農(nóng)藥噴灑多旋翼無(wú)人機(jī)控制系統(tǒng)研究
2015-01-27 07:36:42黃水長(zhǎng)趙偉雄
自動(dòng)化與儀表 2015年5期
關(guān)鍵詞:系統(tǒng)
黃水長(zhǎng) ,栗 盼 ,趙偉雄
(1.河北工程大學(xué) 信息與電氣工程學(xué)院,邯鄲 056038;2.貴州大學(xué) 電氣工程學(xué)院,貴陽(yáng) 550025)
目前我國(guó)農(nóng)藥噴灑方式主要為地面人工噴灑,落后的噴灑器具和技術(shù)普遍存在,與當(dāng)前農(nóng)藥的發(fā)展水平極不相稱,已對(duì)農(nóng)林業(yè)病蟲草害的防治帶來(lái)了很多不良的影響,比如對(duì)農(nóng)藥的利用率低,農(nóng)藥殘留、作物藥害、污染環(huán)境等。另外,這些方式噴灑效率低,還可能會(huì)對(duì)工作人員的健康造成威脅[1]。無(wú)人駕駛飛機(jī)UAV(unmanned aerial vehicle)近幾年發(fā)展比較迅速,尤其是多旋翼無(wú)人機(jī),它憑借其成本低、飛行靈活、可低空低速飛行等特點(diǎn),在很多領(lǐng)域都得到了一定的應(yīng)用,比如軍事偵察、空中航拍、交通監(jiān)測(cè)、地形勘測(cè)等[2]。在農(nóng)業(yè)領(lǐng)域中,采用多旋翼無(wú)人機(jī)進(jìn)行農(nóng)藥噴灑工作具有作業(yè)高度低、可定點(diǎn)噴灑、無(wú)需起落跑道等特點(diǎn),可以明顯提高作業(yè)效率,并且其旋翼往下產(chǎn)生的氣流可以讓農(nóng)藥噴霧得到更好的穿透性,提高防治效果和農(nóng)藥的利用率[3]。本文結(jié)合空中作業(yè)噴灑農(nóng)藥對(duì)無(wú)人機(jī)飛行的需求,對(duì)小型多旋翼無(wú)人機(jī)的控制系統(tǒng)進(jìn)行研究。
1 控制系統(tǒng)總體設(shè)計(jì)
1.1 系統(tǒng)需求
為了能夠方便、安全、可靠地進(jìn)行空中噴灑農(nóng)藥,以下針對(duì)多旋翼無(wú)人機(jī)的特點(diǎn),對(duì)控制系統(tǒng)提出需求:
(1)處理器具有良好的運(yùn)算性能,能夠滿足控制軟件的運(yùn)行要求。
(2)具有姿態(tài)估計(jì)系統(tǒng),能夠得到較精確的實(shí)時(shí)無(wú)人機(jī)姿態(tài)及高度。
(3)具有高度自鎖定功能,可以在作物上空定高進(jìn)行農(nóng)藥噴灑,防止因?yàn)閲姙⒏叨炔灰恢聦?dǎo)致作物藥害的情況發(fā)生。
