基于自適應加權平均融合的路段行程時間估計
2014-12-26 02:16:22崔夢瑩候文宇衛小磊
交通運輸研究 2014年15期
關鍵詞:融合
崔夢瑩,劉 鍇,候文宇,衛小磊
(1.大連理工大學交通運輸學院,遼寧 大連116024;2.大連市交警支隊科技處,遼寧 大連116011;3.西安公路研究院,陜西 西安710065)
0 引言
近年來,隨著智能交通系統的不斷發展,先進的交通信息服務系統得到了廣泛的關注。為使得交通信息服務系統能夠為出行者提供高效的信息服務,提高交通信息的高精確度勢在必行。
路段行程時間作為評價路段交通運行狀況和擁擠水平的重要指標[1],是交通信息服務系統的重要基礎。目前應用最為廣泛的路段行程時間的估計方法主要是基于固定檢測器數據和浮動車數據進行路段行程時間估計[2]。采用固定檢測器采集交通信息是一種傳統的交通信息采集方法,其采集的交通信息具有準確度較高、樣本量較大的特征,且反映路段在連續的時間間隔內的交通狀況。而浮動車作為一種新型的城市交通信息采集平臺,能夠實現全方位、大范圍的交通信息采集,能夠反映整個路段甚至路網的交通狀況[3]。
然而,固定檢測器與浮動車技術在信息采集過程中均存在一定缺陷。就固定檢測器而言,由于其鋪設位置局限于城市路網的特定位置,因此有限的空間覆蓋率使得采集的交通信息無法反映城市路網的整體交通狀況;浮動車技術在數據信息精確度方面的限制主要表現在浮動車的時空隨機分布所導致的相當數量的觀測樣本缺失現象,以及無法實現連續時間間隔的數據采集。固定檢測器與浮動車的技術特征體現了二者在時間上和空間上的互補性[4],數據融合技術則能夠充分利用多源交通數據的特征,通過對各種信息的合理支配與使用,將互補信息合理組織起來,發揮不同數據在時間和空間上的特點,從而產生精度更高的融合結果。
本文在單一數據源的路段行程時間估計基礎上,利用自適應加權平均融合算法對單一數據源估計結果進行數據融合處理,實現路段行程時間的動態估計。并以大連市中心城區路網為研究對象,通過交通調查和仿真模擬相結合的方法,對融合計算結果進行對比分析。
1 基于單一數據源的路段行程時間估計
1.1 基于固定檢測器的路段行程時間估計
通過鋪設在城市主要道路上的固定檢測器,能夠實現流量、道路占有率、車輛瞬時速度等交通參數的檢測[5],進而實現路段行程時間的估計。Karl F.Petty等人利用交通流量、占有率和速度之間的關系,實現了路段行程時間的預測[6]。 根據HCM(2010)中對于路段行程時間的定義表明,利用固定檢測器所采集的流量、車輛瞬時速度等交通參數,可以估算路段行程時間[7],本文采用該方法進行基于固定檢測器數據的路段行程時間估計。
路段行程時間定義為:

式中:TR為車輛通過某一路段的行駛時間;TS為下游信號燈產生的平均延誤。假定固定檢測器檢測到的平均瞬時速度v為通過該路段的平均行駛速度,則

式中:D為路段長度。
假設不存在初始排隊附加延誤,則TS可表示為:

式中:d1為車輛均勻到達所產生的均勻延誤;d2為車輛隨機到達并引發超飽和周期所產生的隨機附加延誤[8]。
均勻延誤和附加延誤根據道路信息、交叉口信號燈配時以及路段流量計算得出:
式中:c為下游信號燈周期時長;q為下游信號燈有效綠燈時長;x為所計算車道的飽和度;CAP為所計算車道的通行能力;T為分析時段的持續時長;e為單個交叉口信號控制類型校正系數。
1.2 基于浮動車的路段行程時間估計
浮動車技術主要通過安裝有車載GPS定位裝置的車輛,采集行駛過程中位置坐標、瞬時車速等信息,根據這些信息能夠利用平均速度估計法得出車輛在每個路段上的平均行駛速度。
在同一統計時間段內,若浮動車j在路段i返回n個數據點(n≥1),則

