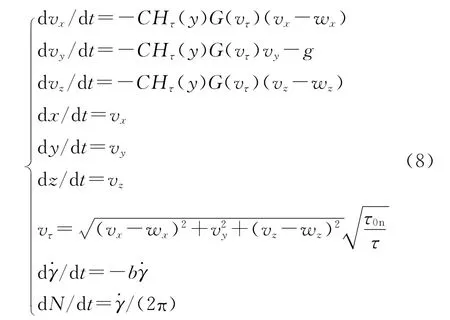
式中:C為彈道系數;Hτ(y)為氣重函數;G(vτ)為阻力函數;wx為縱風,wz為橫風;N為彈丸自轉轉數;為彈丸自轉角速度;虛溫τ如下式[9]所示:
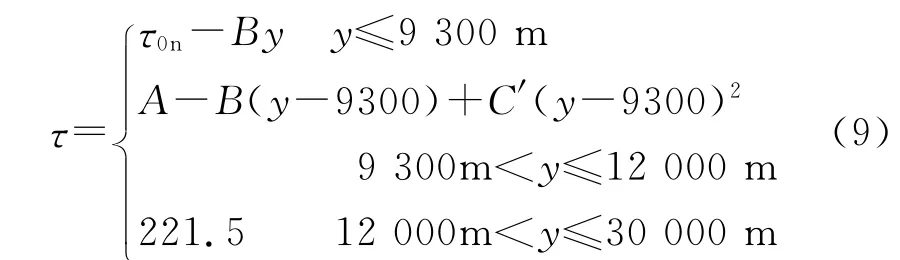
式中:τ0n=288.9K,A=230,B=6.328×10-3,C′=1.172×10-6。
火控系統彈道問題邊界條件中彈丸飛行軌跡的起點S:t=0,x=0,y=0,v=v0;彈丸飛行軌跡的落點E:x=d,y=0。在此,假定點S和點E在同一水平,兩者之間的距離為d。
本模型采用VB語言求解仿真。
2 協同仿真模型
2.1 簡易光電火控系統協同仿真模型
基于建立的瞄具成像、激光測距、火控彈道3個單領域的仿真模型,以Matlab為平臺,將這些單領域模型利用接口技術構造一個能協同工作的協同仿真模型——簡易光電火控系統協同仿真模型,其框架及數據間的傳遞關系如圖1所示,圖中箭頭描述數據間的傳遞與約束關系。白光瞄具尋找到目標,把目標參數傳給激光測距仿真模型;激光測距仿真模型經過計算得到目標距離,并把目標距離傳給白光瞄具仿真模型;白光瞄具出示目標離士兵的位置及目標圖像,同時將士兵與目標的距離值(形成數據文件)傳給火控彈道仿真模型;火控彈道模型通過計算得到射擊的射角、瞄準點、彈丸轉數及彈丸的飛行時間等參數,并輸出結果。射角和瞄準點值回傳給白光瞄具,以數值的形式出示在白光瞄具的屏幕上,射角傳給人-槍系統,調整槍射擊的位置,彈丸轉數與飛行時間傳給榴彈引信以控制榴彈爆炸時間。

圖1 簡易光電火控系統協同仿真模型數據間的傳遞關系
2.2 簡易光電火控系統協同仿真實現
以Matlab作為集成平臺,將由不同計算軟件編程的3個仿真模型(火控彈道模型、瞄具成像模型、激光測距模型)實現協同操作,形成一個協同仿真模型,程序界面如圖2所示。
圖2 簡易光電火控瞄具協同仿真計算程序界面
2.3 簡易光電火控系統協同仿真結果
為檢驗仿真結果的可靠性,采用多種數據進行了實驗,并與實際情況進行了對比。在此僅以榴彈對600m虛擬立靶目標進行射擊為例,運行簡易火控系統協同仿真模型計算程序,獲得了火控仿真的特性參數、瞄具成像仿真結果,如彈丸飛行時間為3.299s,初始射角為5.256°,彈丸轉數為1 014等射擊諸元值,這些結果以文件和數據庫的形式保存,方便了與外界數據的傳遞與應用。協同仿真的部分輸出結果界面如圖3~圖5所示。
圖3 600m處目標在瞄具中成像
圖4 彈丸轉數-時間曲線

圖5 射擊諸元部分結果輸出界面
3 結束語
本文建立了簡易光電火控系統的基于接口的協同仿真模型,將不同軟件環境下的3個模型實現了協同操作,解決了多種非線性模塊在不同軟件環境下實現聯合操作的問題。通過協同仿真實驗,全面模擬了該簡易火控系統工作過程,獲得了簡易火控系統仿真特性參數。通過對比簡易火控系統單領域仿真與協同仿真,結果表明:協同仿真提高了仿真的效率,縮短了開發周期,減少了人員的數量,降低了開發成本。該項研究為進一步實現單兵火力系統協同仿真提供了參考。
[1]張曉東,張培林,傅建平,等.基于CFD與協同仿真的火炮后坐分析計算[J].彈道學報,2010,22(3):30-34.ZHANG Xiao-dong,ZHANG Pei-lin,FU Jian-ping et al.Analysis and calculation of gun recoil based on CFD and collaborative simulation[J].Journal of Ballistics,2010,22(3):30-34.(in Chinese)