(4)具備無(wú)線通信功能,能夠與遙控器和地面站通過(guò)無(wú)線進(jìn)行連接。如果與遙控器失聯(lián),無(wú)人機(jī)必須懸停在原地并關(guān)閉噴灑系統(tǒng)。
(5)可通過(guò)輸出脈寬調(diào)制 PWM(pulse width modulation)波形的方式對(duì)噴灑系統(tǒng)的噴灑速度進(jìn)行動(dòng)態(tài)控制。以便滿足不同農(nóng)藥試劑和作物對(duì)噴灑速度的不同需求。
1.2 總體設(shè)計(jì)
為了減少不同功能之間的耦合會(huì)增強(qiáng)系統(tǒng)的可維護(hù)性,控制系統(tǒng)采用模塊化設(shè)計(jì),總體結(jié)構(gòu)如圖1所示。
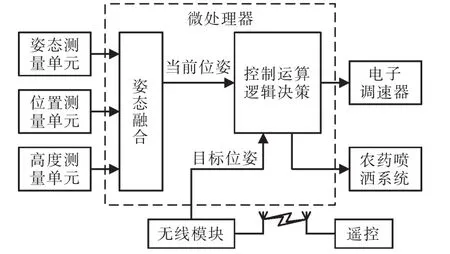
圖1 系統(tǒng)組成框圖Fig.1 Block diagram of the system
多旋翼無(wú)人機(jī)是一種復(fù)雜的系統(tǒng),它在空間有6個(gè)自由度,分別是沿機(jī)身3個(gè)軸平移和旋轉(zhuǎn)[4]。在姿態(tài)控制方面,由于其平移速度和旋轉(zhuǎn)角度存在直接耦合關(guān)系,所以要想滿足在空中穩(wěn)定飛行,前提便是利用精確的傳感器結(jié)合有效的融合算法獲取較精確的姿態(tài)數(shù)據(jù)。
由于無(wú)人機(jī)的飛行范圍比較大,與其通信的方式若采用有線將造成諸多不便,所以在通訊方面,系統(tǒng)采用無(wú)線的方式與其連接。無(wú)人機(jī)的動(dòng)力來(lái)源于旋翼電機(jī),在電機(jī)控制方面,為了能夠獲得良好的控制效果和維護(hù)便捷性,采用模塊化的電子調(diào)速器控制,主控芯片只需給其提供PWM波形即可。當(dāng)今電動(dòng)噴灑系統(tǒng)大多是利用PWM控制噴灑速度[5],所以,為滿足噴灑控制,系統(tǒng)具備輸出PWM波形功能。
2 控制系統(tǒng)硬件設(shè)計(jì)
2.1 部件選型
(1)處理器:系統(tǒng)所有的傳感器數(shù)據(jù)都由處理器采集并運(yùn)算,同時(shí)給出控制數(shù)據(jù)和控制邏輯,所以處理器是控制系統(tǒng)的硬件核心單元,選擇一個(gè)合適的處理器對(duì)系統(tǒng)的整體效果非常重要。