新型物料輸送器的設計與實驗研究
2015-01-13 05:40:48艾炳任栗守才田曉超
化工機械 2015年5期
李 佳 艾炳任 栗守才 田曉超
(1. 中國石油吉林石化公司化肥廠;2. 吉林大學機械科學與工程學院)
隨著科技的發展,振動輸送器在自動化生產線上逐漸代替了人工勞動力,它具有整列特性好、定向輸送能力強及工作效率高等優點[1]。傳統的輸送器(也叫送料器)都是以機械式或電磁式驅動為主,然而它們具有噪音大、受電磁干擾、結構復雜及耗能高等缺點[2~4]。在現代工業的發展中,產品越來越趨向于輕、薄、小和低碳環保,整列性和輸送精度要求越來越高,輸送速度越來越快,工作環境也日趨改善,這就對輸送器的體積、噪音、輸送平穩性及節能等方面提出更高的要求,而電磁式振動輸送器已無法滿足這些生產要求。壓電式振動輸送器是近些年發展起來的一種新型輸送器,相比傳統輸送器它具有振幅小、精度高、穩定性好及耗能低等優點,在食品、醫療、化工及電子等自動化生產領域將會得到廣泛應用。早在1977年,日本首次成功研制出了以壓電陶瓷作為驅動源的壓電振動送料器[5],之后韓國Inha大學敏捷制造與系統實驗室制造了新型壓電送料器,并對該送料器進行了有限元分析和實驗分析[6],臺灣也對直線式壓電送料器進行了建模分析[7],吉林大學、大連理工大學、大連交通大學及天津大學等也對壓電振動輸送器進行了相關方面的研究[8~11]。
