起飛一發失效應急程序路徑選擇研究
2015-01-06 03:44:42付文勇
中國科技信息 2015年8期
付文勇
從安全性和經濟兩個方面分析了起飛一發失效應急程序的重要性,結合國內外一發失效應急程序的設計規范、運行要求和航空公司運行實踐經驗,提出了起飛一發失效應急程序的總體設計流程。針對手工選擇路徑的不足,提出用基于SRTM3 數據的A 星網格搜索算法自動尋找EOSID 路徑,案例研究表明該算法能自動搜索出符合條件的EOSID 路徑。
起飛一發失效應急程序概述
安全和效益是民航發展的永恒主題。安全和效益又是一對矛盾體,在傳統的粗獷的民航運作模式下,保證安全就可能犧牲效益,而提高效益就有可能有損安全。現代交通運輸系統中,動車和高鐵迅猛發展,其快捷性和方便性已對民航發展造成較大沖擊,尤其是對500km 距離圈內的支線航線。那么,國內民航運輸要生存和發展就有兩個選擇,降低成本或開辟有價值的復雜地形地區的航線。在復雜地形地區開辟航線,安全和效益的矛盾就更加凸顯。一發失效應急程序(EOSID)的研究和設計,就是在滿足航空法規的限制下解決該問題的手段之一。
一發失效應急離場程序是相對于標準儀表離場程序(SID)而言的,它采用有別于制作SID 的設計規范和參數,使得保護區內的障礙物通常都少于SID 程序保護區內的障礙物,或者采用有別于SID 的離場航跡從而提供更多的越障距離或更少的需要超越的障礙物,以此來滿足法規限制的越障要求,并提高飛機起飛重量,從而為航空公司帶來經濟效益。
隨著我國民航運輸的發展和西部大開發的推進,廣大西部地區對航空運輸的需求日益迫切,而這些地區往往地形復雜、氣象條件惡劣且海拔較高。如西藏林芝機場,海拔2949m,屬于高原機場;周圍都是高山峻嶺,飛機起降只能在狹窄彎曲的河谷中飛行,飛行航道最窄處距離峽谷兩側山脊不到4km;機場多低云天氣,風切變頻繁,飛機只能利用上午時刻起降,全年適航時間累計僅有100d。要在這樣的機場運行,民航局規定航空承運人必須設計相應機型的起飛一發失效應急程序。
起飛一發失效應急程序設計策略
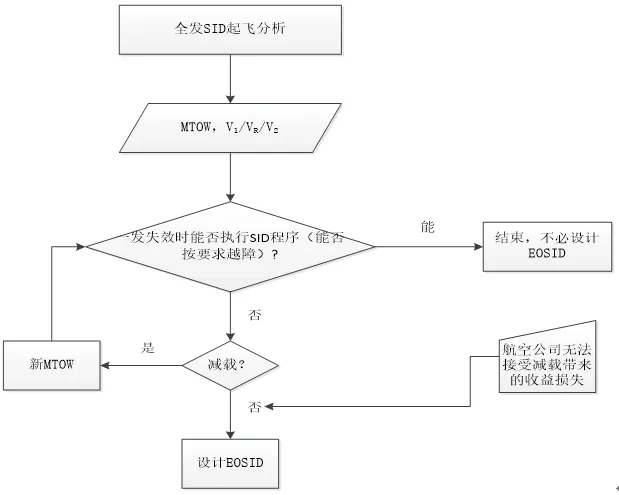
圖1 進行EOSID 設計之前需要進行的性能評估流程圖
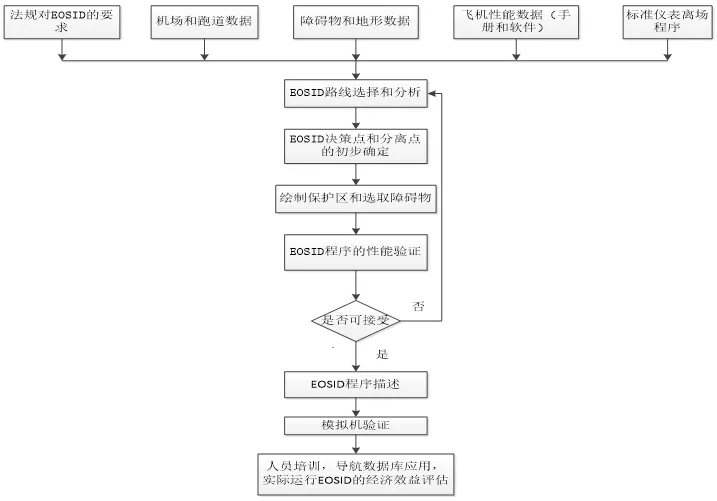
圖2 EOSID 設計流程圖
國際上起飛一發失效應急程序的研究始于20 世紀80 年代,但由于商業保密的原因,直到90 年代才有相關資料公布。歐洲的Monique Fueri 在《SIDs and EOSIDs》中對標準儀表離場程序和起飛一發失效應急程序進行了比較分析。2002 年,空客公司的一發失效應急程序工作小組在《AIRBUS EXERCISE GUIDEBOOK》中舉例分析了一發應急程序的制作方法。參考文獻結合作者豐富的EOSID 設計經驗,分析了設計過程中風的影響和轉彎梯度損失的問題。民航局最新頒發的咨詢通告《飛機起飛一發失效應急程序和一發失效復飛應急程序制作規范》,統一了水平保護區范圍和垂直越障要求。
本文在閱讀研究了大量一發失效應急程序相關文獻的基礎之上,結合設計經驗,提出了一種設計一發應急程序的總體流程和思路,見圖1 和圖2。