本文采用意大利ST公司的STM32F427VIT6處理器,它是一個(gè)32位處理器,采用ARM Cortex-M4內(nèi)核,主頻最高可達(dá)到168 MHz,內(nèi)部資源豐富,并且擁有內(nèi)存直接訪問(wèn)DMA(direct memory access)功能和浮點(diǎn)運(yùn)算單元FPU(float point unit),能在最小干預(yù)的情況下快速完成數(shù)據(jù)搬運(yùn)和浮點(diǎn)運(yùn)算功能,有力保障控制系統(tǒng)的可靠性和實(shí)時(shí)性。
(2)傳感器:姿態(tài)測(cè)量系統(tǒng)含有的傳感器包括加速度計(jì)、陀螺儀、電子羅盤和氣壓計(jì)。考慮到測(cè)量精度和系統(tǒng)體積的大小,本文采用MPU6000芯片,它是集三軸加速度計(jì)和三軸陀螺儀一體的高精度數(shù)字接口傳感器,通過(guò)SPI接口和主控芯片進(jìn)行通信,通信速度可達(dá)18 Mb/s。電子羅盤采用美國(guó)Honeywell公司的HMC5843芯片,可以靈敏地探測(cè)到微小的磁場(chǎng)強(qiáng)度變化,利用地磁校正無(wú)人機(jī)方向。氣壓傳感器采用瑞士MEAS公司設(shè)計(jì)的MS5611,憑借其超低功耗、超高精度的24位Σ型AD轉(zhuǎn)換器和高線性度壓力傳感器,高度測(cè)量精度可達(dá)到0.1 m。由于實(shí)際飛行中,大氣壓會(huì)受到各種因素的影響,導(dǎo)致無(wú)人機(jī)測(cè)量的高度不準(zhǔn)確,所以,本文額外采用一個(gè)超聲波測(cè)距模塊,能在0.1 m~5 m的有效測(cè)量范圍內(nèi)達(dá)到0.02 m的精度,并且具有一定的抗干擾性,有效保證無(wú)人機(jī)噴灑工作時(shí)的高度鎖定功能。
(3)無(wú)線通訊:無(wú)人機(jī)起飛后旋翼速度非常高,在人不能接近的情況下,必須保證能夠控制其飛行方向和速度,所以無(wú)線部分不可或缺,本文采用XBEE技術(shù)與無(wú)人機(jī)進(jìn)行無(wú)線通訊,在功放的作用下,有效傳輸距離能達(dá)到1 km,能保證在噴灑工作時(shí)連接的穩(wěn)定性。為了節(jié)省無(wú)線帶寬和方便布線,采用脈沖位置調(diào)制PPM(pulse position modulation)方式對(duì)控制系統(tǒng)與遙控器之間的通信信號(hào)進(jìn)行調(diào)制處理。
2.2 硬件設(shè)計(jì)
