基于總體最小二乘的多基地聲納系統(tǒng)定位算法
2015-01-13 01:53:04屈也頻梅風(fēng)華
探測(cè)與控制學(xué)報(bào) 2015年3期
關(guān)鍵詞:測(cè)量
李 濤,屈也頻,梅風(fēng)華
(海軍裝備研究院航空裝備論證研究所,上海 200436)
0 引言
多基地聲吶定位技術(shù)由于其在覆蓋范圍、定位精度、抗隱身能力和戰(zhàn)術(shù)使用上的優(yōu)勢(shì),已成為現(xiàn)階段聲吶技術(shù)領(lǐng)域研究的熱點(diǎn)[1-2]。現(xiàn)有的多基地聲吶系統(tǒng)通過(guò)獲得目標(biāo)的方位角、距離和多普勒頻移等測(cè)量結(jié)果,結(jié)合目標(biāo)與多基地聲納的相對(duì)位置關(guān)系解算出目標(biāo)坐標(biāo)[3-7],但這種算法受測(cè)量誤差影響,在某些區(qū)域定位性能非常差。在多基地情形下,利用不同接收站的測(cè)量信息存在數(shù)據(jù)冗余的特點(diǎn),充分利用各個(gè)接收站所獲得的測(cè)量數(shù)據(jù)可以改善這種現(xiàn)象[8],文獻(xiàn)[9]和[10]則從提高測(cè)量信息利用率的角度,分別研究了基于卡爾曼濾波的單枚、多枚被動(dòng)定向浮標(biāo)定位算法,但共同的缺點(diǎn)是需已知測(cè)量信息的誤差模型。針對(duì)常規(guī)解算法進(jìn)行多基地聲納系統(tǒng)定位時(shí),定位精度和穩(wěn)健性受測(cè)量誤差影響嚴(yán)重的問(wèn)題,提出基于總體最小二乘法的多基地聲吶定位算法。
1 多基地定位原理
以T-R3型多基地聲吶系統(tǒng)為例,考慮到聲納作用距離通常要高出探測(cè)目標(biāo)深度一個(gè)數(shù)量級(jí)以上,即目標(biāo)的垂直向的俯仰角很小,故只在水平坐標(biāo)內(nèi)考慮定位,以發(fā)射站為原點(diǎn)建立二維直角坐標(biāo)系,各基站的幾何關(guān)系如圖1所示。
根據(jù)圖1所示的幾何關(guān)系,可得目標(biāo)的定位方程如式(1)。
式(1)中,ρi=vτi,為發(fā)射站與第i個(gè)接收站之間的傳播距離,v為水中聲速,τi為發(fā)射站與接收基站之間的傳播延時(shí),通過(guò)收發(fā)基地時(shí)間同步后,可以實(shí)現(xiàn)時(shí)延的測(cè)量。易知具有相同ρi 的目標(biāo)的軌跡集合構(gòu)成等時(shí)到達(dá)橢圓;θi由浮標(biāo)定向測(cè)出,具有相同θi的目標(biāo)軌跡集合構(gòu)成過(guò)接收站點(diǎn)的直線。易知式(1)方程組存在雙解,為消除模糊性,實(shí)際情況下可以通過(guò)附加浮標(biāo)作用距離信息、多址數(shù)據(jù)融合以及目標(biāo)軌跡連續(xù)等方法予以消除。
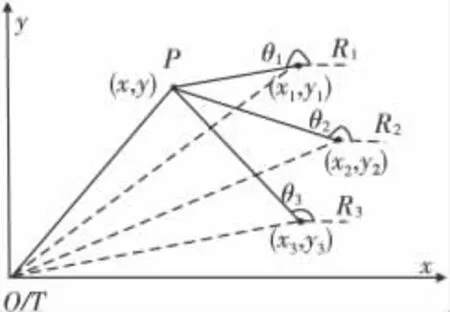
圖1 多基地聲納系統(tǒng)定位原理Fig.1 Position principle of multistatic sonar
由于ρi、θi及xi、yi均存在測(cè)量誤差,式(1)的解算結(jié)果會(huì)出現(xiàn)誤差,甚至無(wú)解,這在目標(biāo)靠近發(fā)射站與接收站連線(基線)時(shí)會(huì)更加突出,這是由于此時(shí)式(1)的第一個(gè)方程由于測(cè)距誤差的存在而不成立所致。當(dāng)存在多個(gè)接收站同時(shí)檢測(cè)到目標(biāo)時(shí),可通過(guò)信息綜合處理技術(shù)提高定位精度,最簡(jiǎn)單的情況是對(duì)各個(gè)接收站的解算結(jié)果取平均
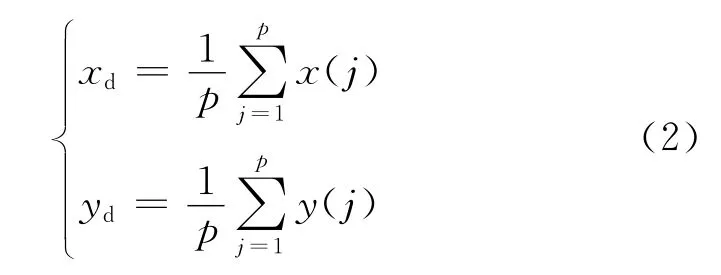
式(2)中,x(j)、y(j)為第i個(gè)有效接收站方程的解,xd、yd為綜合后的解算結(jié)果,p 為存在有效解的接收站數(shù)目。
2 基于總體最小二乘的定位算法
式(1)、式(2)的定位算法受ρi、θi及xi、yi的測(cè)量誤差影響較大,在多個(gè)接收站同時(shí)檢測(cè)到目標(biāo)的情形下,由于存在冗余探測(cè)信息,為了綜合利用不同接收站的測(cè)量信息,引入總體最小二乘方法來(lái)解決目標(biāo)定位問(wèn)題,其實(shí)現(xiàn)原理為:將測(cè)量方程進(jìn)行一定的數(shù)學(xué)變換,消去二次項(xiàng),得到一組新的線性方程組。線性方程組的總體最小二乘解就是目標(biāo)的位置估計(jì)。
將式(1)消去二次項(xiàng)得
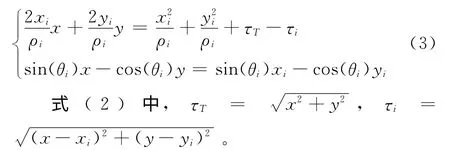
利用兩個(gè)接收站的測(cè)量結(jié)果消去未知量τT、τi,可得
因此,利用多個(gè)接收站的測(cè)量結(jié)果可以建立線性方程組

