基于模糊PI 和自適應滑模的異步電動機DTC 控制
2015-01-13 10:07:10胡立坤盧子廣
微特電機 2015年3期
關鍵詞:實驗
李 瀛,胡立坤,盧子廣,李 卓
(廣西大學,南寧530004)
0 引 言
20 世紀80 年代中期,Takahashi 和Noguchi 提出了直接轉矩控制理論,直接轉矩系統結構簡單,具有優良的動靜態控制性能和調速效果[1-2]。
然而,直接轉矩控制有一些不足之處,電機運行時存在轉矩、磁鏈脈動大,調速范圍也受到一定的限制。通常直接轉矩控制技術(以下簡稱DTC)轉速調節部分采用PI 調節器,通過給定轉速與實際轉速的差值得到給定轉矩的值。由于電機參數在不同的運行狀態中不斷變化,而傳統的PI 調節器不能提供良好的控制要求,轉速的控制精度較差,不利于其精確調節[3]。多年來,國內外專家學者在磁鏈觀測器和PI 參數調節方面作了大量研究[4-6]。文獻[7]采用滑模控制設計轉速環和轉矩環,減小了電機的響應時間和轉矩脈動。文獻[8]采用多電平逆變器減小了磁鏈和轉矩的脈動,但使系統的硬件結構變得復雜。文獻[9]提出的速度觀測器和磁鏈觀測器,可適用于直接轉矩控制。文獻[10-11]均能有效減少轉矩脈動,但在轉矩控制回路中采用PI 控制器使轉矩響應變慢。
本文基于以上問題,提出模糊自適應PI 控制和自適應滑模磁鏈觀測器的設計,其中模糊PI 代替傳統的PI 控制,實現轉速的精確控制,而磁鏈觀測器中的自適應收斂律是通過Lyapunov 理論推導出來的,可保證觀測器的穩定性,所估計的轉矩、磁鏈具有較高的精度,脈動較小,彌補了DTC 的不足。最后,通過dSPACE DS1104、QUANSER8(Q8)搭建硬件的在回路平臺進行實驗,驗證了兩種策略所具有的優良性能。
1 異步電動機數學模型和控制系統結構
1.1 異步電動機數學模型
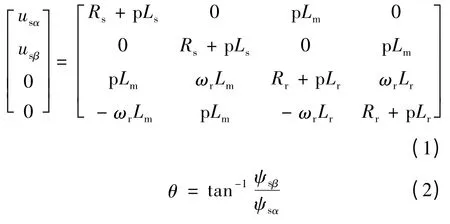
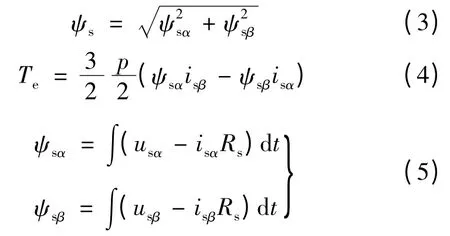
靜止坐標系下異步電動機的數學模型、定子磁鏈空間矢量角位置以及αβ 坐標系下定子磁鏈和電磁轉矩的公式如下:
1.2 改進的直接轉矩系統控制結構
為適應實際的應用系統,常采用速度觀測器DTC 技術,本文采用自適應滑模方法設計磁鏈觀測器,同樣可以估計轉速。用模糊PI 控制器代替傳統的PI 控制器來控制轉速。改進的異步電動機DTC系統框圖如圖1 所示。
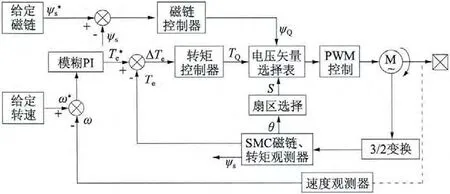
圖1 改進型DTC 系統結構框圖
2 模糊PI 控制器設計
模糊控制理論常用于優化異步電動機的性能[12]。本文所采用的模糊自適應PI 控制器是一個雙輸入、雙輸出的系統,以誤差e 和誤差的變化ec為輸入量,以ΔKp,ΔKi為輸出變量。根據模糊PI控制的基本思想,依照實際經驗建立模糊控制規則表,如表1、表2 所示。誤差e 和誤差的變化ec的論域范圍為[-12,12],ΔKp,ΔKi的論域范圍分別為[-6,6],[-0.6,0.6],e,ec,ΔKp,ΔKi的模糊集合均取{NB,NM,NS,ZO,PS,PM,PB},表示{負大,負中,負小,零,正小,正中,正大}。其中,NM,NS,ZO,PS,PM 均取三角波隸屬函數。邊界值NB,PB 取梯形波隸屬函數。
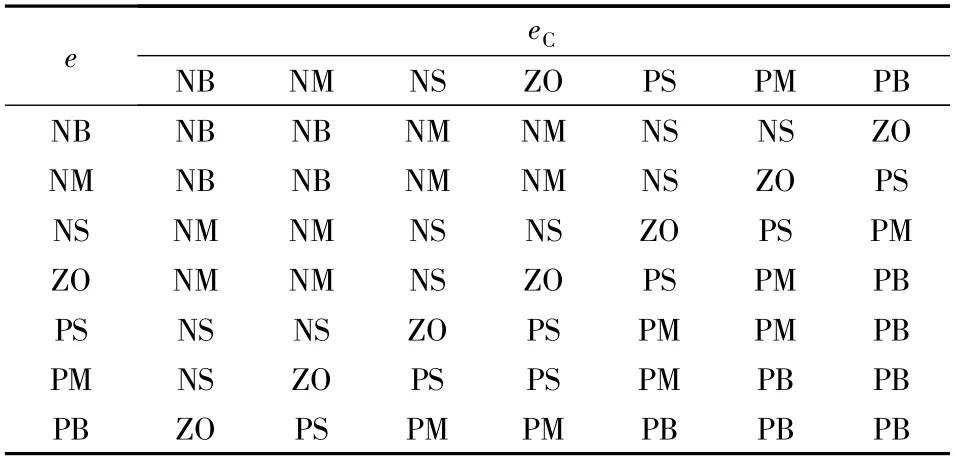
表1 ΔKp 的模糊控制表
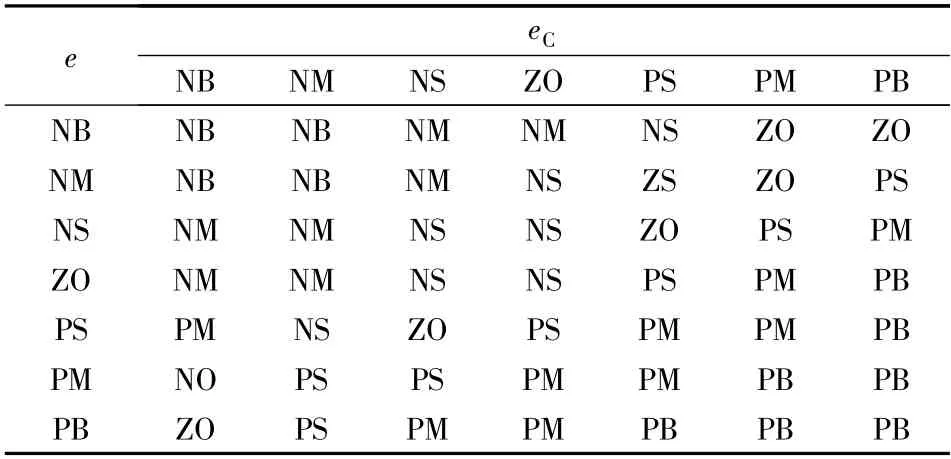
表2 ΔKi 的模糊控制表
3 磁鏈觀測器設計
將αβ 坐標系下異步電動機定子電流和定子磁鏈寫成狀態方程:

建立觀測器模型:

用式(7)減去式(6)得:




由式(10)得:

將式(10)代入式(11)消去S 得:

選取李雅普諾夫函數為:

由于轉速ωr變化慢,可將其近似為常數,Δωr=0,則V 的導數:

式(13)變為:

將式(11)和式(12)代入(15)中得:

為了滿足李雅普諾夫穩定條件,使pV <0,可令z1<0 并且z2=0。故,為保證z1<0,可使:

將K 寫成KT=cI+dJ,代入式(18)得:

改寫:
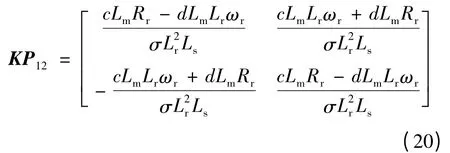
令W= [wI-KP12],得KP12的特征根:
令行列式為零,得:
即:
則特征根為:

因為w >0,特征根非正,磁鏈觀測器系統是穩定的。而當z2=0 時,有:
這樣,pV <0,將式(18)代入式(26),得:
因此,通過上式估算磁鏈,可替代式(5)傳統磁鏈計算法。新型磁鏈觀測器也可估計轉速,并能根據觀測的磁鏈值計算電機轉矩值。
4 仿真結果
依據DTC 原理、異步電動機模型和控制設計方法,用MATLAB/Simulink 分別搭建傳統和新型的DTC 仿真模型。仿真電機參數如表3 所示。