[2]王卓,馮曉寧,萬磊,等.智能水下機器人協同仿真框架研究[J].上海交通大學學報,2012,46(4):613-619.WANG Zhuo,FENG Xiao-ning,WAN Lei,et al.A framework of collaborative simulation for autonomous underwater vehicles[J].Journal of Shanghai Jiaotong University,2012,46(4):613-619.(in Chinese)
[3]LIANG Si-lu,ZHANG He-ming,WANG Hong-wei.Combinative algorithms for the multidiscriplinary collaborative simulation of complex mechatronic products based on major step and convergent integration step[J].Chinese Journal of Mechanical Engineering,2011,24(3):355-363.
[4]YUE Ying-chao,FAN Wen-hui,XIAO Tian-yuan,et al.Novel models and algorithms of load balancing for variable-structured collaborative simulation under HLA/RTI[J].Chinese Journal of Mechanical Engineering,2013,26(4):629-640..
[5]藍慕云,劉建瓴,吳庭萬,等.機器視覺中針孔模型攝像機的自標定方法[J].機電產品開發,2006,19(1):42-44.LAN Mu-yun,LIU Jian-ling,WU Ting-wan,et al.Recent progress in pinhole model camera self calibration for machine vision[J].Development &Innovation of Machinery & Electrical Products,2006,19(1):42-44.(in Chinese)
[6]趙彥峻,徐誠.基于徑向約束的單兵光電瞄具建模與仿真[J].彈道學報,2011,23(2):87-91.ZHAO Yan-jun,XU Cheng.Modeling and simulation of optical-electronic observation and sighting device based on radial restriction[J].Journal of Ballistics,2011,23(2):87-91.(in Chinese)
[7]黃吉傳,劉占辰,房振生.高速旋轉彈丸外彈道仿真研究[J].微計算機信息,2008,24(6):227-229.HUANG Ji-chuan,LIU Zhan-chen,FANG Zhen-sheng.Simulation on exterior trajectory of the spinning projectile[J].Microcomputer Information,2008,24(6):227-229.(in Chinese)
[8]周啟煌,單東升.坦克火力控制系統[M].北京:國防工業出版社,1997.ZHOU Qi-huang.Tank fire control system[M].Beijing:National Defense Industry Press,1997.(in Chinese)
[9]朱元昌.火控系統的數字仿真[M].北京:國防工業出版社,1997.ZHU Yuan-chang.Digital simulation of the fire system[M].Beijing:National Defense Industry Press,1997.(in Chinese)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
