超混沌系統的反同步研究
2015-01-13 04:32:21李賢麗張超穎竇雪瑩
化工自動化及儀表 2015年5期
李賢麗 張超穎 竇雪瑩
(東北石油大學,黑龍江 大慶 163318)
混沌運動是發生在確定的非線性系統中的一種隨機行為,其對初始條件高度敏感,具有復雜的動力學性質,且難以預測,目前廣泛地應用于物理學、地質學、生物學、化學及保密通信[1]等工程領域中。混沌在發現之初是用來解釋某些自然和物理現象的,如蝴蝶效應及天氣預報等。近年來,人們開始控制和應用混沌,混沌控制的主要方法有線性反饋法[2]、周期擾動與激勵控制[3]、參數擾動法。基于混沌控制的方法,在一定條件下,構造出四維自治超混沌系統,超混沌系統與混沌系統相比具有更為復雜的動力學行為,它具有兩個或兩個以上正的李雅普諾夫指數,拓撲結構更為復雜,動態行為更加難以預測,更難被破解。將超混沌同步技術應用于保密通信系統時,有著更強的保密性能。混沌信號應用于保密通信是要把有用信號隱藏在混沌信號里,再在接收端提取出有用信號,可以直接利用混沌通信,也可以利用混沌同步實現通信,所以對超混沌同步方法的研究也極為重要。混沌同步是混沌控制的一種特殊形式,混沌系統的同步類型有完全同步、投影同步、反同步[4,5]及相同步[6]等,混沌同步方法有自適應同步法[7]、反饋同步法[8]、基于狀態觀測器廣義投影同步法[9]和脈沖同步法[10]。
筆者針對超混沌liu系統,采用基于狀態觀測器法和反饋法設計合適的觀測器和控制器,從理論分析和數值計算兩個角度出發,研究超混沌系統在不同初始值條件下的反同步問題。同時,通過同步曲線和誤差曲線,比較兩種方法的不同之處。
1 基于狀態觀測器法實現反同步①
超混沌系統具有兩個正的李雅普諾夫指數,與三維混沌系統相比具有更加復雜的拓撲結構,所以其動力學性質也更為復雜。筆者選取一個超混沌liu系統[11],其系統方程為:
(1)
其中,a=35,b=35,m=2,c=2,d=10。
首先,采用基于狀態觀測器的方法來實現liu系統自身的反同步。把系統(1)作為驅動系統并化為f(x)=Ax+Bg(x)+G的形式。驅動系統為:
(2)
其中,A、B、G、D為定常矩陣:
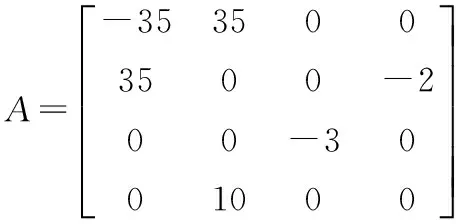

G=0
根據狀態觀測器理論,響應系統可表示為:
(3)
響應系統中的α為投影同步中的比例系數,為了使A-BD的特征值為負實部,取特征值為(-0.5,-1,-1.5,-2),運用極點配置法得到矩陣D:
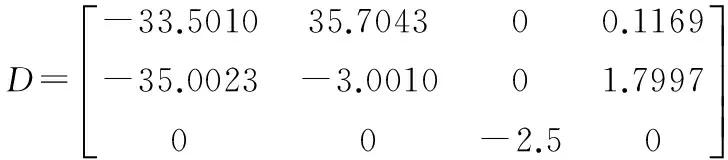
此時的響應系統為:
(4)
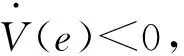