表3 仿真電動機主要參數
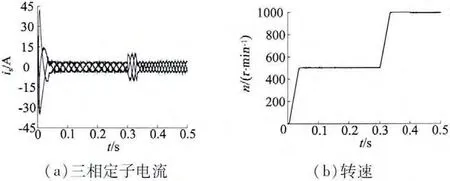
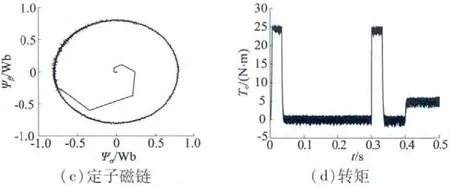
圖2 傳統異步電動機直接轉矩控制仿真結果
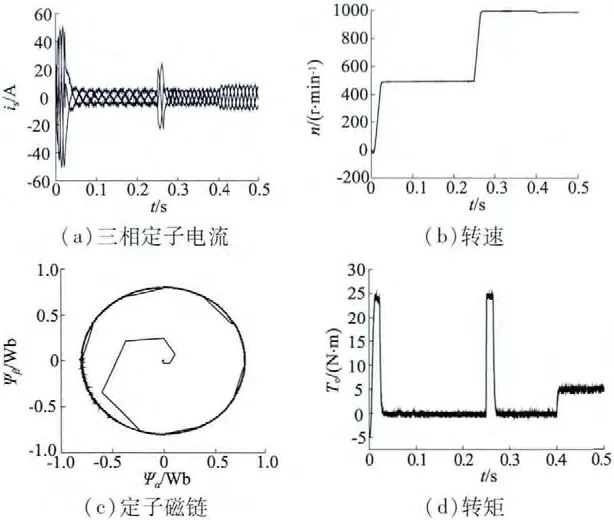
圖3 新型異步電動機DTC 仿真結果
由圖2、圖3 可知,兩種方法中電機轉速均能跟蹤給定轉速,當給定轉速發生改變時,電機轉速迅速達到1 000 r/min,定子磁鏈在整個變化過程中沒有發生改變,一直為0.8 Wb,轉矩也呈矩形。但是新型直接轉矩控制方法調節速度快,轉矩、磁鏈脈動小。
5 實驗結果
以上仿真結果證明了改進方法的可行性和有效性,將其應用到實際系統中進行實驗研究。本實驗采用一套4 kW 三相異步電動機、QUANSER8(Q8)和dSPACE DS1104 搭建調速實驗平臺,dSPACE DS1104 實時仿真系統是一套基于MATLAB/Simulink 的控制系統開發及半實物仿真的軟硬件工作平臺,可作為控制器進行實時計算、A/D 采樣、PWM脈沖輸出和數據保存。采樣頻率50 kHz,開關頻率5 kHz,死區時間5 μs。異步電動機主要參數如表4所示。
實驗中給定轉速從200 r/min 上升到600 r/min,模糊PI 控制器和傳統PI 控制器對比結果如圖4 所示。由圖4 可看出,模糊自適應PI 大約經過150 ms轉速就達到穩定狀態,并且無超調和機械脈動,而傳統的PI 要經過250 ms 轉速才穩定,大約有5.25%的超調。