其中An×2、Bn×2為n×2維矩陣,dn、hn為n 維向量,n為接收站數(shù)目,且


式(4)實(shí)際上是一組超定方程,通常可以通過(guò)最小二乘法來(lái)求解。觀察式(5)和式(6),由于ρi、θi及xi、yi均存在測(cè)量誤差,導(dǎo)致An×2、Bn×2及dn、hn均存在誤差,由于最小二乘法求解的過(guò)程只考慮將dn及hn的誤差最小化,不適合An×2、Bn×2均存在誤差的情形,因此下面基于總體最小二乘算法來(lái)求解式(4)。
將式(4)改寫(xiě)為:
令
總體最小二乘法的求解過(guò)程即考慮誤差矩陣En×3,使得解,取最小特征值對(duì)應(yīng)的特征向量u,則

1)確定初始值u0、a,其中u0為任意3維向量

可見(jiàn)總體最小二乘法考慮的是將An×2、Bn×2及dn、hn的總體誤差最小化,因而更適 合式(4)的求解。
求解總體最小二乘解需對(duì)GTn×3Gn×3進(jìn)行特征分
3 計(jì)算機(jī)仿真
仿真試驗(yàn)通過(guò)式(1)、式(2)的直接解算法和基于冪迭代的總體最小二乘法來(lái)比較驗(yàn)證。
試驗(yàn)1 設(shè)接收站個(gè)數(shù)為3,接收站坐標(biāo)(5.4km,-8.4 km)、(10 km,0)、(5.4 km,8.4km),目標(biāo)坐標(biāo)為(5km,2km),浮標(biāo)散布范圍分別服從100 m、1 000 m 和2 000 m 內(nèi)的均勻分布,測(cè)向和測(cè)距誤差服從正態(tài)分布,對(duì)不同測(cè)向和測(cè)距方差下的定位方差進(jìn)行1 000次蒙特卡羅仿真,圖2給出了仿真的結(jié)果。
圖2的結(jié)果顯示,直接解算法在測(cè)距誤差及浮標(biāo)散布范圍增大時(shí)定位誤差迅速增大,顯示其對(duì)測(cè)距誤差和浮標(biāo)散布范圍非常敏感。采用總體最小二乘法較之直接解算法具有更好的定位精度,且穩(wěn)定性遠(yuǎn)高于直接解算法,尤其是在測(cè)距誤差及浮標(biāo)散布范圍較大時(shí),總體最小二乘法顯示出抑制誤差的優(yōu)異性能。
試驗(yàn)2 設(shè)接收站個(gè)數(shù)為3,接收站坐標(biāo)(5.4km,-8.4 km)、(10 km,0)、(5.4 km,8.4km),改變目標(biāo)坐標(biāo)為(9.5km,0.5km),此時(shí),目標(biāo)更加接近發(fā)射站與接收站連線。設(shè)浮標(biāo)散布范圍分別服從100m、1 000m 和2 000m 內(nèi)的均勻分布,測(cè)向和測(cè)距誤差服從正態(tài)分布,對(duì)不同測(cè)向和測(cè)距方差下的定位方差進(jìn)行1 000次蒙特卡羅仿真,圖3給出了仿真的結(jié)果。
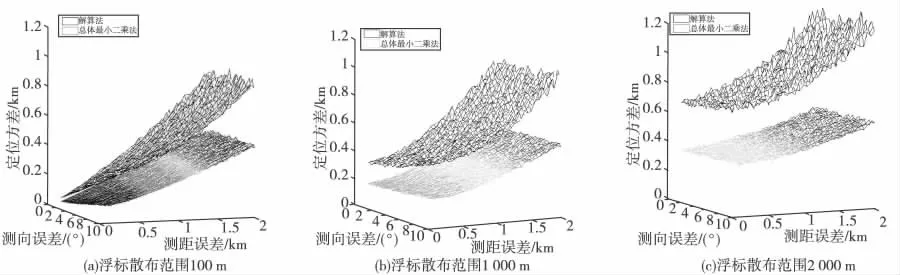
圖2 給定浮標(biāo)散布范圍時(shí)不同測(cè)向和測(cè)距誤差下的定位方差Fig.2 Positionvariance for different direction and distancemeasure error when specify buoy spread area

