惠斯頓杠桿機構在鋼管行業中的應用
2015-01-22 06:06:16吳鵬飛李敬波竇茂科
焊管 2015年7期
吳鵬飛,李敬波,竇茂科
(寶雞石油鋼管有限責任公司 ,陜西 寶雞 721008)
鋼管橫移裝置是在惠斯頓杠桿基礎上設計的,由多列并行機構所組成,它的作用是將管坯快速橫移至輸送輥道或將輸送輥道上的管坯快速移送至臺架,具有移送效率高、無沖擊、低噪聲等優點。在轉動過程中,其上的托架開口始終向上,保持平動,這樣就避免了用翻料器翻鋼造成的管坯表面劃傷,保證鋼管的表面質量。而旋轉熱鋸是在惠斯頓杠桿基礎上設計的周轉輪系,是將由電機驅動的鋸片裝在旋臂上,作與管坯運動速度相等的圓周運動。鋸片公轉的絕對角速度為零,合成運動為平動,與往復式熱鋸相比,具有高效、快速、穩定等優點。因此,這種機構在鋼管生產線上的得到了大力推廣和應用。
1 在鋼管橫移裝置中的應用
1.1 冷床下料移送裝置
寶雞石油鋼管公司專用管公司采用的冷床下料移送裝置布置于冷床臺架和輸送輥道之間,主要由電子控制部分、傳動部分、聯軸器、傳動軸和回轉臂等組成。回轉臂固定在傳動軸上,由變頻電機經減速機驅動傳動軸和回轉臂轉動。電子凸輪控制器根據設備使用的工況要求,實現對轉臂速度的變頻控制。可實現平穩接鋼、快速移鋼、平穩放鋼和快速返回等循環過程。其平面布置圖如圖1所示。此裝置托架是以平動方式運行的一種機構。它主要由托架、鏈傳動機構、轉臂、調節裝置和配重共同構成,其結構簡圖如圖2所示。

圖1 冷床下料移送裝置平面布置圖
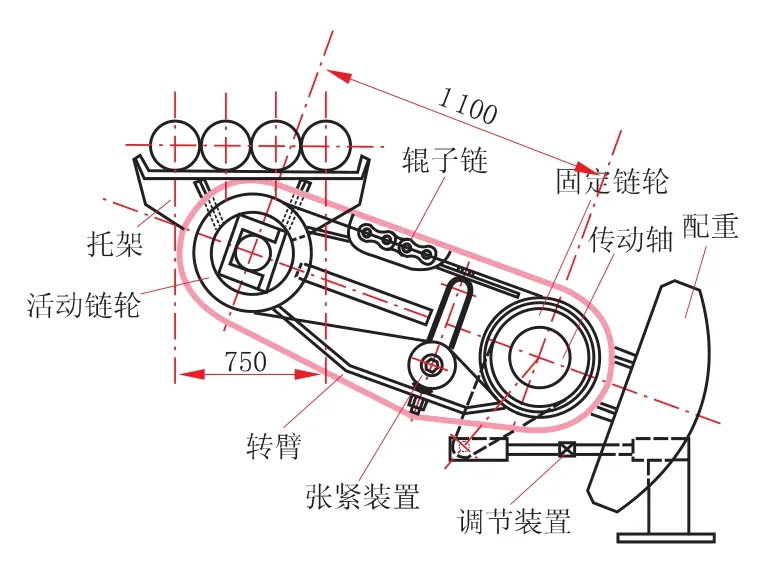
圖2 冷床下料移送裝置結構簡圖
托架用來裝載鋼管,它和鋼管一起作平動。轉臂隨傳動軸轉動,向托架傳遞轉矩,并裝有鏈傳動機構。鏈傳動機構可以保證托架和鋼管保持平動而不隨轉臂轉動,它由活動鏈輪,固定鏈輪,張緊裝置組成。調節裝置與固定鏈輪鉸接,作用主要是微調托架,保證托架垂直向上避免傾斜。配重可以使空載的轉臂保持平衡,并且在負載時抵消部分轉矩。
轉臂轉動時,鋼管被托架平穩地托起并水平移動,固定鏈輪空套在傳動軸上,與調節裝置鉸接固定,并與活動鏈輪的相對傳動比i=1,使得活動鏈輪的絕對角速度為零,這樣就保證了在轉臂轉動過程中,與活動鏈輪固定聯結的托架始終保持豎直位置。活動鏈輪通過鏈條與固定鏈輪相聯接,由固定在轉臂上的鏈條張緊裝置使鏈條張緊。轉臂托起鋼管轉過一定角度后,再把鋼管放在輸送輥道上,這樣就完成了一個工作行程。
1.2 管坯運動過程分析
托架和管坯作平動,其上各點的軌跡形狀相同,在每一瞬時,各點的速度相同,加速度也相同,因此,求剛體的運動就轉化為求管坯中心點A的運動。其機構運動簡圖如圖3所示。