系統(tǒng)的硬件結(jié)構(gòu)如圖2所示。由于無(wú)人機(jī)在飛行時(shí)旋翼電機(jī)產(chǎn)生較大的電流,并且電流變化較快,會(huì)產(chǎn)生電磁干擾,所以為了減少通訊出錯(cuò),超聲波模塊與控制芯片的連接經(jīng)過(guò)MAX485芯片進(jìn)行電平轉(zhuǎn)換,采用485協(xié)議進(jìn)行通信,增強(qiáng)抗共模干擾能力。同時(shí)為了減少傳輸信號(hào)的反射,在總線的起始端和末尾端各接上一個(gè)120 Ω的匹配電阻。電平轉(zhuǎn)換電路如圖3所示。
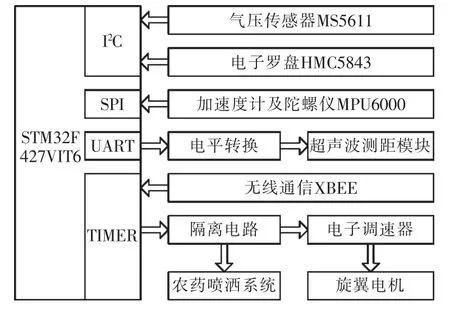
圖2 系統(tǒng)硬件結(jié)構(gòu)Fig.2 Hardware architecture of the system
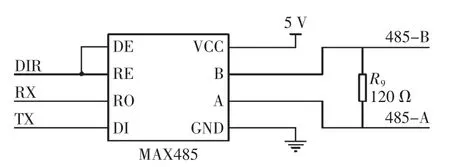
圖3 電平轉(zhuǎn)換電路Fig.3 Level conversion circuit
由于電機(jī)的速度時(shí)刻在變化,電壓也隨著波動(dòng),為了防止電機(jī)的反向電壓通過(guò)電調(diào)回饋至主控電路燒毀器件,主控芯片與電調(diào)之間的連接必須采用隔離電路。另一方面,為了精確地控制電機(jī)的轉(zhuǎn)速,電調(diào)輸入的PWM頻率采用400 Hz的高刷新率。普通的光耦頻率不能滿足,并且體積較大,不利于控制系統(tǒng)的集成[6]。結(jié)合這2個(gè)因素,系統(tǒng)采用2片ADI公司的4通道數(shù)字信號(hào)隔離芯片AduM1411進(jìn)行信號(hào)隔離,它能在1.3mA的工作電流下達(dá)到2 M的傳輸速率,能在有效保證PWM信號(hào)真實(shí)度的前提下,降低系統(tǒng)功耗和保護(hù)主控電路的安全。對(duì)噴灑系統(tǒng)的控制也采用PWM方式,隔離方式和電調(diào)隔離方式一致,電路如圖4所示。
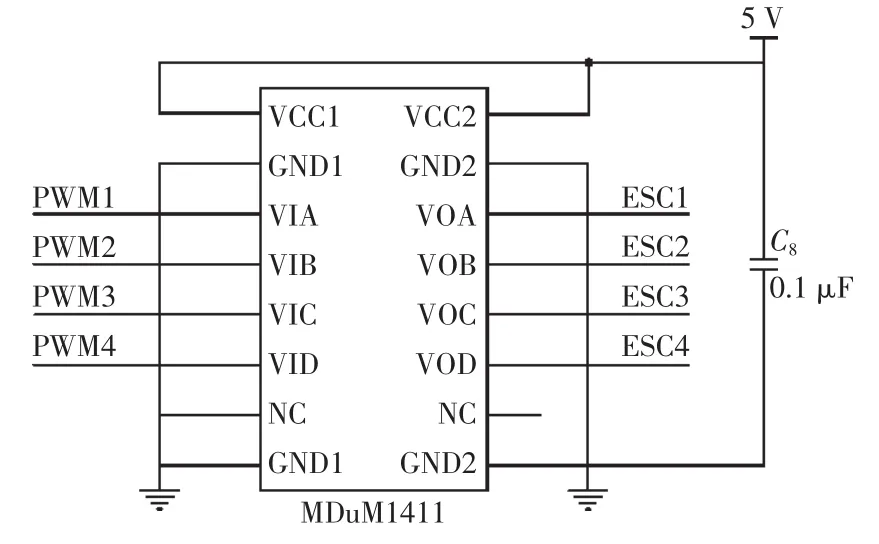
圖4 信號(hào)隔離電路Fig.4 Signal isolation circuit
3 控制系統(tǒng)軟件設(shè)計(jì)
軟件的主要功能為姿態(tài)獲取及控制、遙控?cái)?shù)據(jù)解析、通信狀況實(shí)時(shí)分析。與功能相對(duì)應(yīng),將農(nóng)藥噴灑無(wú)人機(jī)的系統(tǒng)軟件分為3大部分。軟件流程如圖5所示。
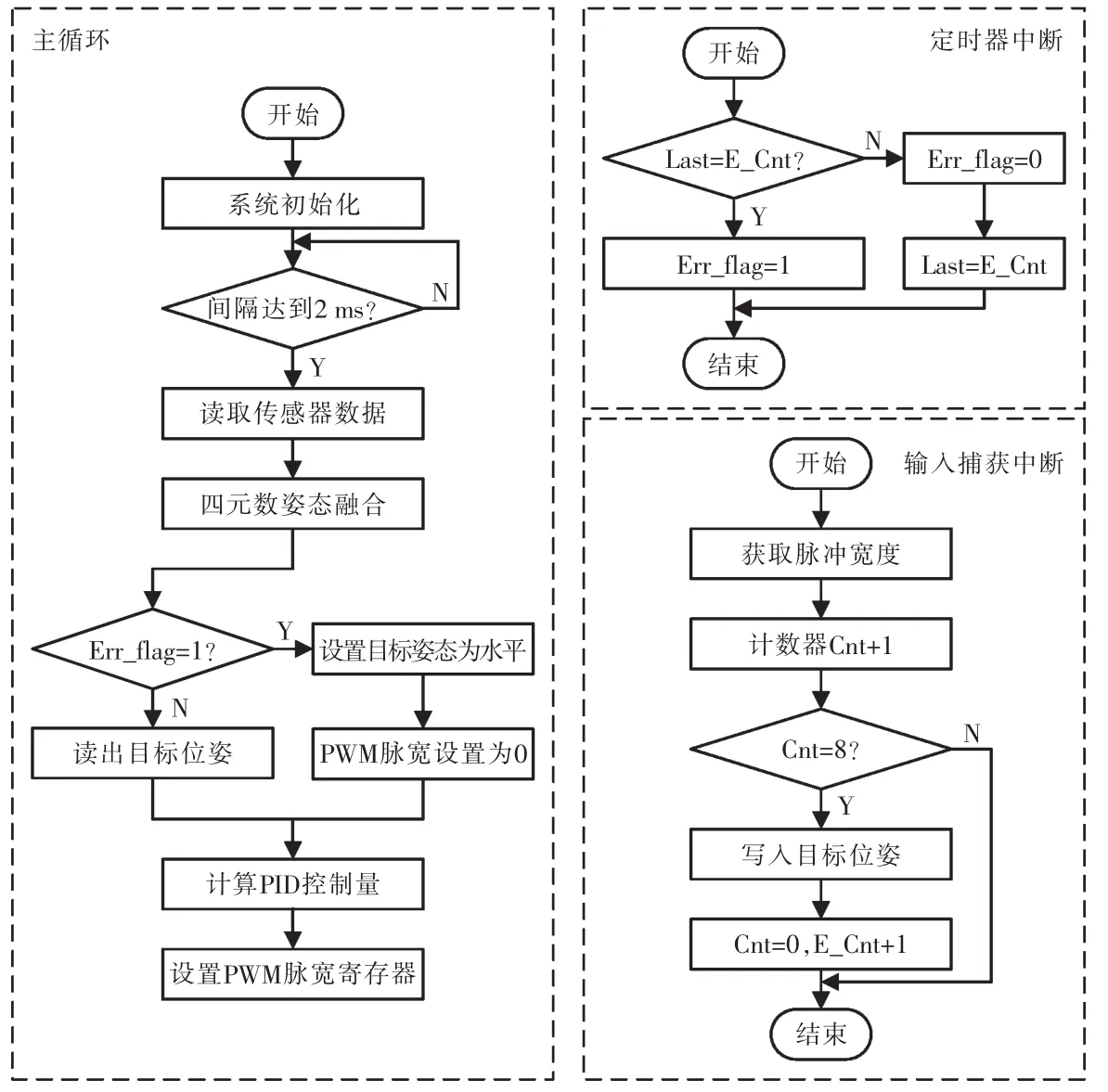
圖5 軟件流程圖Fig.5 Flow chart of the program
第1部分利用主控芯片的PWM輸入捕獲功能,在捕獲中斷子程序中獲取遙控器的8路數(shù)據(jù),計(jì)算目標(biāo)位姿并存入內(nèi)存等待主函數(shù)讀取,退出前將消息計(jì)數(shù)器的值加1,為判斷無(wú)人機(jī)與遙控器之間的聯(lián)系是否中斷提供依據(jù)。