筆者設計了一種新型物料振動輸送器,以雙晶片壓電振子為驅動源,在驅動源兩端配上一種合適的質量塊,使系統在適宜的頻率下工作,且物料在直線軌道上均勻、平穩的輸送。
1 結構與工作原理
筆者所設計的新型物料振動輸送器結構示意圖如圖1所示,其驅動源為雙晶片壓電振子(壓電陶瓷與金屬基板復合在一起),一端與底座相連,一端與支撐彈簧下部相連,支撐彈簧的上端與頂盤相連,頂盤上面固定直線料道,驅動源兩端配有一定質量的配重塊,支撐彈簧、壓電振子與頂盤和底座保持一定的安裝角度,底部裝有橡膠底腳,起減振作用。
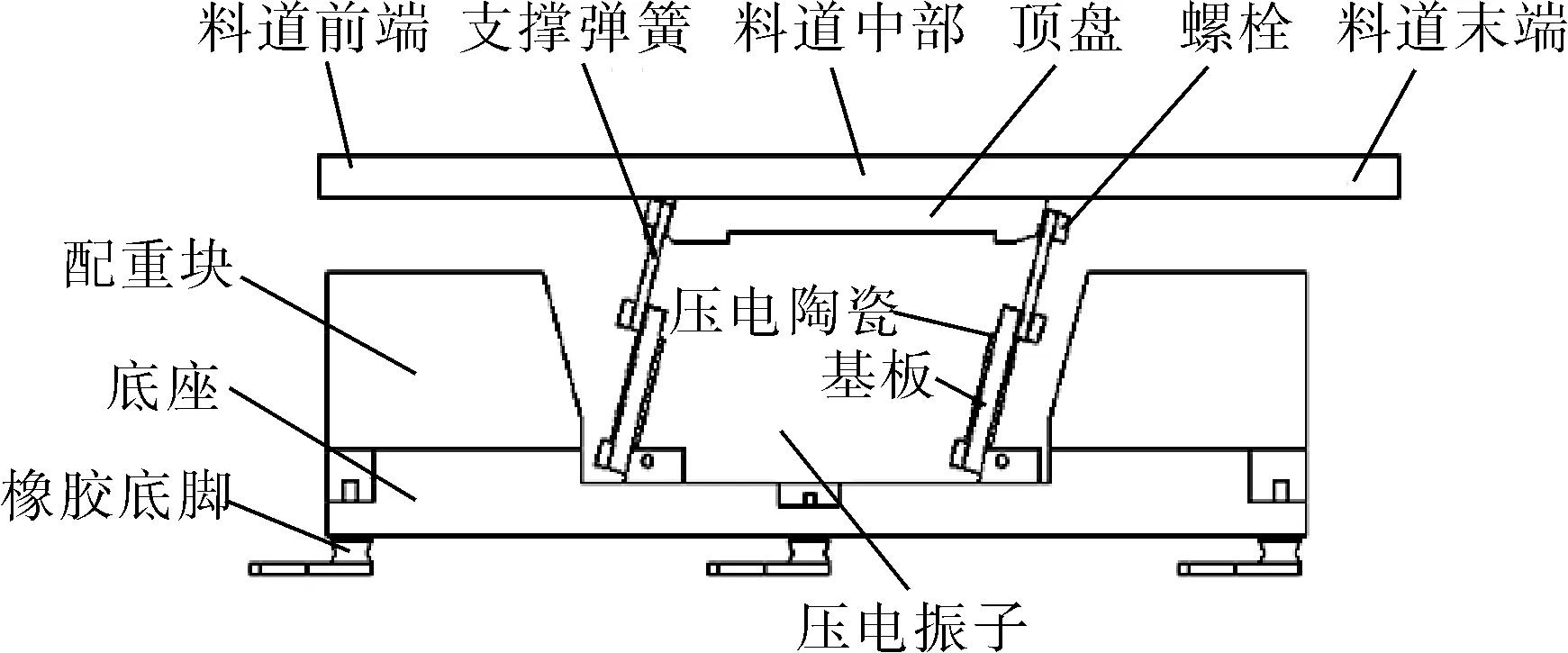
圖1 新型物料振動輸送器結構示意圖
物料運動過程如圖2所示,在矩形雙晶片壓電振子上施加正弦交流電壓,使之發生彎曲變形。由于壓電振子存在一定的安裝角度φ,因此產生水平和豎直方向的復合振動。當壓電振子向右彎曲運動時,帶動支撐彈簧片發生彎曲變形,儲存彈性勢能;當壓電振子向左彎曲時,上下支撐彈簧釋放彈性勢能,迫使彈簧片迅速改變彎曲方向,并向左上方運動,經過支撐彈簧振動位移放大作用,即支撐彈簧彎曲角度β大于壓電振子彎曲角度α,超越原來的靜平衡位置達到某一上限,如此往復循環,運動過程為從右向左(圖2),物料在很小的空間內滑移運動,經過特制的滑槽形狀,使物料按著要求的軌跡運動。