則路段i在該統計時間段內的平均速度可表示為:
式中:T為該路段在該統計時間內采集到數據的浮動車輛數。
若路段i的長度為Di,則其路段行程時間可表示為

2 自適應加權平均融合估計
自適應加權平均融合估計是一種直接針對數據源操作的數據融合方法[9]。根據自適應加權平均融合基本理論,融合處理后的路段行程時間T可表示為:

式中:TG和TF分別為基于固定檢測器數據與浮動車數據的路段行程時間估計值;WG和WF為自適應權重,且WG+WF=1。

構造輔助函數:

因此,可得到方差σ2最小時的自適應權重:


由于n1、n2、T之間互不相關,且n1和n2的均值為零,所以T1、T2的互相關系數R12滿足

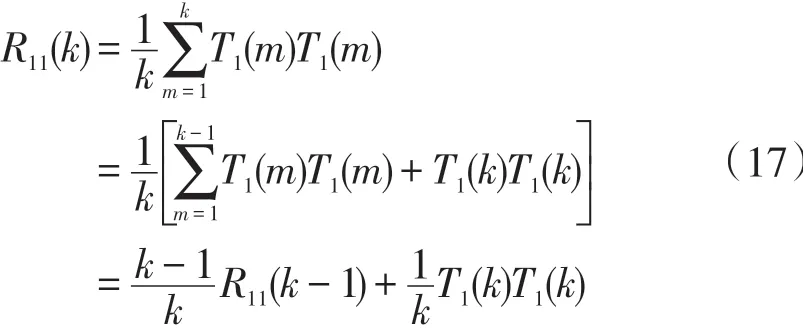
T1的自相關系數R11滿足


引入時間域估計值進行R12、R11的計算。假設檢測器當前路段行程時間估計結果個數為k,R11的時間域估計值為R11( )k,而R12的時間域估計值為R12( )k,則
同理,

考慮到實際應用中對于路段行程時間的動態估計要求,基于自適應加權平均融合的路段行程時間估計流程如圖1所示。

圖1 基于自適應加權平均融合的路段行程時間估計流程示意圖
3 模型驗證及結果分析
經過多次現場調查,本文選定由黃河路、太原街、勝利路和長春街圍成的大連市中心區路網區域為研究對象,研究區域如圖2所示,總面積約為5km2。本文采用交通調查和仿真模擬相結合的方法,旨在更為精確地收集現實條件下的固定檢測器和浮動車數據。
3.1 交通數據調查及仿真環境設置
本文根據VISSIM 仿真所需參數要求,對研究范圍內的交通信號燈配時以及高峰時段路段斷面交通量進行了調查,并在此基礎上建立仿真模型。交通數據調查在主干道分別選擇了32 個信號燈配時調查點(紅色方框)和20 個斷面交通量調查點(黑色短線),調查點的空間分布如圖3所示。
信號配時調查針對每個調查點進行相位和配時調查,調查結果直接作為VISSIM 仿真中的信號配時輸入信息。交通量調查采用視頻調查法,記錄每個調查點早高峰時段(7:30—8:30)通過調查斷面的車流量,交通量調查的結果作為設置VISSIM 動態分配模塊的原始數據。根據VISSIM 動態分配模塊的數據要求,其輸入數據為各主干道進出口小區之間的OD矩陣,因此,本文根據路網特征,將研究區域劃分為25個交通小區,利用Trans-CAD 將交通量調查所得各個小區的PA 矩陣轉化為OD矩陣,從而實現VISSIM的動態交通分配。