圖3 惠斯頓杠桿機構運動簡圖
設鋼管中心A點的坐標為(XA,YA),速度為v,傳動軸角速度為ω,取XO1Y為直角坐標系,則A點的運動方程為

由(1)2+(2)2得軌跡方程為

式中:H=h+r,r為管坯的半徑。
由此可見,點A的軌跡是以O3(0,H)為中心,R為半徑的圓,其運動軌跡如圖中雙點劃線所示。
速度在各坐標軸上的投影等于動點的各對應坐標對時間的一階導數,則:

式中: ω=dβ/dt。
由式(4)和式(5)可知,A點的速度與回轉臂半徑和傳動軸轉速均成正比。當β=0°時,此時vx=0, vy=ωR;當 β=180°, 此時 vx=0 , vy=-ωR。 在托架托起鋼管和放下鋼管時,托架和管坯之間以及管坯和輥道之間都會產生碰撞,由于碰撞時間極短,根據動量定理,將出現很大的碰撞力,影響管坯的表面質量。因此,就要求vy越小越好。也就是接鋼和放鋼時傳動軸的轉速越小越好。但又受到生產效率的限制,ω不能太小,為了解決這個矛盾,這就要求傳動軸在接鋼和放鋼時低速運行,而在其它時間內要求快速運動。為此,根據工藝要求制定速度圖如圖4所示。

圖4 惠斯頓杠桿速度圖
由圖4可見,在冷床下料時,電機要經歷拖動運行和制動運行兩個階段。根據設備的運行工況可分為起動過程、接鋼過程、負載運行過程、放鋼過程、空載運行過程以及制動過程六個階段,可以用電氣控制很方便的實現這些要求。
1.3 剛體運動的合成
將動系固結在轉臂上,設活動鏈輪的相對角速度ω1r和固定鏈輪的相對角速度ω2r分別繞O1,O2做定軸轉動,牽連角速度ω,兩輪的絕對角速度ω1,ω2,其方向如圖5所示。則
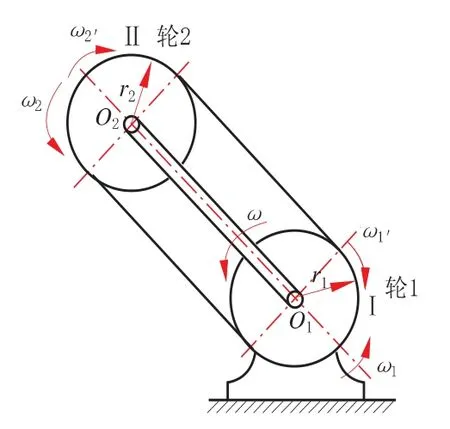
圖5 活動鉸鏈速度分析圖

式中: ω1=0, ω1r/ω2r=r2/r1=1, r1和 r2分別為固定鏈輪和活動鏈輪的半徑。
由上式可解出ω2=0,α2=0
即輪2(活動鏈輪)做平動,因而可保證托架開口始終處于豎直方向。
2 在超聲波探傷取管器中的應用
寶雞住金石油鋼管有限公司生產線中的取管器布置在超聲波探傷設備與精整臺架之間,主要作用是將精整臺架上的管坯逐根快速橫向移送至超聲波前輸送輥道,然后將鋼管焊縫旋轉至朝上,以便進行超聲波探傷。其結構如圖6所示。
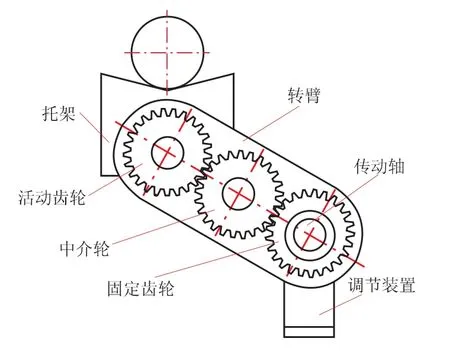
圖6 超聲波探傷取管器結構簡圖
此裝置托架也是一種以平動方式運行的機構,其組成、工作原理和運動分析與上述冷床下料移送裝置基本相同,區別在于后者是采用齒輪傳動的行星輪系,無張緊輪裝置,結構較前者緊湊,外廓尺寸較小,中間齒輪齒數的多少并不影響傳動比的大小,而僅起著中間過渡和改變從動輪轉向的作用。
此裝置為周轉輪系中的行星輪系,固定齒輪1為太陽輪,齒輪2為中介輪,活動齒輪3為行星輪,轉臂為行星架H,這樣就構成了具有固定輪的K-H型行星輪系。已知Z1=Z3,轉臂角速度為ωH, 則