由圖可看出,起飛一發失效應急程序設計需要收集大量原始資料,然后結合標準儀表離場程序和機場周圍地形情況,初步勾勒出能夠避開高大障礙或提供更多爬升距離的路線。可見,EOSID 設計是一個循環迭代的過程。如果初步設計的EOSID 程序不能達到增加商載的目的時,就需要重新選擇路徑,并進行越障分析。
起飛一發失效應急程序設計中最重要的就是要找到一條合理的路徑,使之能夠提供更多的爬升距離或飛越較少較矮的障礙物,從而在滿足安全的前提下提高商載。
但是,目前EOSID 的路徑選擇幾乎全是由人工地圖作業得出的。此項工作必須由富有經驗的性能工程人員和程序設計人員來完成,并且要經過多次人工迭代試算和飛機性能驗證,人力物力耗費過大。而且,由此設計出的起飛一發失效應急程序軌跡受人為主觀經驗的影響較大。為了解決這些問題,受到網絡搜索法和機器人路徑搜索法的啟發,本文提出了用基于網格搜索的A 星算法來自動尋找EOSID 的路徑。
起飛一發失效應急程序路徑選擇算法研究
搜索空間的數據來源SRTM3
本文利用SRTM3 提供的高程數據作為數字地圖數據,進行EOSID 路徑搜索仿真。
SRTM 地形數據是由美國、德國和意大利三國聯合測量處理和發布的。SRTM 的全稱是Shuttle Radar Topography Mission,即航天飛機雷達地形測量使命。美國的“奮進號”航天飛機于2000 年2 月發射升空,目的是利用合成孔徑雷達對全球地表進行精確測量。經過長達11d 的測量,共采集了原始雷達影像數據9.8 萬億字節,即近12TB。經過長達2 年多的數據處理,完成了全球數字高程模型數據的制作。SRTM 數字高程模型數據是迄今為止最為完整和精確的數字地形數據,水平精度達到±20m,垂直精度達到±16m。發布的SRTM由若干個文件組成,每個文件中存儲了一個經緯網格的地形數據。在每個經緯網格中,每隔1arc-second 和3arcsecond 進行采樣,于是最小分辨單元就有30x30 和90x90 兩種形式。所以,在SRTM 產品中,就有SRTM1和SRTM3 兩類。目前公開對外發布的只有基于SRTM3 的各種產品。
基于網格搜索空間的A星尋徑法
A 星算法是一種啟發式搜索算法。啟發式搜索就是一邊搜索一邊評估出相對較好的位置,然后再從該位置進行搜索并不斷評估和更新,直到找到目標。啟發式搜索方式可以解決狀態空間非常巨大或狀態空間不可預測的搜索問題,并能夠減少很多不必要的搜索路徑,從而縮短了搜索時間。在所有啟發搜索算法中,代價評估函數是十分重要的。A 星算法估計函數的基本形式如下:

式中,g(n)是起點到節點n 的實際代價,它等于節點n 的父節點的g 值加上父節點到節點n 的單步代價值。
h(n)是節點n 到目標點的路徑估計代價。
A 星算法基本思想是:首先確定起點,把起點作為一個中心點。然后搜索該中心點的所有相鄰點(稱為周邊節點),計算到所有周邊節點各自的實際代價g 和路徑估計代價h,從而計算出估計值f。
然后,創建兩個容器,分別稱為open 和close。open 用來存放要進行評估計算的點,開始時open 中只放入一個元素,就是起點。close 初始化為空值,它用以存放每一步的中心點(父節點)。當進行第一輪搜索之前,把起點的所有周邊節點都放入open 表中,并以計算出的估價值f 進行排序。找出代價最小的節點作為下一輪計算的父節點,并把該輪計算的父節點存入close 中。