第2部分是定時(shí)器中斷函數(shù),每隔25 ms運(yùn)行一次,檢查遙控器計(jì)數(shù)值是否發(fā)生變化,若中斷函數(shù)中存儲(chǔ)的值與當(dāng)前遙控器數(shù)據(jù)計(jì)數(shù)值不相等,說(shuō)明通信正常,若相等,則說(shuō)明無(wú)人機(jī)與遙控器已經(jīng)失去聯(lián)系,此時(shí)立刻設(shè)置通信錯(cuò)誤標(biāo)志位,通知主函數(shù)采取相應(yīng)措施。
第3部分為主函數(shù)部分,大多數(shù)功能都在此實(shí)現(xiàn)。系統(tǒng)啟動(dòng)后首先初始化各個(gè)模塊,然后依次讀取各個(gè)傳感器的數(shù)據(jù)進(jìn)行位姿計(jì)算[7],若此時(shí)發(fā)現(xiàn)通訊錯(cuò)誤標(biāo)志,則把目標(biāo)位姿數(shù)據(jù)設(shè)置為水平,無(wú)人機(jī)將會(huì)停在原地,并關(guān)閉噴灑系統(tǒng);若未發(fā)現(xiàn)通訊錯(cuò)誤標(biāo)志,則讀取輸入捕獲中斷程序提供的目標(biāo)位姿信息,運(yùn)行PID控制算法獲取控制量并轉(zhuǎn)換成脈沖寬度數(shù)據(jù)[8],最后通過(guò)DMA將數(shù)據(jù)硬件搬運(yùn)至相應(yīng)的寄存器,從而改變旋翼電機(jī)的轉(zhuǎn)速,達(dá)到快速調(diào)節(jié)的效果。
4 實(shí)驗(yàn)結(jié)果
將設(shè)計(jì)的控制系統(tǒng)搭載四旋翼飛行器機(jī)架在室外進(jìn)行試飛,通過(guò)地面站獲取無(wú)人機(jī)的姿態(tài)角信息,將其導(dǎo)入至Matlab仿真軟件中,繪制出3個(gè)姿態(tài)角:翻滾角、俯仰角、航向角和高度的跟蹤曲線,分別如圖6和圖7所示。從曲線可看出,本文設(shè)計(jì)的控制系統(tǒng)能夠快速地跟蹤遙控器給出的目標(biāo)姿態(tài),并且在調(diào)節(jié)穩(wěn)定后,實(shí)際輸出曲線和參數(shù)輸入曲線非常接近,實(shí)現(xiàn)了很小的控制誤差,驗(yàn)證了控制系統(tǒng)的有效性。
5 結(jié)語(yǔ)
