新型純電動汽車動力系統控制研究
2014-12-31 12:16:46周德明張炳力吳鑫平
汽車工程學報 2014年5期
周德明,張炳力,吳鑫平
(合肥工業大學 機械與汽車工程學院,安徽,合肥 230009)
行駛的汽車是一個由駕駛員-汽車-環境構成的閉環系統,駕駛員的操縱方式和汽車的行駛環境(外界路面環境、交通狀況等)決定了汽車的行駛狀態[1]。汽車縱向行駛過程中,駕駛員根據行駛環境的不同,使用感官采集汽車的行駛狀態信息,通過不斷地操作加速和制動踏板來實現對發動機輸出轉矩和整車制動力的控制,進而達到對整車車速的控制。因此,駕駛員的工作是一個不斷調節、反復修正的過程,相當于一個智能反饋控制器,極易使駕駛員感到疲勞。
近年來,在增強汽車可操作性和降低駕駛疲勞方面,國內外學者做了很多研究,就電動汽車動力系統控制而言,主要有:(1)電機驅動控制[2-6],電機輸出特性優化,尤其是線性化的力矩輸出特性和電機調速性能及抗擾動等方面的研究。(2)變速器換擋控制,包括換擋控制策略[7]和換擋機構優化及智能控制研究[8-9]。(3)整車傳動系控制,如整車控制策略[10-12]、匹配及協調控制的研究[13-14]等。這些研究都是在原動力控制模式基礎上進行的優化改進,在一定程度上使整車性能有所提高,其意義重大,但是前述的問題仍然沒有從根本上得到解決。為此,本文提出了一種新型實用的純電動汽車速度分級調控系統,其核心思想是利用速度的分級控制以及電子系統的閉環反饋自調節,代替駕駛員完成部分加速踏板修正的操作,實現對車速的半智能控制。
1 驅動系統控制原理
1.1 純電動汽車控制原理
純電動汽車使用電動機代替內燃機作為主要動力源,其控制系統框圖如圖1所示,取消了傳統汽車中的離合器結構,通過改變三相逆變器輸入到電機中的電流,實現對電機輸出轉矩和轉速的調節,而電機輸出的動力經機械連接的變速器、傳動機構到輪胎直接驅動汽車行駛,其動力響應相對傳統汽車更加快速、高效。
目前,純電動汽車動力控制策略依舊與傳統內燃機汽車控制策略保持一致,駕駛員通過操作加速踏板開度來調節動力源的轉矩輸出特性,從而實現對整車驅動行駛的控制;需要制動的時候,則通過制動踏板帶動制動回路,給車輪施加制動力矩,使車輛減速。這種整車控制策略使得在汽車縱向行駛的過程中,駕駛員必須不斷修正加速踏板,以保證汽車以一個良好的期望車速不斷行駛。駕駛員操作流程如圖2(a)所示,可以看出,駕駛員在行駛過程中操作繁瑣,需要反復調節加速和制動踏板,車輛控制效果不佳。
1.2 速度分級調控系統控制原理
本文提出的控制系統理想模型是通過加速踏板控制整車車速的單自由度車速控制系統模型。純電動汽車行駛時,首先檢測駕駛員輸入加速踏板的開度信號,通過速度分級表轉化成對應的定值目標車速,同時檢測車輪的轉速,形成整車車速閉環反饋控制。利用一體化控制器對電機和變速器進行耦合協調控制,協調電機和變速器轉矩、轉速輸出并實現適時換擋,優化系統的加速性能和動力輸出,最終達到電動汽車智能控速、平穩行駛的狀態。改變加速踏板區間,加減速的過程自動實現,其響應速度由路況、汽車動力性及控制算法共同決定。制動減速系統仍舊是機械動力系統結構,制動時切斷加速信號,其過程與傳統汽車一致。