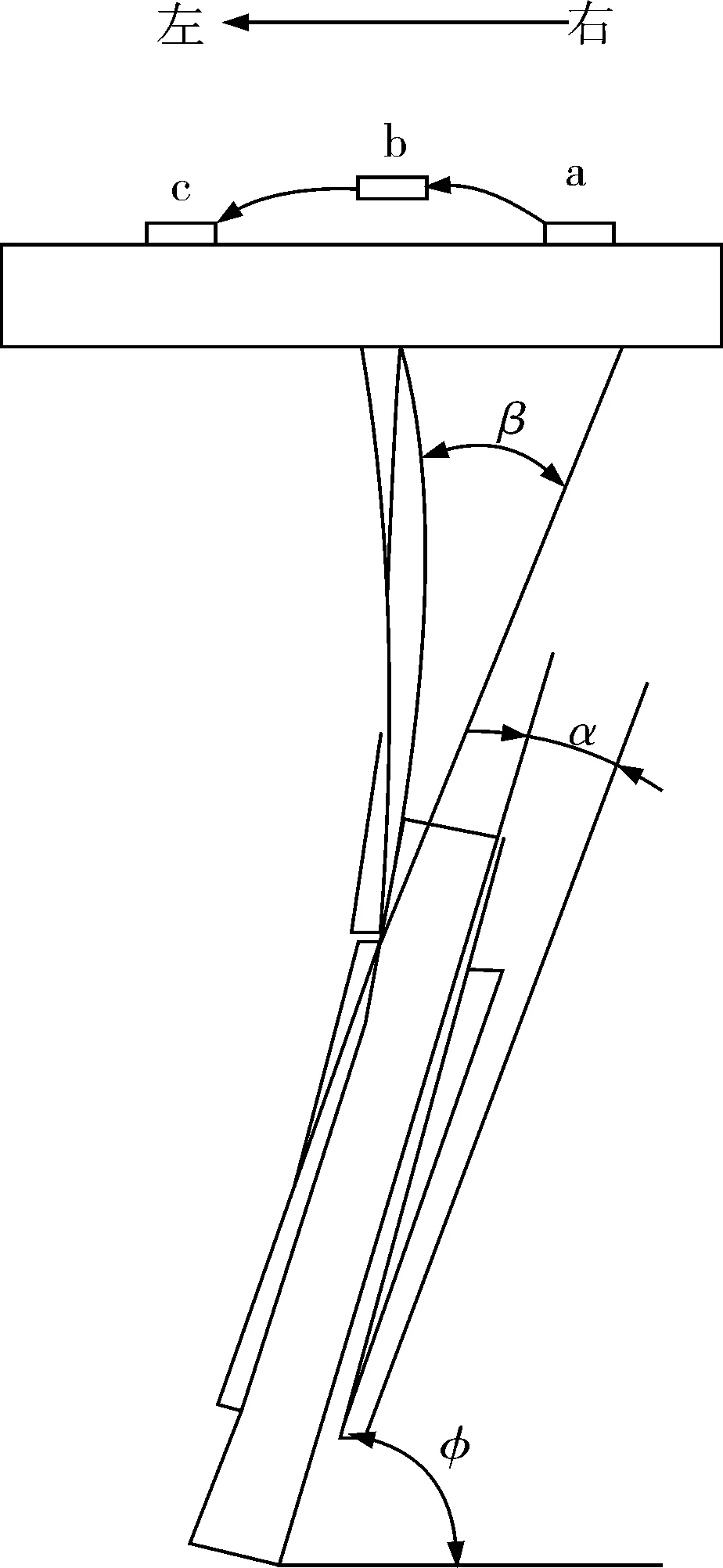
圖2 物料運動過程
2 動力學方程的建立和仿真分析
2.1動力學方程的建立
物料輸送器的簡化力學模型如圖3所示。m1為頂盤和料道質量;m2為底座和配重塊的質量;k0為支撐彈簧片的剛度;k1為壓電振子的剛度;k2為橡膠底腳的剛度,c1、c2為系統的阻尼系數,為驅動源提供豎直方向的驅動力;x0、x1、x2為壓電振子;m1和m2的振動為位移。令F(t)=k0x0cosωt為壓電振子提供的激勵力。
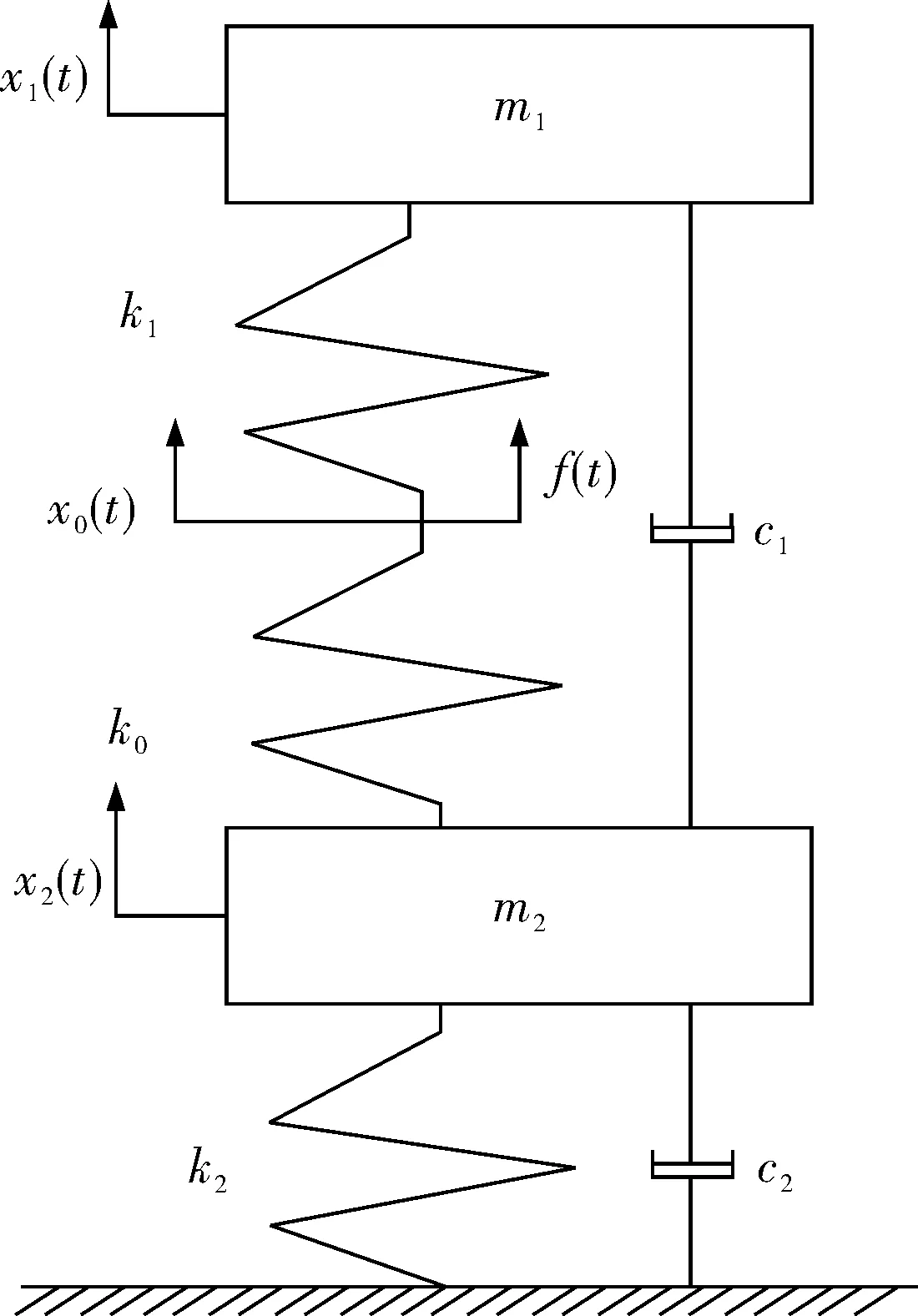
圖3 簡化力學模型
該系統可看成雙自由度受迫振動簡諧激勵,為凸顯主要影響因素,先將系統阻尼忽略,運動微分方程為:
(1)
將式(1)轉化為:
(2)
由式(2)可得系統的固有頻率方程:
(3)
由于k2遠小于k0和k1,因此取k2≈0,則得到系統的固有頻率為:

(4)
可將雙自由度振動系統轉化為單自由度有阻尼強迫振動系統,模型圖如圖4所示。
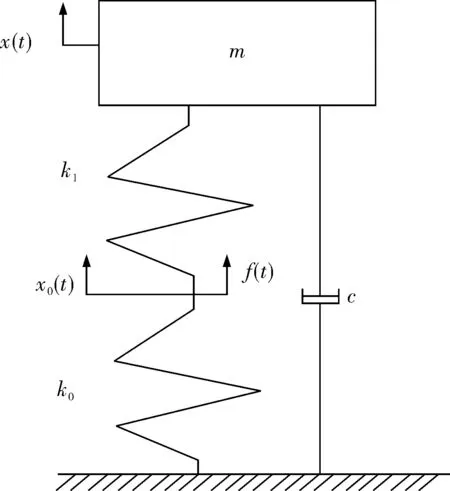
圖4 直線振動輸送器簡化模型
簡化后的等效質量為:
(5)
則單自由度有阻尼強迫振動系統微分方程為:
(6)
將式(5)變換為:
(7)
變換得到:
(8)

式中A——激勵振幅;
ξ——粘性阻尼因子;
ωn——固有頻率。
由式(7)得到系統的穩態響應為:
(9)
令:
(10)
穩態響應的幅值X與激勵振幅A的比值λ為系統位移的放大倍數,即:

(11)
(12)
2.2系統模態仿真分析
利用Ansys軟件對系統振動進行模態分析,得到系統的四階振動模態,如圖5所示。
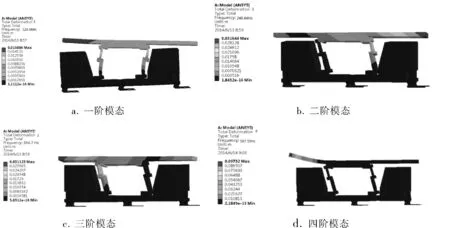
圖5 系統振動模態
從四階模態上可看出,帶有配重塊的底座振動位移最小,一階振型比較符合實際工作情況,產生斜向上振動,其中振動位移最大的區域是由懸臂原因引起的,二階和三階振型壓電振子沿寬度方向發生扭曲,產生側向振動,四階諧振頻率頻率過高只有一端有微小振動。輸送器料道要求是有適當的振動位移輸出,且系統應按要求的方向振動,所以選用其一階振型作為其工作模式。
3 實驗測試
3.1測量裝置原理和樣機尺寸
實驗測試原理圖如圖6所示,主要包括數字壓電調頻控制器(型號SDVC)、激光測微儀(型號LC- 2400A)、傅里葉分析儀(型號CFI200)和其他測量工具。
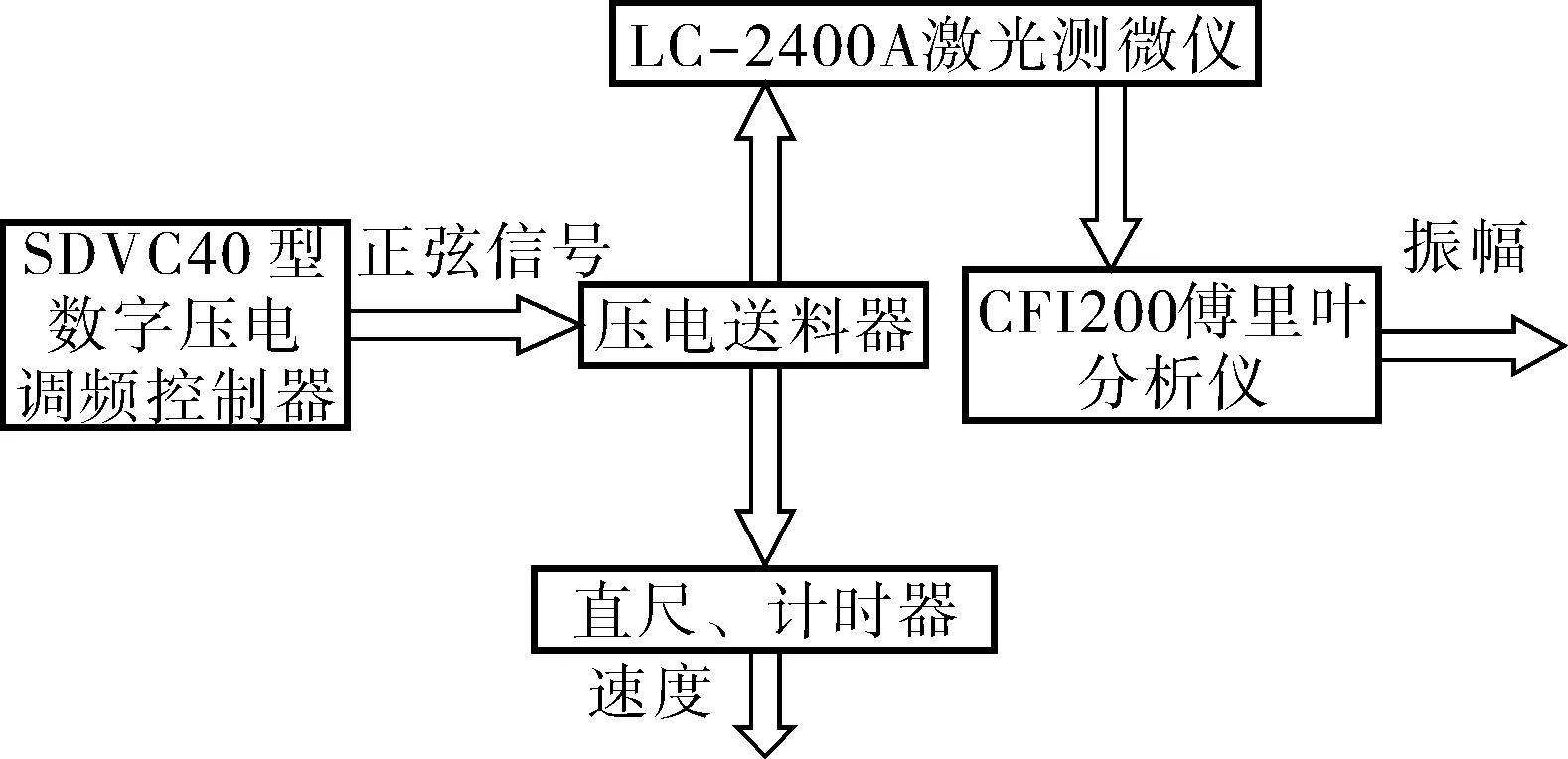
圖6 實驗測試原理