新一輪搜索,尋找出上一輪搜索得出的父節點的所有周邊節點。在這些節點中,跳過障礙物及不可通過的節點;然后檢查除障礙物之外的所有周邊節點是否都已在open表中,把沒有在open 中的周邊節點加入open 表中。對于已經在open 表中的本輪中心節點的周邊節點,要計算其新的g 值,并與上一輪的g 值作比較。若新g 值更小,則把該節點改作當前父節點,并重新計算f 值。否則,不改變當前父節點。比較open 表中各節點的估價值f,找出f 值最小的節點作為下一輪搜索的父節點,并把當前父節點加入到close 表,然后將其從open 表中刪除。重復搜索,直到達到終點或搜索完整個區域。
本文設計的算法流程圖如圖3。
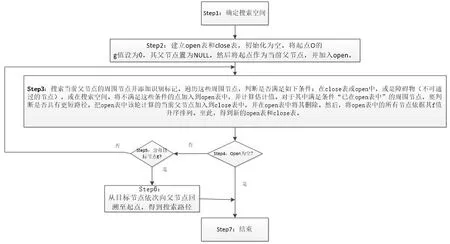
圖3 算法流程圖
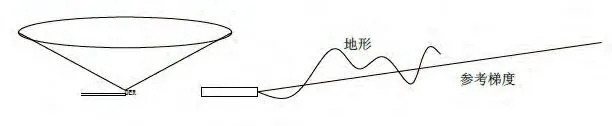
圖4 圓錐確定搜索區域示意圖
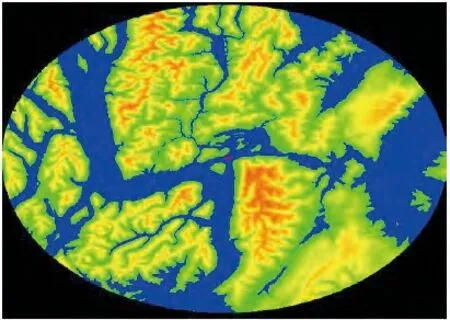
圖5 2%梯度確定的搜索區
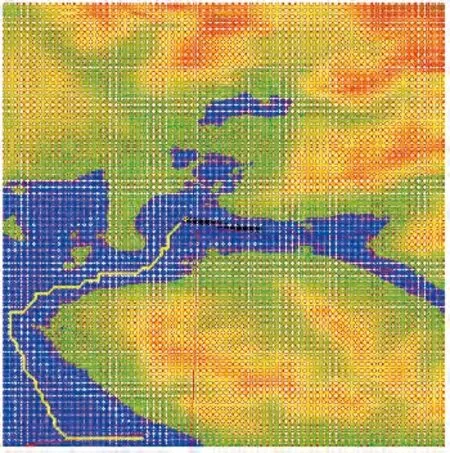
圖6 EOSID 軌跡生成
案例研究
根據前面研究的基于網格空間的A 星尋徑算法,首先確定搜索區域,進行網格的劃分和地形障礙物的標定。
一種確定搜索區域的劃分方法是“梯度圓錐法”。以跑道離場末端DER 為圓錐頂點,以與水平面成某一梯度的圓錐向上散開,如圖4 所示。機場周圍的地形,若穿透圓錐面都將被認為是障礙物,障礙物的水平大小以與圓錐面的交線為界。低于該梯度圓錐面的地形不予以搜索。如下圖,以某機場為例,搜索起點確定為跑道的DER 點,終點為跑道南端的一點。數據來源于SRTM3 高程數據,用Global Mapper 軟件進行預處理。藍色區域是低洼地形區域,不存在障礙物。圖5 所示為2%梯度時的搜索區域。
確定好搜索區并標識障礙物后,需要進行網格節點劃分。這里,根據SRTM 數據,以90x90m 劃分網格。
然后,確定A*算法的代價函數f。公式5.1:


算法仿真結果如圖6 所示。
案例分析中,成功地自動找到了一條路徑,該路徑能夠避開所設障礙物,并以較短的距離到達預定的起飛一發失效應急程序的終點。
總結
本文在閱讀研究了大量一發失效應急程序相關文獻的基礎之上,結合設計經驗,提出了一種設計一發應急程序的總體流程和思路。然后針對目前手工選擇起飛一發失效應急程序路徑時出現的問題,重點研究了基于SRTM3數字數據,用A 星算法自動搜索EOSID 軌跡的方法。案例研究表明,該方法能尋找到避開障礙物的航跡。在下一步研究中,可改進A 星算法的代價函數以進一步優化A 星算法,更快地搜索到最優的EOSID 路徑,從而為設計起飛一發失效應急程序提供更有力的支持。在未來的EOSID 程序設計中,智能自動選擇必將成為路徑選擇的趨勢,手工選擇路徑的方式將會逐漸被替代。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
人大建設(2019年12期)2019-05-21 02:55:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2015年3期)2015-11-19 02:53:32