該系統利用電子系統的閉環反饋調節,代替汽車行駛過程中駕駛員的反復調節過程,在一定程度上簡化了系統控制模式。不同的踏板開度對應相同的車速,隨著加速踏板開度變大,從一個區間進入另一個區間,目標車速增加,系統控制車速上升,這與駕駛員的駕駛感受和習慣都是一致的。其駕駛員操作流程如圖2(b)所示,避免了車速保持過程中的反復修正,大大簡化了駕駛員的操作,同時增強了電動汽車的可操作性和可靠性,降低系統能耗并提升道路行駛安全性。
2 速度分級調控系統實現方案
2.1 系統方案結構
純電動汽車速度分級調控系統結構示意圖如圖3所示,角度傳感器9采集加速踏板4和制動踏板8開度信號輸入給一體化控制器5,一體化控制器通過矢量控制方法調節逆變器7輸入到永磁同步電機1的電壓矢量來調整電機的輸出特性,同時通過控制換擋機構10的操作實現AMT11的適時自動換擋,取消了傳統汽車傳動系統中的離合器部件,電機輸出的力矩通過與之機械連接的變速器、傳動機構3,最終傳遞至車輪2驅動整車行駛,通過車輪轉速傳感器6反饋的車輪轉速信號,實現整車車速的實時反饋。
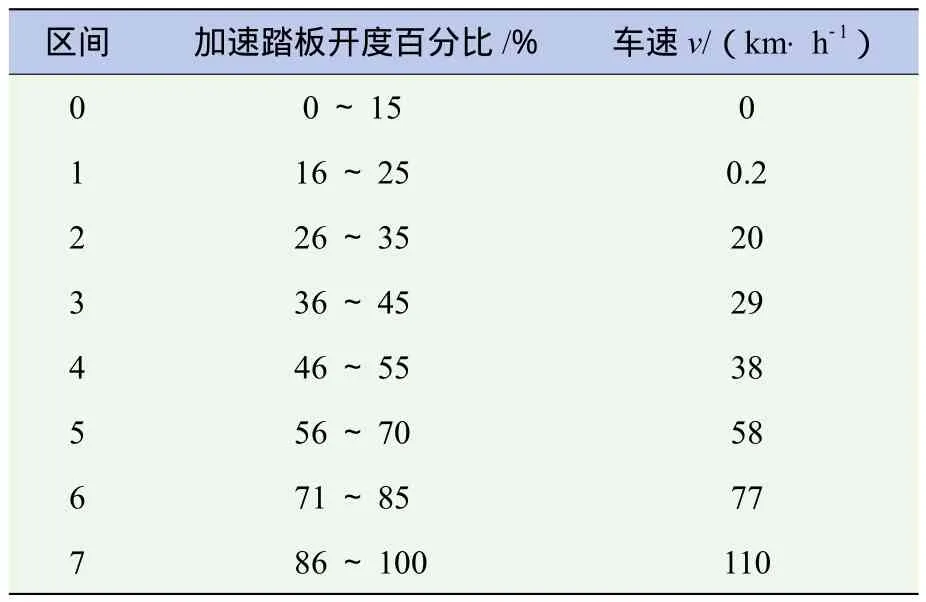
表1 速度分級表
2.2 系統目標車速的制定
參照我國對于特殊路段限速的標準和法規以及關于行車安全車速研究的相關文獻[15],綜合考慮良好路況的車速控制誤差和駕駛員駕駛習慣等因素,人為制定了系統的目標車速分級,見表1,共分為8個區間,汽車在達到穩定狀態下以下列車速穩定行駛。將加速踏板的開度百分比對應的目標車速固定化,作為整車分級調速的目標車速,簡化了整車動力系統的控制和換擋策略的制定,增強了系統的抗干擾性。
2.3 系統控制方法
在無風的天氣條件下,汽車在正常道路上行駛時,根據力的平衡關系,電動汽車的行駛方程式為
式中,m為整車質量;f為滾動阻力系數;為旋轉質量換算系數;a為車輛加速度;va為車速;CD為空氣阻力系數;A為車輛前部迎風面積;α為道路的坡度角;Ft為電動汽車的驅動力。
永磁同步電機的電磁轉矩方程如下:
式中,Te為電機的電磁轉矩;np為磁極對數;ψd、ψq分別為磁鏈在d,q軸上的分量;id,iq為定子d,q軸上電流分量;Ld,Lq為定子d,q軸上電感;ψf為轉子永磁體磁鏈。
為了使車輛快速響應目標車速達到穩態,并保持穩定的行駛狀態,系統針對不同路況輸出的轉矩應能夠實現自動調節,以達到驅動力與行駛阻力的平衡。永磁同步電機的輸出轉矩調節是系統控制的核心,它是對坐標變換后產生磁通的勵磁電流id和產生轉矩的轉矩電流iq進行解耦和獨立調節,如圖4所示,在轉矩電流電流環的基礎上,加入速度反饋形成轉矩速度雙閉環控制。速度環采用增量式的模糊PID控制器調節,可以使速度環具有速度脈動率小、頻率響應快、調速范圍寬等優點。
在速度環控制算法的選擇上,因為模糊控制可以引入專家經驗,而且不需要知道動力系統的精確數學模型,在速度保持和加速踏板區間變化時可以分別調節、平滑過渡,具有較好的適應性。單獨使用模糊控制不易消除達到目標車速穩態偏差,且對控制器運算性能要求較高,而PID算法簡單又可以較好地消除穩態偏差,但動態性能不佳,因此綜合兩者的優點,利用模糊控制實時修正PID參數,提高了系統的控制精度和魯棒性,具有良好的系統控制性能。
3 仿真結果與分析