針對(duì)我國(guó)當(dāng)前農(nóng)藥噴灑方式的弊端,對(duì)一種小型多旋翼農(nóng)藥噴灑無(wú)人機(jī)的控制系統(tǒng)進(jìn)行研究,以STM32做為主控芯片,結(jié)合多種傳感器,實(shí)現(xiàn)了無(wú)人機(jī)姿態(tài)的估計(jì)和控制。經(jīng)過(guò)多次試飛,驗(yàn)證了系統(tǒng)良好的控制性能。此外,系統(tǒng)可在飛行中動(dòng)態(tài)地對(duì)噴灑系統(tǒng)進(jìn)行開關(guān)控制、在通訊中斷的情況下采取應(yīng)對(duì)措施保證無(wú)人機(jī)和操作者的安全,能夠滿足空中噴灑農(nóng)藥對(duì)飛行的需求。
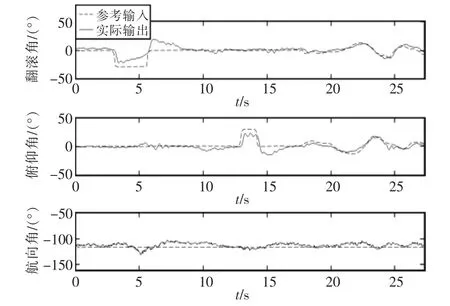
圖6 姿態(tài)角控制跟蹤曲線Fig.6 Attitude control tracking curve

圖7 高度控制跟蹤曲線Fig.7 Altitude control tracking curve
[1]賈衛(wèi)東,張磊江,燕明德,等.噴桿噴霧機(jī)研究現(xiàn)狀及發(fā)展趨勢(shì)[J].中國(guó)農(nóng)機(jī)化學(xué)報(bào),2013(4):19-22.
[2]李一波,李振,張曉東.無(wú)人機(jī)飛行控制方法研究現(xiàn)狀與發(fā)展[J].飛行力學(xué),2011,29(2):1-5,9.
[3]徐興,徐勝,劉永鑫,等.小型無(wú)人機(jī)機(jī)載農(nóng)藥變量噴灑系統(tǒng)設(shè)計(jì)[J].廣東農(nóng)業(yè)科學(xué),2014,41(9):207-210.
[4]甄紅濤,齊曉慧,夏明旗,等.四旋翼無(wú)人直升機(jī)飛行控制技術(shù)綜述[J].飛行力學(xué),2012,30(4):295-299.
[5]張濤濤,張文愛,王秀.基于PWM變量農(nóng)藥噴灑控制系統(tǒng)的研究[J].農(nóng)機(jī)化研究,2012(7):57-60.
[6]溫習(xí),閻永祿.典型信號(hào)隔離電路設(shè)計(jì)[J].四川兵工學(xué)報(bào),2011,32(8):94-95.
[7]喬相偉,周衛(wèi)東,吉宇人.基于四元數(shù)粒子濾波的飛行器姿態(tài)估計(jì)算法研究[J].兵工學(xué)報(bào),2012,33(9):1070-1075.
[8]王史春.四旋翼飛行器PID優(yōu)化控制[J].河北科技大學(xué)學(xué)報(bào),2013,34(5):457-463,486.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32