表4 異步電動機主要參數
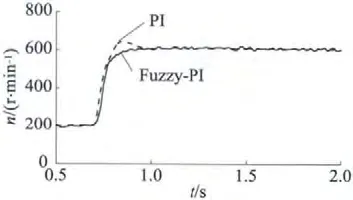
圖4 模糊PI 和傳統PI 的對比
圖5 為自適應滑模磁鏈觀測器所觀測的磁鏈、轉矩與傳統磁鏈、轉矩對比實驗。給定磁鏈為0.75 Wb,電機先空載運行,在1.0 s 時帶載運行。圖5(a)、(b)為傳統方法中的轉矩、磁鏈波形圖;圖5(c)、(d)為采用新型磁鏈觀測器的轉矩、磁鏈波形圖。
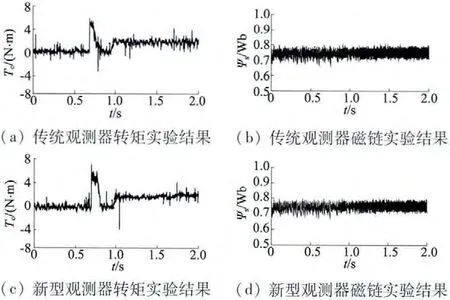
圖5 兩種觀測器對比實驗結果
從圖5 可以明顯看出,傳統觀測器所觀測的轉矩和磁鏈脈動很大,而采用自適應滑模設計的觀測器,所估計的轉矩和磁鏈脈動明顯減小,說明觀測器具有可應用性且控制性能優良。
將模糊PI 控制器和自適應滑模磁鏈觀測器兩種控制策略應用到異步電動機直接轉矩控制調速實驗中。給定定子磁鏈ψ*s =0.6 Wb,給定轉速從300 r/min 上升到700 r/min。實驗結果如圖6 所示,圖6(a)為轉子速度,在0.7 s 時,轉速發生從300 r/min發生跳變,大約經過0.16 s 轉速上升到700 r/min,轉速略有波動,變動范圍很小。圖6(b)為電機的電磁轉矩,可以看出當轉速發生變化時,轉矩迅速響應,瞬間達到大約5.8 N·m,而后快速下降。圖6(c)為定子電流變化,定子電流在高速時幅值比低速時小,定子電流變化到穩定的時間和轉速上升所用時間幾乎一致。圖6(d)為定子磁鏈,在轉速變化過程中,其值一直為給定磁鏈值,控制良好且波動很小。
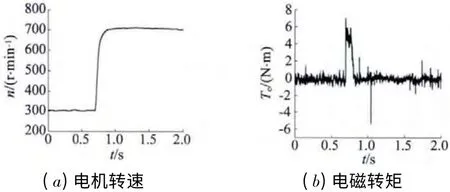
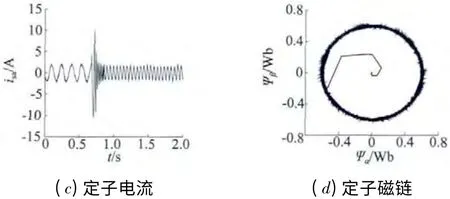
圖6 新型異步電動機直接轉矩控制實驗結果
6 結 語
本文的模糊PI 控制器是在傳統PI 的基礎上加入模糊控制算法,可自動調節PI 參數,轉速調節時間短且無超調,實現其精確調節。根據自適應滑模基本原理,通過Lyapunov 理論推導自適應收斂律,設計了磁鏈觀測器,所估計的轉矩和磁鏈精度較高,脈動明顯較少,兩種控制策略提高了整個電機調速系統的控制精度,系統具有良好的控制性能。
[1] CHE Changjin,QU Yongyin.Research on drive technology and control strategy of electric vehicle based on SVPWMDTC[C]//2011 International Conference on Mechatronic Science,Electric Engineering and Computer. IEEE Conference Publications,2011:44-49.
[2] SERGAKI E S,MOUSTAIZIS S D.Efficiency optimization of a direct torque controlled induction motor used in hybrid electric vehicles[C]//IEEE Conference Publications,2011:398-403.
[3] 袁登科,徐國卿,胡波,等.直接轉矩控制交流調速系統轉速調節器的設計研究[J].機電一體化,2008(10):47-50.
[4] FINCH J W,GIAOURIS D. Controlled AC electrical drives[J].IEEE Trans.on Ind.Electron,2008,55(2):481-491.
[5] 吳志飛,張興華,孫振興,等.基于自適應滑模觀測器的感應電動機直接轉矩控制[J].微特電機,2013,41(10):64-69.
[6] 李春杰,李旭春.一種改進的直接轉矩控制系統定子磁鏈觀測方法[J].電機與控制應用,2006,33(6):32-35.
[7] 傅洪,陳全世,田光宇.基于滑模的直接轉矩控制車用驅動電機的研究[J].汽車安全與節能學報,2010,1(1):59-66.
[8] 駱光照,李斐,楊南方,等.三電平逆變器供電永磁同步電機直接轉矩控制研究[J].西北工業大學學報,2012,30(1):22-26.
[9] 廖永衡,馮曉云,王珍.基于定子磁鏈滑模觀測器的異步電機空間矢量調制直接轉矩控制[J].中國電機工程學報,2012,32(18):88-97.
[10] TANG Lixin,ZHONG Limin,RAHMAN M F,et al. A novel direct torque controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency[J]. IEEE Transactions on Power Electronics,2004,19(2):346-354.
[11] 劉軍,楚小剛,白華煜. 基于參考磁鏈電壓空間矢量調制策略的永磁同步電機直接轉矩控制研究[J]. 電工技術學報,2005,20(6):11-15.
[12] AZCUE P J L,RUPPERT E. Three-phase induction motor DTC-SVM scheme with self-tuning PI-type fuzzy controller[C]//2010 Seventh International Conference on Fuzzy Systems and Knowledge Discovery.IEEE Conference Publications,2010:757-762.
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55