制造系統的樣機尺寸和各部件所用材料為:料道300mm×50mm×8mm,材料為鋁合金;頂盤160mm×50mm×8mm,材料為鋁合金;支撐彈簧50mm×50mm×2.5mm,材料為65Mn;基板60mm×40mm×6mm,材料為65Mn;壓電陶瓷40mm×30mm×1.2mm,配重塊選用底部帶滑槽可移動式結構;底座240mm×72mm×20mm,材料為45#鋼。
3.2頻率-位移關系
調節信號發生器,為了防止電壓過高而擊穿壓電陶瓷,將電壓值設為180V,為了測試準確,在料道上取前端、中部和末端3個點分別測試,改變驅動頻率并測量料道的振動位移,得到幅頻特性曲線,如圖7所示。
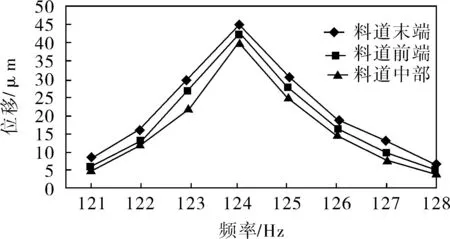
圖7 頻率-位移特性曲線
從圖7可看出,取得3個測試點振動位移在124Hz附近時料道的振動位移達到最大,說明系統的共振頻率為124Hz,料道前端、中部、末端位移分別為43、41、45μm。產生不同振幅的原因是料道前端和末端是懸臂出來的,產生微小彎曲振動。這也說明輸送料道不宜過長,否則會產生強烈的懸臂梁彎曲振動,導致回料或停滯現象。
3.3輸送速度測試
將長×寬×高為3mm×2mm×2mm的金屬塊放入料道的末端,調節信號發生器電壓設定為180V,改變信號發生器的頻率,讓金屬塊從料道末端移動到前端,每增加0.5Hz測量一次,得到頻率-輸送速度的變化關系曲線如圖8所示。