圖3 給定浮標(biāo)散布范圍時(shí)不同測(cè)向和測(cè)距誤差下的定位方差(目標(biāo)靠近基線)Fig.3 Positionvariance for different direction and distance measure error when specify buoy spread area(target near baseline)
圖3顯示結(jié)果與實(shí)驗(yàn)1相似,總體最小二乘法較之直接解算法具有更好的精確性和穩(wěn)定性。同時(shí),由于目標(biāo)處在基線附近,采用式(1)解算時(shí),會(huì)出現(xiàn)無(wú)解的情形,且出現(xiàn)無(wú)解情形的頻數(shù)隨測(cè)距誤差的增大而增大,但采用總體最小二乘法時(shí),由于其能很好的擬合測(cè)量數(shù)據(jù),即使是目標(biāo)處在基線附近且測(cè)距誤差較大的情形,依然能夠取得很好的定位精度,具有更好的穩(wěn)健性。
4 結(jié)論
本文提出了基于總體最小二乘法的多基地聲納系統(tǒng)定位算法,該算法首先將測(cè)量方程進(jìn)行一定的數(shù)學(xué)變換,得到一組新的線性方程組。通過(guò)求解線性方程組的總體最小二乘解估計(jì)目標(biāo)位置。仿真表明較之常規(guī)的解算法能夠取得更好的定位精度和穩(wěn)定性,同時(shí)解決了目標(biāo)處在基線附近,常規(guī)解算法隨測(cè)距誤差的增大而會(huì)出現(xiàn)無(wú)解情形的問(wèn)題。
[1]Coraluppi S.Multistatic sonar localization[J].IEEE Journal of Oceanic Engineering,2006,31(4):964-974.
[2]Sergey S.Localization in airborne multistatic sonars[J].IEEE Journal of Oceanic Engineering,2008,33(3):278-288.
[3]胡柱喜,孫明太,蘇維國(guó).被動(dòng)定向浮標(biāo)LOFIX 定位精度分析[J].電光與控制,2009,16(12):26-29
[4]孔銀壘,王英民.DIFAR 浮標(biāo)反正切目標(biāo)方位估計(jì)方法[J].聲學(xué)技術(shù),2010,29(4):370-373
[5]王雋,王英民,陶林偉.浮標(biāo)定位算法的仿真研究[J].聲學(xué)技術(shù),2009,28(6):95-98
[6]楊蕾.被動(dòng)型聲納浮標(biāo)定位技術(shù)研究[D].哈爾濱:哈爾濱工程大學(xué),2009.
[7]白菊蓉,毛永毅,張寶軍.多基地雷達(dá)空間定位算法和精度比較[J].西安郵電學(xué)院學(xué)報(bào),2008,13(1):18-21.
[8]侯志國(guó),何強(qiáng),羅曉松.聲探測(cè)多傳感器多目標(biāo)定位與跟蹤方法[J].電聲技術(shù),2010,34(9):40-42.
[9]陶林偉,王英民.一種新的單枚被動(dòng)定向浮標(biāo)目標(biāo)定位方法[J].兵工學(xué)報(bào),2011,32(3):365-369
[10]陶林偉,王英民.基于擴(kuò)展卡爾曼濾波的DIFAR 浮標(biāo)陣定位算法及分析[J].西北工業(yè)大學(xué)學(xué)報(bào),2009(5):738-744
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00