式中固定鏈輪1固定ω1=0。

因轉臂角速度ωH≠0,所以,ω3=0。

這說明了行星輪 (活動齒輪)不轉動,而與固定于其上的托架一起只做平動。其次,行星輪具有自轉,自轉轉速與行星架轉速大小相等,方向相反。這與冷床下料移送裝置的結果完全吻合。
3 在旋轉熱鋸中的應用
熱鋸有往復式和旋轉式兩種。前者是載鋸臺車與管坯以相同的速度移動,在移動中進行切斷的一種鋸。切斷完成后,臺車后退到原位,以待下次切斷。而旋轉式熱鋸是將鋸片裝在鋸臂上,通過內部帶有錐齒輪的行星輪系,使鋸片和電機始終做與鋼管軋制方向垂直的平動;同時,鋸臂與導輪都通過主電機驅動,因而能保證鋸臂與導輪的同步轉速。其與往復式熱鋸相比,具有投資小,效率高,占地面積小,可自動實現優化切割等優點。其結構簡圖如圖7所示。

圖7 旋轉熱鋸結構簡圖
此裝置主要由傳動部分,鋸臂、內部周轉輪系、導輪及鋸片與電機等組成。通過底部三個錐齒輪將主電機的運動分為兩路傳出,一路驅動導輪轉動,一路驅動鋸臂轉動,這就保證了鋸臂與導輪具有相同的轉速。上部錐齒輪1(太陽輪)與前述鋼管橫移裝置用途相同,空套在軸上,其作用是通過調整此錐齒輪可對鋸片與電機的方向進行微調,以保證鋸片始終與鋼管軋制線垂直。
對于由圓錐齒輪所組成的周轉輪系,此裝置為雙排錐齒輪外嚙合周轉輪系,齒數Z1=Z2=Z2’=Z3,鋸臂角速度為ωH,則鋸片的合成運動為平動。
4 結 語
(1)通過對寶雞石油鋼管有限責任公司鋼管橫移裝置和旋轉熱鋸的組成原理和運動過程的研究分析可知,這些機構都是由惠斯頓杠桿機構演化而來,都具有轉臂和微調裝置,較步進梁式鋼管橫移裝置,其結構簡單、效率高、易于維護。
(2)鋼管橫移裝置無論是從低位移動到高位或由高位到低位移動,都能夠在保證管坯表面質量的前提下平穩、迅速、準確地橫移管坯,而且能夠減少噪聲,改善工作環境。旋轉熱鋸能夠實現在線鋼管的切頭、尾和定尺切割功能,控制過程自動、靈活,可根據母管長度自動優化切割,因而在制管和棒材生產線上得到廣泛的應用。
[1]哈爾濱工業大學理論力學教研室.理論力學上冊[M].第5版.北京:高等教育出版社,1996.
[2]孫桓,陳作模.機械原理[M].第6版.北京:高等教育出版社,2000.
[3]趙子瑜.新編焊接鋼管生產技術與質量檢測標準匯編實用全書[M].北京:北京工業大學出版社,2006.
[4]聞邦椿.機械設計手冊[M].北京:機械工業出版社,2010.
[5]樓鴻棣.鄒惠君.高等機械原理[M].北京:高等教育出版社,1990.
[6]成大先.機構設計手冊 [M].北京:化學工業出版社,2002.[7]濮良貴.紀名剛.機械設計[M].第7版.北京:高等教育出版社,2001.
[8]范欽珊.工程力學[M].第2版.北京:清華大學出版社,2012.
[9]機械工程師手冊編委會.機械工程師手冊[M].北京:機械工業出版社,2007.
[10]鄭文緯.機械原理[M].北京:高等教育出版社,1997.