所謂反同步就是指混沌系統運動軌道的振幅大小相等、方向相反。因此,令比例系數α=-1,系統(1)的初始值為(2,20,35,-2),系統(3)的初始值為(12,30,50,40),利用Matlab進行數值仿真得到結果,此時驅動系統(1)和響應系統(3)實現了反同步,其系統的反同步曲線和反同步誤差如圖1、2所示。由圖2可知,系統的誤差e1、e2、e3、e4隨著時間的增加逐漸趨于零點,也就是驅動系統和響應系統達到了反同步。
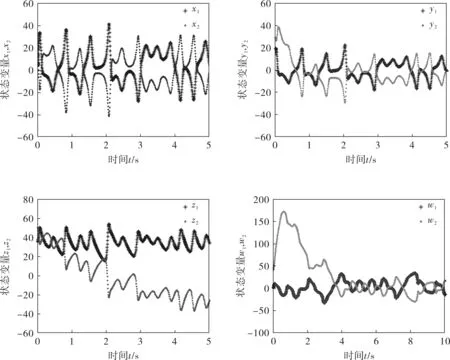
圖1 驅動-響應系統中的各狀態變量的反同步曲線
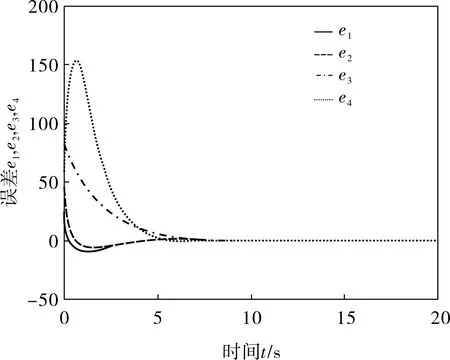
圖2 驅動-響應系統的反同步誤差曲線
2 反饋法實現反同步
同樣選取系統(1)作為驅動系統,那么,其同結構加了控制器后的響應系統為:
(5)
其實U=(u1,u2,u3,u4)T即將要設計的控制器。
將系統(1)和系統(5)相加,得到誤差動態系統為:
(6)
其中e1=x1+x2,e2=y1+y2,e3=z1+z2,e4=w1+w2,設計合適的控制器U=(u1,u2,u3,u4)T,將驅動系統(1)和響應系統(5)實現反同步。
以非線性控制理論為依據,設計控制器U為:
(7)
由式(6)、(7)可將誤差系統轉化為如下形式:
(8)
取李雅普諾夫函數為:
(9)
對式(9)取導數為:

=e1[a(e2-e1)+μ1]+e2(be1-me4+μ2)+
e3(-ce3+μ3)+e4(de2+μ4)
(10)
則可得:

令驅動系統(1)的初始值為(2,20,35,-2),響應系統(5)的初始值為(12,30,50,40),運用四階Runge-Kutta法在Matlab中進行數值仿真,從而得到系統的反同步曲線和反同步誤差曲線如圖3、4所示。
由圖2可知,當t=12.8s時,基于狀態觀測器法得到的同步誤差曲線趨于零點。由圖4可知,當t=3.0s時,反饋法得到的誤差曲線趨于零點,由此可知,對于一般系統而言,采用反饋法來實現系統的同步,雖然控制器設計復雜,但是同步速度較快。
3 結束語
根據狀態觀測器理論和李雅普諾夫定理,采用基于狀態觀測器法和反饋法分別設計了觀測器和控制器,對liu系統的反同步進行了理論論證,同時,利用Matlab對該系統進行數值模擬得到了系統的反同步曲線和反同步誤差曲線,驗證了兩種方法的可行性和有效性。基于狀態觀測器的方法具有算法簡單、計算量小的優點,與其相比,通過反饋法實現的系統同步,雖然控制器的設計較為復雜,但其同步速度相對較快,更適用于保密通信。
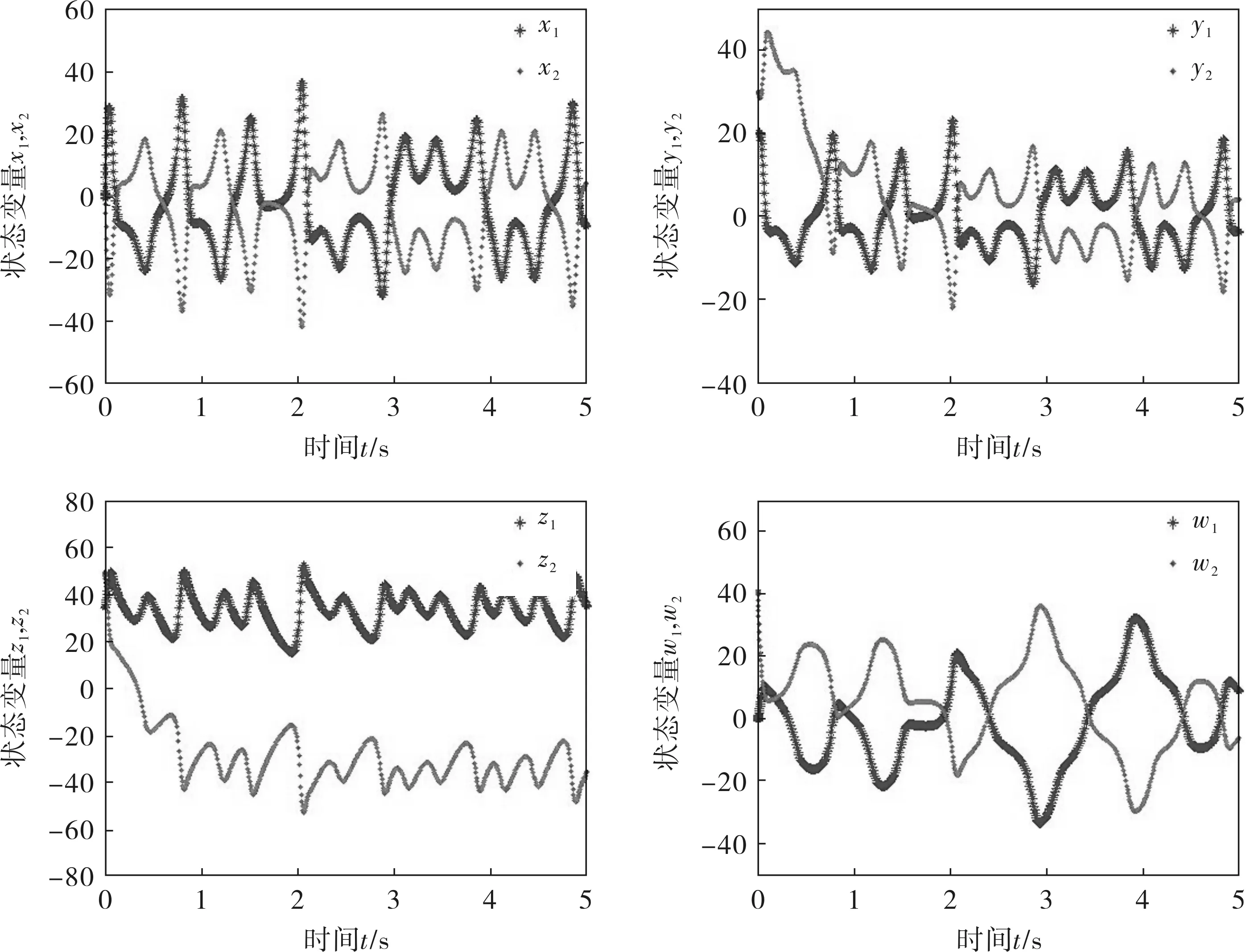
圖3 驅動-響應系統中的各狀態變量的反同步曲線
圖4 系統的反同步誤差曲線
