基于MATLAB和ADAMS的轉臺系統聯合仿真
2015-01-03 03:55:14王會彬趙海娜鄭華山
軍民兩用技術與產品 2015年3期
王會彬 趙海娜 鄭華山
(北京航天光華電子技術有限公司,北京 100854)
基于MATLAB和ADAMS的轉臺系統聯合仿真
王會彬 趙海娜 鄭華山
(北京航天光華電子技術有限公司,北京 100854)
目前,對轉臺控制系統的研究主要采用通過建立一定的數學模型,然后利用MATLAB軟件進行軟件仿真,最終得出控制結果的方式進行。然而,數學模型往往與實物差別較大,導致控制模型不夠準確。研究表明,運用ADAMS軟件和MATLAB軟件分別建立機械系統的仿真模型和控制模型,然后進行聯合仿真,可在很大程度上避免由于數學模型不精確而帶來的控制誤差問題,為實際系統控制參數的調試提供理論參考,從而縮短系統的研發周期,使設計工作更加高效。
系統仿真,PI,速度環,位置環
引 言
ADAMS軟件可提供強大的建模、仿真環境,使用戶能夠對復雜的機械系統進行建模、仿真和分析,具有十分強大的運動學和動力學分析功能,被廣泛應用于工程領域,而MATLAB軟件則憑借其強大的計算功能,迅速成為算法設計和模型仿真不可缺少的工具。將ADAMS軟件和MATLAB軟件相結合進行聯合仿真,可將機械系統仿真分析與控制系統仿真設計有機結合起來,實現對機電一體化系統的聯合仿真分析,避免了僅僅應用數學公式去輔助建立復雜的機械系統模型,從而使機械系統模型更加準確,同時使控制算法更加有效、更加貼近實際。
1 轉臺系統介紹
整個轉臺系統由轉臺臺體和控制箱組成,臺體模型如圖1所示,主要有俯仰和方位2個自由度組成。其中,俯仰系統以步進電機作為執行驅動機構,方位系統以交流伺服電機作為驅動機構;根據實際需求,方位系統要求能夠進行360°連續旋轉,俯仰系統要求能在±10°內運動。

圖1 仿真轉臺模型圖
2 基于MATLAB軟件的控制仿真模型建立
2.1 模型簡化
由于ADAMS軟件在對機械系統進行運動學、動力學分析計算時,只考慮構件的質心和質量,而對各個構件的外部形狀不予考慮,因此,在建模過程中,對復雜系統和各個構件的外形進行精確描述并沒有太多的實際意義。所以,在采用ADAMS軟件建模之前,必須對物理樣機模型進行簡化處理。使用ADAMS軟件對機械系統建模及簡化,應遵循以下原則:(1)根據運動關系簡化模型,各個構件之間的運動副關系要表達清楚;(2)在不影響視覺效果的前提下,模型外形應盡量簡化;(3)多個構件固結時,可只用1個構件表示,以減少運動副數量。簡化后的模型由底座、俯仰平臺及方位平臺組成,如圖2所示。本模型采用SolidWorks軟件建立,將簡化的模型另存為“.x_t”格式,并導入到ADAMS軟件中。

圖2 轉臺簡化模型
2.2 創建輸入輸出變量
對導入的模型添加材料等屬性,底座和俯仰組件,以及俯仰組件和方位組件分別添加旋轉副,同時為俯仰組件添加單分量力。如圖3所示,以轉臺的俯仰角度控制為例,對于轉臺系統輸入的是轉矩,輸出的是俯仰平臺的轉動角度和角速度,因此,設置轉矩為系統的輸入變量,俯仰平臺的轉動角度和角速度為輸出變量(具體設置如圖4所示),加載ADAMS軟件的Controls模塊,設置輸入、輸出對象,選擇MATLAB軟件作為目標軟件,完成后會生成xx.m、xx.cmd、xx.adm等3個文件。
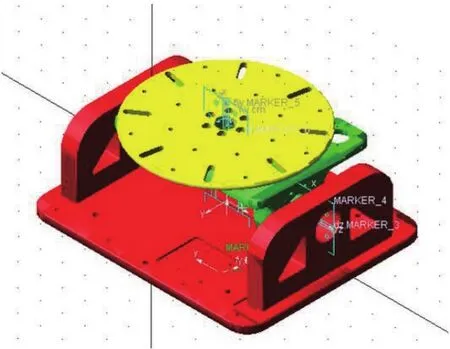
圖3 轉臺的ADAMS軟件模型
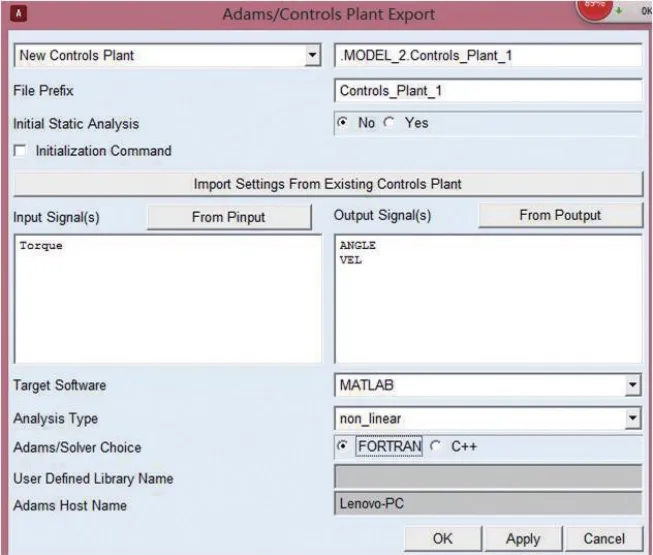
圖4 系統的輸入變量和輸出變量
2.3 導入ADAMS軟件模型
在MATLAB軟件的命令窗口中運行xx.m和adams_sys命令將ADAMS軟件模型導入到MALAB軟件的控制模型中,如圖5所示。其中,S-Function方框表示ADAMS軟件模型的非線性模型,即進行動力學計算的模型;State-Space表示ADAMS軟件模型的線性化模型,adams_sub包含非線性方程,也包含許多有用的變量;從adams_sub中可以看出,系統有1個輸入量及2個輸出量。