為分析驗證所設計系統的性能,在Matlab7/Simulink環境下進行仿真。仿真所采用的電機為表面裝貼式永磁同步電機,其參數為:總質量m=45 kg,額定轉速N=3 000 r/min,額定輸出功率PN=18 kW,轉子永磁體磁鏈ψf=0.085 Wb,極對數np=4,額定轉矩TN=58 N·m,轉動慣量J=0.02 kg·m2。
本文設計的純電動汽車速度分級調控系統整體仿真模型如圖5所示,control模塊模擬仿真行駛工況負載和輸出駕駛員操作踏板開度,ECU模塊執行查表獲得目標車速及擋位控制,SVPWM模塊實現永磁同步電機的空間矢量控制,fuzzyPID模塊是針對不同路況制定的速度環和電流環反饋控制策略模塊,PMSM模塊包括永磁同步電機系統和信號輸出檢測兩部分,car模塊對應汽車行駛系部分建模。根據汽車行駛時的各個不同工況,選擇control模塊的仿真工況,設置仿真時間為10 s,分別對起步、加速、上坡、制動減速4種工況分別進行仿真。
仿真結果的整車車速和電機轉矩如圖6~9所示,由于電機的轉矩響應迅速,采用純電動汽車速度分級調控系統,駕駛員通過簡單操作加速踏板,就能夠控制整車車速,實現對與區間相對應的目標車速的跟隨,達到車速的平穩控制。
(1)起步過程,模擬駕駛員制動過程操作,加速踏板保持在第3區間,車輛平地起步,車速平穩上升至目標車速29 km/h,并保持。
(2)加速過程,加速踏板從在3 s時由第3區間階躍至第4區間,車速先保持,在3 s時逐漸由29 km/h上升到38 km/h。
(3)上坡過程,加速踏板保持在第2區間,車輛在2 s時駛上20°的斜長坡,車速小幅波動后穩定在目標車速20 km/h。
(4)制動過程,加速踏板先保持在第4區間,車輛行駛2 s后,間隔0.2 s后制動1.3 s,間隔0.2 s后,加速踏板最后保持在第2區間,車輛實現制動減速,車速由38 km/h迅速降至20 km/h并保持穩定。
4 結論
(1)本文設計的純電動汽車速度分級調控系統形成了整車車速的反饋閉環自動調節,它采用速度分級控制的思想,通過踏板區間控制車速,使駕駛操作簡便、高效。
(2)起步過程平穩快速,加速、上坡和制動減速3種典型工況下,整車車速都能在5 s內恢復到目標車速誤差±3%范圍內,該系統滿足車輛的實際行駛需求,是一種合理可行的純電動汽車動力系統控制方案。
(3)速度分級調控系統集成模糊PID控制,充分發揮了矢量控制電機轉矩的快速響應能力,轉矩響應小于0.1 s,具有實用性。
[1]葛安林,金輝,張洪坤,等.一種汽車智能換擋體系的研究[J].中國機械工程,2001,18(5):585-588.
Ge Anlin,Jin Hui,Zhang Hongkun,et al. Study of a Vehicle Intelligent Gearshift System [J]. China Mechanical Engineering,2001,18(5):585-588. (in Chinese)
[2]KAZEROONI M,HAMIDIFAR S,KAR N C. Analytical Modelling and Parametric Sensitivity Analysis for the PMSM Steady-State Performance Prediction [J]. Electric Power Applications,IET,2013,7(7):586-596.