[1] 李瑞紅,陳為勝,李爽.超混沌Lorenz系統的投影同步及其在保密通信中的應用[J].電路與系統學報,2011,16(2):41~45.
[2] 李賢麗,王升,張秀龍,等.四翼混沌吸引子系統控制[J].大慶石油學院學報,2011,35(4):117~122,14.
[3] 李賢麗,張笑宇,王升,等.Lorenz超混沌系統的周期擾動與激勵控制[J].大慶石油學院學報,2010,34(4):105~109,131.
[4] Chen J Y,Wong K W,Cheng L M,et al. A Secure Communication Scheme Based on the Phase Synchronization of Chaotic Systems[J].CHAOS,2003,13(2):508~514.
[5] 王興元.混沌系統的同步及在保密通信中的應用[M].北京:科學出版社,2012.
[6] Tam W M,Lau F C M,Tse C K.Analysis of Bit Error rates for Multiple Access CSK and DCSK Communication Systems[J]. IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications,2003,50(5):702~707.
[7] 單梁,劉光杰,李軍,等.Liu混沌系統的線性反饋和狀態觀測器同步[J].系統仿真學報,2007,19(6):1335~1338.
[8] Hu M F,Xu Z Y,Zhang R,et al.Adaptive Full State Hybrid Projective Synchronization of Chaotic Systems with the Same and Different Order[J].Physics Letters A, 2007,365(4):315~327.
[9] Zhang G, Liu Z R,Ma Z J.Generalized Synchronization of Different Dimensional Chaotic Dynamical Systems[J].Chaos,Solitons and Fractals,2007,32(2):773~779.
[10] 馬鐵東,江偉波,浮潔.基于比較系統方法的分數階混沌系統脈沖同步控制[J].物理學報,2012,61(9):39~44.
[11] 高智中,王穎.一個新超混沌系統及其線性反饋控制[J].數值計算與計算機應用,2012,33(3):167~172.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