圖5 ADAMS軟件模型
3 系統聯合仿真
3.1 建立速度環仿真控制模型
以轉臺的俯仰角度控制為例,采用PI控制算法實現轉臺俯仰角度的準確位置控制。要實現對俯仰角度的準確位置控制,首先要對系統的內環,即速度環PI參數進行調試,建立系統的速度環控制模型,如圖6所示。

圖6 系統的速度環PID控制模型
經過不斷的調整,PI參數完成對速度環的準確控制,實驗結果如圖7、圖8和圖9所示,設置仿真時間為0.4s,目標速度為-10°/s。可以看出,系統在P= -500、I=25時,穩態誤差和響應時間較好。
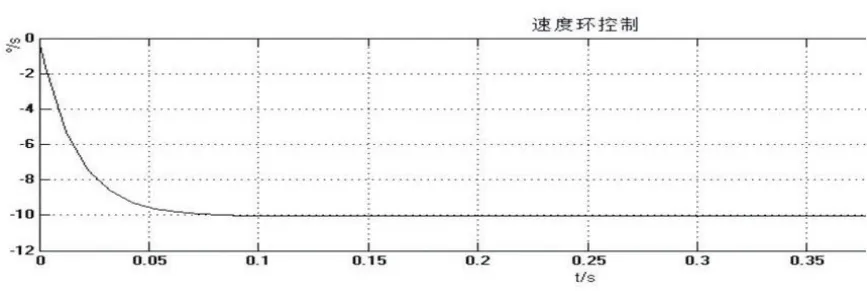
圖7 P= -500,I=25

圖8 P= -300,I=25
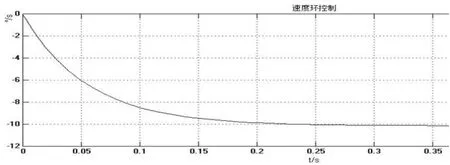
圖9 P= -150,I=25
3.2 建立位置環仿真控制模型
速度環是系統的內環,位置環是系統的外環,在速度環模型的基礎上,建立系統的位置環PI控制模型,如圖10所示。通過速度環的調試,最終選取速度環的控制參數P為-500,I為25。

圖10 位置環PI控制模型
經過不斷的調整,PI參數完成對位置環的準確控制,實驗結果如圖11、圖12和圖13所示,設置仿真時間為0.4s,目標位置為30°。可以看出,系統在P=30,I=1時,雖然響應較快,但存在超調現象;P=10時,系統響應較慢;綜合比較,最終控制參數選取P=20,I=1。
5 結 論
通過ADAMS軟件機械系統模型和MATLAB軟件控制模型的建立,實現了2個軟件的聯合仿真,提高了設計效率,降低了開發成本,其機電一體化系統的整體性能也得到了優化,為實際系統的調試提供了理論依據,能夠更好地解決調試中遇到的各種問題。

圖11 P=30,I=1

圖12 P=20 ,I=1

圖13 P=10 ,I=1
1 鄭建榮. 虛擬樣機技術入門與提高[M]. 北京: 機械工業出版社, 2005
2 周淵深. 交直流調速系統與MATLAB仿真[M]. 北京: 中國電力出版社, 2003
3 張琛. 直流無刷電動機原理及應用[M]. 北京: 機械工業出版社, 2001
Combined Simulation of Turntable System Based on ADAMS and MATLAB
Wang Huibin Zhao Haina Zheng Huashan
(Beijing Aerospace GuangHua Electronics Technologies Limited Corporation, Beijing 100854)
At present, the study of the turntable control system usually performs like this: establish the mathematical model first, and then, the simulation analysis is executed in MATLAB software. However, the mathematical model is always greatly different from actual conditions, which leads to the inaccuracy of the control model. The simulation models of mechanical system and control model of the turntable system are established by ADAMS software and MATLAB software respectively, and then the co-simulation technology is performed here with ADAMS and MATLAB. The co-simulation results show that the control accuracy and the design efficiency can be improved greatly. In addition, the co-simulation method has provided a theoretical reference for system debugging in practice.
System simulation, PI, Speed loop, Position loop
1009-8119(2015)03(1)-0056-03
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年19期)2017-02-02 07:08:38