[3]Li Shihua,Gu Hao. Fuzzy Adaptive Internal Model Control Schemes for PMSM Speed-Regulation System[J]. IEEE Transactions on Industrial Informatics,2012,8(4):767-779.
[4]溫旭輝,劉鈞,趙峰,等.車用高性能永磁電機驅動系統的研發[J].汽車工程,2011,33(10):880-884.
Wen Xuhui,Liu Jun,Zhao Feng,et al. Research and Development of High Performance Permanent Magnet Motor Drives for Electric Vehicles [J]. Automotive Engineering,2011,33(10):880-884. (in Chinese)
[5]FLIELLER D,NGAC K N,WIRA P. A Self-Learning Solution for Torque Ripple Reduction for Nonsinusoidal Permanent-Magnet Motor Drives Based on Artificial Neural Networks [J]. IEEE Transactions on Industrial Informatics,2013,61(2):655-666.
[6]何洪文,余曉江,孫逢春,等.電動汽車電機驅動系統動力特性分析[J].中國電機工程學報,2006,26(6):136-139.
He Hongwen,Yu Xiaojiang,Sun Fengchun,et al.Study on Power Performance of Traction Motor System for Electric Vehicle [J]. Chinese Journal of Electrical Engineering,2006,26(6):136-139. (in Chinese)
[7]GLIELMO L,IANNELLI L,VACCA V,et al. Gearshift Control for Automated Manual Transmissions [J]. IEEE/ASME Transactions on Mechatronics,2006,11(1):17-26.
[8]黃英,王憲強,萬國強,等.面向控制的自動變速器換擋過程動力學分析[J].汽車工程學報,2013,3(1):47-53.
Huang Ying,Wang Xianqiang,Wan Guoqiang,et al.Control Oriented Dynamics Analysis of Shifting Process for Automatic Transmission [J]. Chinese Journal of Automotive Engineering,2013,3(1):47-53. (in Chinese)
[9]甘海云,張俊智,盧青春,等.汽車動力傳動系統的換擋品質控制[J].汽車工程,2003,25(5):487-489.
Gan Haiyun,Zhang Junzhi,Lu Qingchun,et al. The Shifting Quality Control of Automotive Powertrain System[J]. Automotive Engineering,2003,25(5):487-489. (in Chinese)
[10]SEKOUR M,HARTANI K,DRAOU A,et al. Sensorless Fuzzy Direct Torque Control for High Performance Electric Vehicle with Four in-Wheel Motors [J]. Journal of Electrical Engineering & Technology,2013,8(3):530-543.
[11]周能輝,趙春明,辛明華,等.插電式混合動力轎車整車控制策略的研究[J].汽車工程,2013,35(2):99-104.
Zhou Nenghui,Zhao Chunming,Xin Minghua,et al.A Research on the Vehicle Control Strategy of a Plugin Hybrid Electric Car [J]. Automotive Engineering,2013,35(2):99-104. (in Chinese)
[12]KHAN H,MILIANI E,DRISSI K E K. Discontinuous Random Space Vector Modulation for Electric Drives:a Digital Approach [J]. IEEE Transactions on Power Electronics,2012,27(12):4944-4951.
[13]Yuan Xibo,Wang Jiabin. Torque Distribution Strategy for a Front and Rear-Wheel-Driven Electric Vehicle [J]. IEEE Transactions on Vehicular Technology,2012,61(8):3365-3374.
[14]王峰,方宗德,祝小元.純電動汽車新型動力傳動裝置的匹配仿真與優化[J].汽車工程,2011,33(9):805-807.
Wang Feng,Fang Zongde,Zhu Xiaoyuan. Matching Simulation and Optimization of the New Power Transmission Device for an Electric Vehicle [J]. Automotive Engineering,2011,33(9):805-807. (in Chinese)
[15]姜虹,李峰.不同路面條件下高速公路的停車視距建模與安全車速分析[J].西安工業大學學報,2012,32(1):25-30.
Jiang Hong,Li Feng. Analysis of Highway Parking Eyeshot Distance Modeling and Safe Speed Under Different Road Conditions [J]. Journal of Xi'an Technological University,2012,32(1):25-30. (in Chinese)
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
黃河之聲(2017年13期)2017-01-28 13:30:17
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