圖2 研究范圍
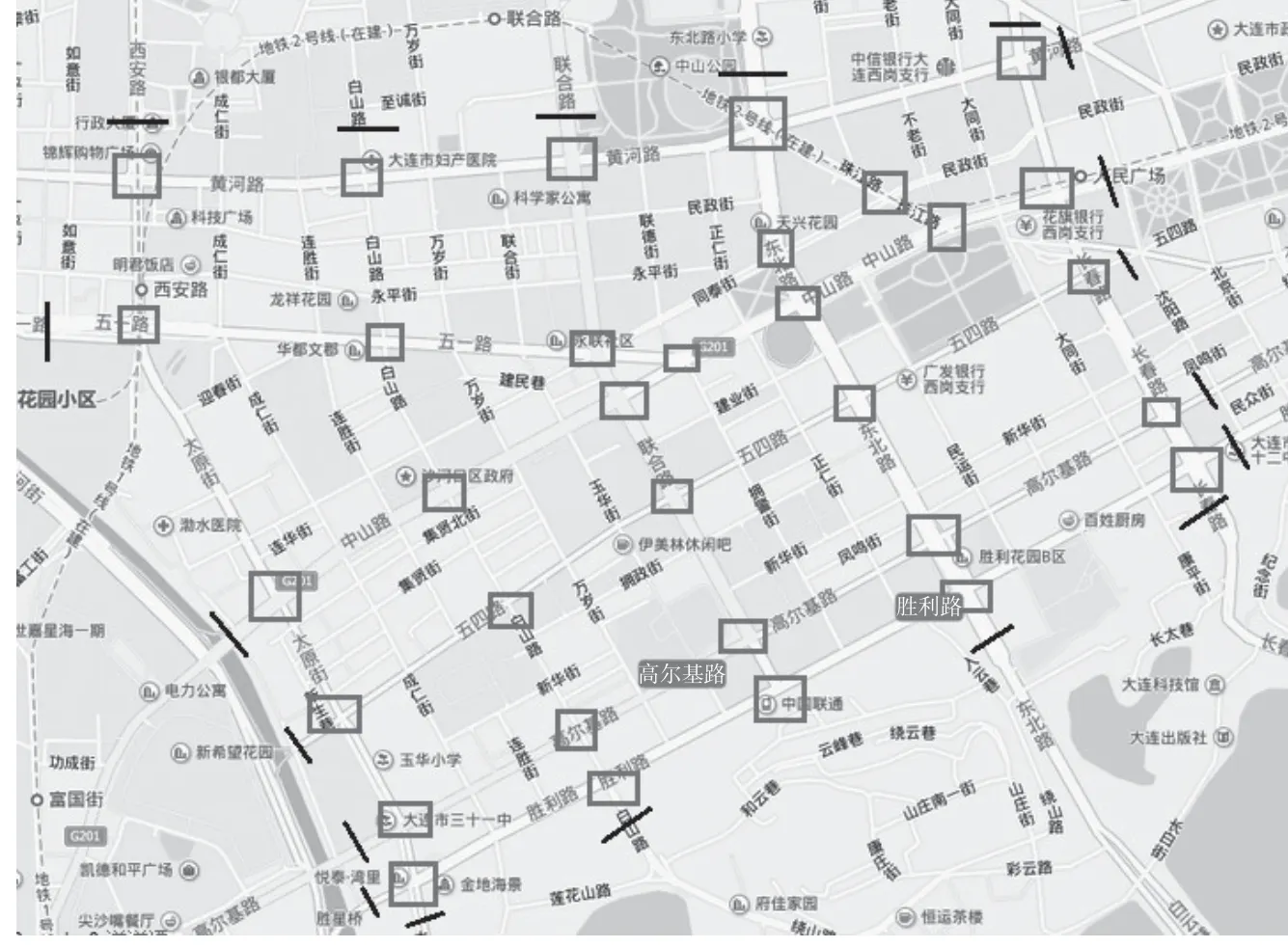
圖3 調查點空間分布
此外,仿真模型中浮動車比例設為5%,固定檢測器設置在各個主干道路段的中部[10],路段行程時間真值通過設置行程時間檢測器獲得。
3.2 結果對比及分析
為了更好地驗證融合模型的有效性,本文采用平均相對誤差(Average Relative Error)來衡量路段行程時間估計結果的精確度:

因此,單一數據源路段行程時間估計結果以及自適應加權平均融合估計結果的平均相對誤差(ARE)如表1 所示,其ARE 的計算結果為仿真路網所有路段行程時間估計結果的平均值。

表1 路段行程時間估計結果
如表1所示,基于浮動車數據的路段行程時間估計結果(0.236)優于基于固定檢測器數據的估計結果(0.309)。且在實際路網中,由于固定檢測器無法實現大范圍、高密度的鋪設,固定檢測器數據的完整性會受到影響。因此就基于單一數據源的路段行程時間估計而言,浮動車數據具有一定的優勢。但是,自適應加權平均融合估計能夠利用兩種數據之間的互補性,從而有效地提高路段行程時間的估計精確度,將平均相對誤差減少到0.214。
為了進一步驗證模型的穩定性,將VISSIM 仿真流量按比例縮小至高峰期交通量的80%和60%,在此情況下,路段行程時間的估計結果如表2所示。

表2 不同流量設置下的路段行程時間計算結果
如表2所示,基于固定檢測器數據的路段行程時間估計誤差隨著路網流量減少而呈現下降趨勢,而基于浮動車數據的路段行程時間估計則有所上升,且兩種估計結果的平均相對誤差均出現較大程度的波動(固定檢測器為0.033,浮動車為0.042)。自適應加權平均融合估計計算精度相對較為穩定(0.009),能夠滿足各種流量設置下較為精確的行程時間估計。
4 結論
本文在基于單一數據源行程時間估計基礎上,利用自適應加權平均融合估計模型,實現大連市中心城區路網路段行程時間的動態估計。計算結果顯示,自適應加權平均融合估計模型能夠有效提高路段行程時間估計的精確度,且能夠對不同流量條件路段行程時間動態估計。
本文在研究過程中,采用交通調查與VISSIM仿真環境相結合的方法,模擬了實際狀態下大連市中心城區的交通狀況。然而在實際路網中,固定檢測器無法實現如仿真中的大范圍、高密度的鋪設,浮動車數據也存在GPS定位偏差、數據缺失等問題。因此,如何在固定檢測器小范圍、低密度的鋪設條件下實現整個路網的路段行程時間估計,以及如何對實際浮動車數據進行地圖匹配和數據補充,仍需進一步研究。
[1] 沙云飛,曹瑾鑫,史其信.基于GPS的路段旅行時間和速度估計算法研究[C]//第一屆中國智能交通年會論文集.上海:同濟大學出版社,2005:145-151.
[2] 楊兆升,高學英.基于影響因素分類的路段行程時間融合研究[J].公路交通科技,2010,27(4):116-121.
[3] 王立曉,劉鍇,森川高行.淺析日本融合交通管制和浮動車信息的旅行時間預測[J].公路交通科技:應用技術版,2012,92(8):410-413.
[4] 王立曉,劉鍇,孫小慧,森川高行.基于多源數據融合的動態導航PRONAVI 系統[J].公路交通科技:應用技術版,2010,90(6):421-431.
[5] 于德新,楊兆升,劉雪杰.城市交通流誘導系統中的路段行程時間間接預測方法研究[J]. 交通與計算機,2006,6(24):18-21.
[6] Petty, K F, Bickel P, Ostland, M.etc. Accurate Estimation of Travel Times from Single Loop Detectors[J]. Transportation Research Part A,1998,32(1):1-17.
[7] Transportation Research Board. Highway Capacity Manual[M]. Washington, DC: Transportation Research Board, National Research Council.2010.
[8] 吳兵,李曄.交通管理與控制(4版)[M].北京:人民交通出版社,2008.
[9] 翟翌立,戴逸松.多傳感器數據自適應加權融合估計算法的研究[J].計量學報,1998,1(19):69-74.
[10] Mengying, C., Kai, L.Research on Installation Site of Loop Detectors for Link Travel Time Estimation[C]// Proceeding of The 10th Asia Pacific Transportation Development Conference. Beijing:ASCE,2014:139-145.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38