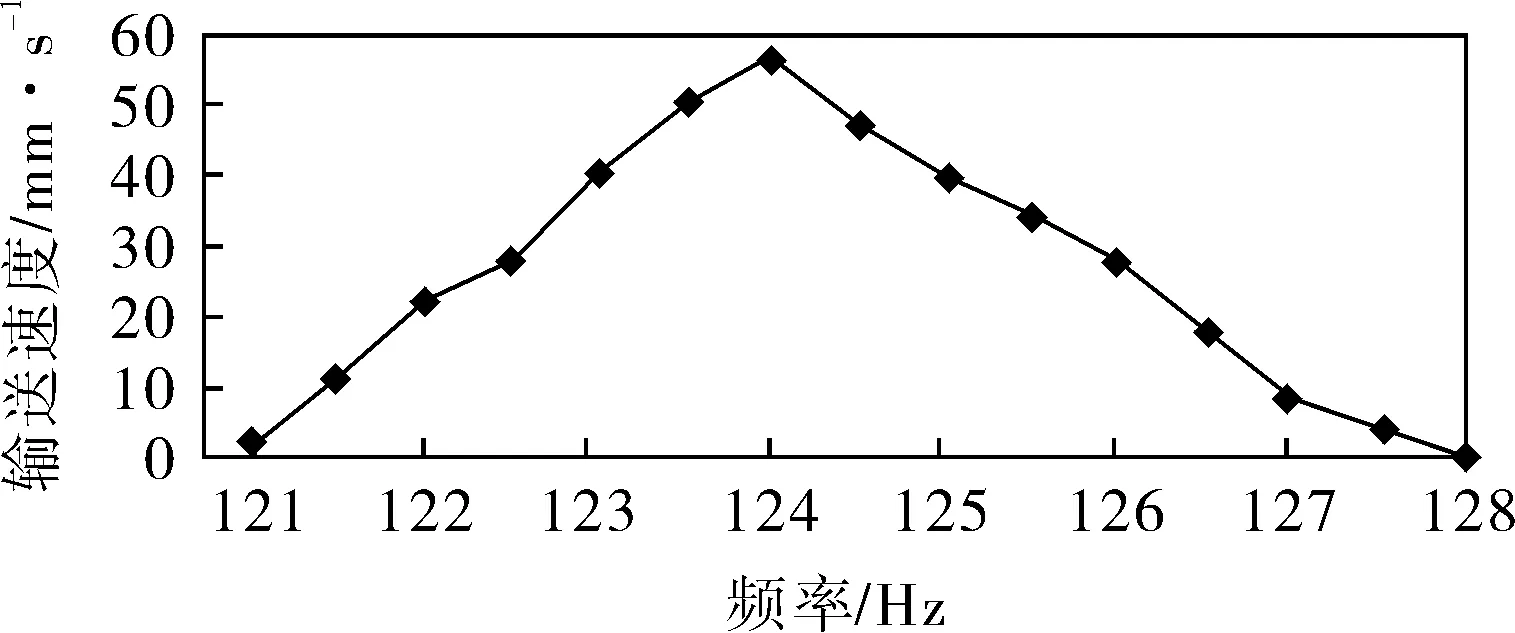
圖8 頻率-輸送速度特性曲線
從圖8中可看出,頻率在121~128Hz時輸送器具有輸送物料能力,在小于121Hz和大于128Hz的頻率范圍內輸送速度均為0。在共振頻率下輸送速度最快,達到58mm/s。
調節信號發生器的頻率為系統共振頻率124Hz,改變驅動電壓,每隔25V測量一次,得到電壓-輸送速度的變化關系曲線,如圖9所示。
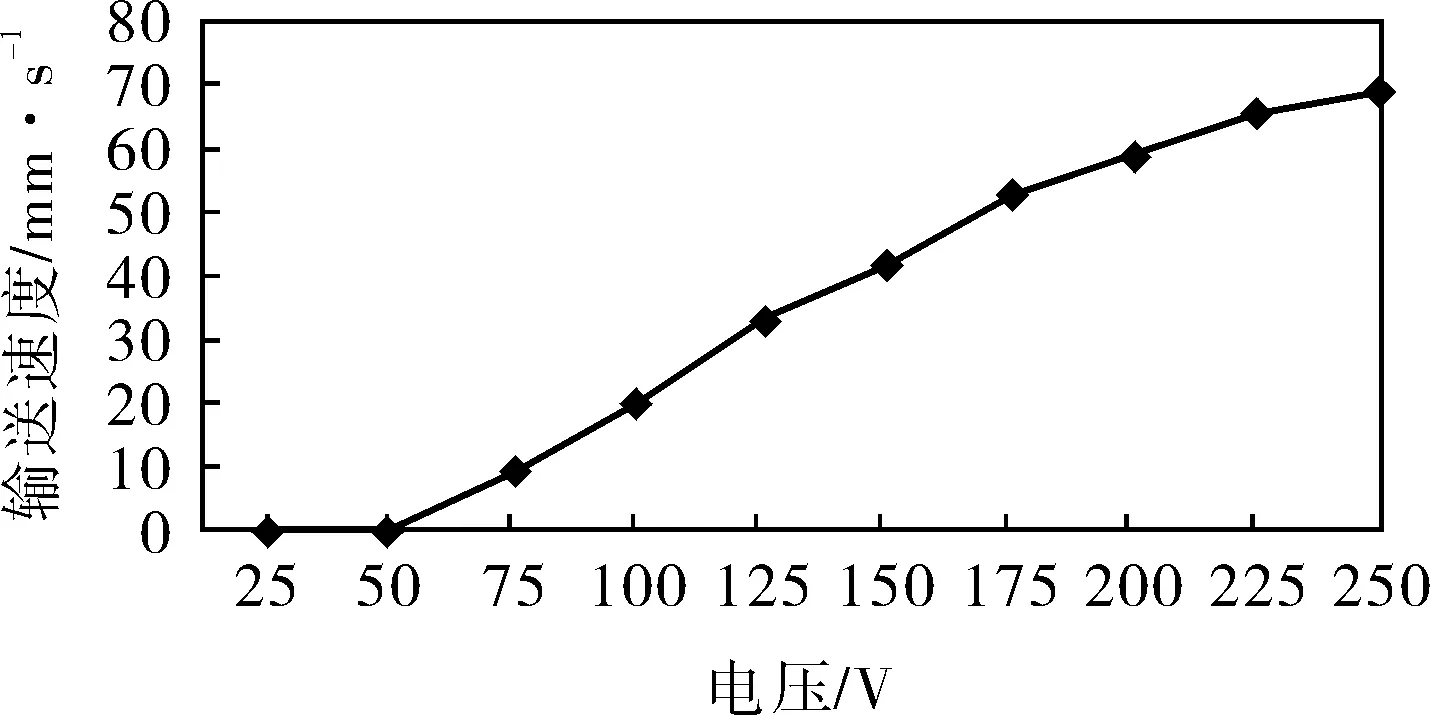
圖9 電壓-輸送速度特性曲線
從圖9中可看出,電壓在50V以下輸送速度為0,大于50V時,隨著電壓的增加,輸送速度逐漸增大,基本呈線性關系。
3.4對比實驗
與同型號的電磁式振動輸送器進行對比實驗,分別調節信號發生器,使其工作在共振條件下,回路中的電壓為180V,測得相關參數見表1。

表1 輸送器性能對比
由表1可以看出,在電壓相同時,共振條件下研制的樣機其電流僅為電磁式的21.71%,輸送速度是電磁式的1.65倍,振幅為電磁式的36.6%,噪音比電磁式低41dB。電磁式輸送器在輸送過程中出現明顯的跳躍、顛簸現象,輸送性能較差。
4 結論
4.1為了實現對現代工業輕、薄、小產品的平穩的輸送,研制了一種直線式物料輸送器,對系統的模型進行了分析,推導出了系統位移放大倍數表達式,以及對其進行了系統振型模態分析。
4.2對物料輸送器進行了實驗研究,壓電振動輸送器有較小位移輸出,僅在40~45μm之間,工作頻率范圍為121~128Hz之間,具有輸送物料的能力,在共振條件下輸送速度最快,達58mm/s。
4.3與同型號的電磁式振動輸送器相比,在共振條件下研制的樣機的電流僅為電磁式的21.71%,輸送速度是電磁式的1.65倍,振幅為電磁式的36.6%,噪音降低了41dB。
[1] 杰弗里·布思羅伊德著,熊永家譯.裝配自動化與產品設計[M].北京:機械工業出版社,2009:14~23.
[2] 羅陳,劉協舫.斗式電磁振動供料器的設計[J].武漢食品工業學院學報,1998,(2):10~16.
[3] 田忠靜,吳文福.壓電振動送料裝置的研究現狀及其應用[J].機械設計與制造,2011,(11):54~56.
[4] Maul G P,Thomas M B.A System Model and Simulation of the Vibratory Bowl Feeder[J].Journal of Manufacturing Systems,1997,16(5):309~314.
[5] 特殊陶業株式會社.壓電振動搬送裝置[P].日本:52- 61087,1977- 05- 04.
[6] Choi S B,Lee D H.Modal Analysis and Control of a Bowl Parts Feeder Activated by Piezoelectric Actuators[J]. Journal of Sound and Vibration,2004,275(1/2):452~458.
[7] Paul C,Chao P,Chien Y S.Dynamic Modeling and Experimental Verification of a Piezoelectric Part Feeder in a Structure with Parallel Bimorph Beams[J].Ultrasonics,2007,46(3):205~218.
[8] 姜斌,劉曉論,楊志剛,等.垂直驅動型超聲波送料器的研究[J].光學精密工程,2008,16(6):1082~1086.
[9] 焦其偉,崔文會,孫寶元,等.壓電式振動給料器的研制[J].傳感器技術,2001,20(4):23~26.
[10] 關志華.壓電式振動給料機的研制[D].天津:天津大學,1999.
[11] 曲紹鵬.壓電振動給料器的結構優化設計[D].大連:大連交通大學,2010.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40