工業機器人運動控制系統的設計與實現
2015-01-27 07:36:51施文龍閔華松
自動化與儀表 2015年5期
關鍵詞:設計
施文龍,閔華松
(武漢科技大學 冶金自動化及檢測技術教育部工程研究中心,武漢 430081)
工業機器人[1]廣泛應用于工業領域。除機器人本體、驅動裝置之外,控制系統[2]是工業機器人最重要的組成部分。工業機器人在軌跡空間中的運動,除直線、圓弧等基本的運動之外,有時需要進行比較復雜的運動。由于NURBS方法在復雜的幾何造型等方面的優勢,其在CAD/CAM中被廣泛應用。因此,研究NURBS軌跡規劃[3],采用實時性好可靠性強的NURBS插補算法,具有現實意義。利用工控機[4]的穩定性高、防潮、防塵、防振以及可擴展等優點,再以DMC-2163運動控制卡[5]為控制核心,可保證控制系統在硬件上的強勁和可靠。
目前國內已有的特定的工業機器人控制系統只能用于特定的機器人,擴展性和通用性有待提高。本文在已有6自由度工業機器人UPR100本體的基礎上設計和實現的運動控制系統,不僅可精確可靠地完成對機器人的運動控制,通過修改控制系統中關于機器人的參數,可用于控制其它的6自由度機器人,極大增強了通用性。控制系統采用模塊化的設計原則,提高了功能擴展性。
1 控制系統總體方案
在已有6自由度工業機器人機械本體的基礎上,本文設計并實現了整套控制系統。該控制系統包含硬件和軟件2部分。硬件部分為整個控制系統提供良好的物質基礎,用于執行軟件部分所規定的操作。軟件部分作為控制系統的靈魂,需要完成包括但不僅限于以下任務:
1)機器人運動學正逆解[6];
2)機器人程序的解析與譯碼、軌跡規劃、插補運算;
3)驅動機器人各關節運動和機器人末端相應裝置的動作。
2 控制系統硬件設計
針對6自由度工業機器人,本文采用基于ARM工控機的運動控制方案。使用DMC-2163控制卡作為下位機模塊。工控機通過以太網向DMC-2163發出控制命令,DMC-2163根據命令執行相應的程序發出電機控制信號。指令信號經過伺服放大器放大之后,驅動工業機器人的各個電機轉動,從而使各個關節運動;機器人各個關節對應的電機編碼器能夠將位置信號經DMC-2163通過以太網反饋給工控機,這樣機器人的狀態就可以被實時地顯示和監控。控制系統硬件架構如圖1所示。
2.1 DMC-2163運動控制卡
Galil公司研發和生產的DMC系列控制器,能很好地滿足數控設備的精度與性能需要。本文針對的是6自由度的工業機器人,選用DMC-2163運動控制器。同時使用提供的API,可以在工控機上對其進行二次開發。
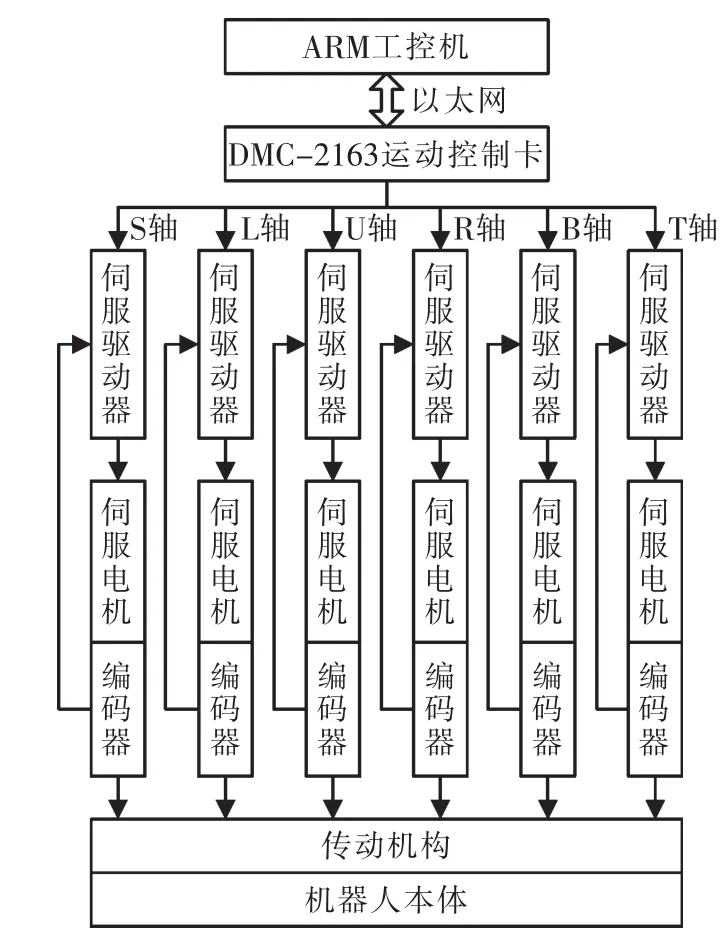
圖1 控制系統硬件架構Fig.1 Hardware structure of the robot control system
2.2 嵌入式ARM工控機
針對硬件系統需要的穩定、可靠和高性能等特點,系統選用嵌入式的Freescale IMX6工控機,其CPU為Cortex-A9核心處理器,主頻高達1.2 GHz,最高支持到32 G的存儲器。工控機上硬件資源豐富,完全滿足作為機器人控制系統上位機的要求。
3 控制系統軟件設計與實現
3.1 NURBS插補實現
在空間中的NURBS曲線的有理分式形式[7]可定義為
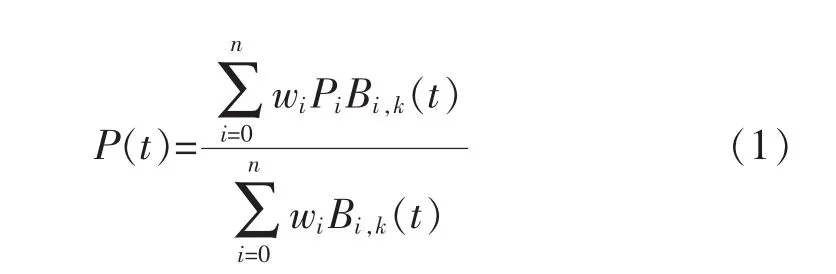
式中:Pi(i=0,1,…,n)為控制頂點;wi為對應控制頂點的權因子;Bi,k(t)為 k 次 B 樣條基函數,其定義為取u0,u1,…,un+k共n+k+1個節點值組成節點向量(u0,u1,…,un+k)(一般取 u0=u1=…=uk=0,un=un+1=…=un+k=1)。令:

式中,參數 t的變化范圍為[t1,t2]=[uk,un]。則 Bi,j(t)可定義為

式中,當分母為0時,定義式中的分式的值為0。
3.1.1 NURBS 插補算法
由給定的控制頂點、與控制頂點相對應的權因子以及節點矢量可唯一確定NURBS曲線。而NURBS曲線的插補,其實質在于使用一個插補周期內的步長折線段去近似地逼近NURBS曲線本身。所以NURBS插補的實現需要至少解決2個基本問題:1)密化參數,也就是把軌跡空間中的進給步長ΔL映射到參數空間,求出相應的參數增量Δu及新點的參數坐標 ui+1=ui+Δu;2)計算軌跡,也就是將得到的參數空間中的坐標值反向映射回軌跡空間,得到對應的映射點pi+1=p(ui+1),即插補軌跡的新的坐標點。
3.1.1.1 插補前的預處理
為提高NURBS曲線的插補速度、保證實時性,在插補前進行預處理以減少插補的計算量。預處理是指在插補前確定NURBS的軌跡表達式,這將通過控制頂點、對應的權因子以及節點矢量來完成。NURBS曲線是分段參數曲線,實際應用中常采用3次NURBS曲線,其每一段可表示為

式中,當參數u變化時,每段曲線的分子、分母的系數也會隨著改變。
3.1.1.2 參數密化
針對參數密化問題,本文的解決思路是采用阿當姆斯算法,同時利用前、后向差分結合代替微分的方法來避免復雜的隱式方程求解和微分運算。最終,可得到新插補點的參數估計值為

3.1.1.3 軌跡計算
針對軌跡計算問題,先求得參數ui+1,再將其轉換為ti+1,然后帶入式(4)得到下一個插補點的位置:

通過這種參數密化和軌跡計算的方法,可在每一個插補周期內得到下一個插補點,重復這種方式直到插補結束,可得到整個NURBS曲線的插補軌跡。
在機器人的軌跡規劃和插補中,給出曲線中幾個關鍵點的機器人的位置和姿態,按照上述的基本插補算法和機器人的運動學正逆解就可得到曲線上各插補點的位置和姿態。
3.1.2 NURBS 插補算法的 Matlab 仿真
為證實本文選用[8]的插補算法的有效性,使用Matlab平臺進行算法仿真。由50個控制頂點、權值為1、在0和1之間的控制節點確定的3階NURBS曲線,Matlab仿真時的插補參數為最大進給速度fmax=18mm/min;初始進給速度 fs=0;插補周期 T=1ms;弓高誤差上限hmax=1 μm;最大法向進給加速度為0.8 g; 步長誤差上限 δmax=0.001; 最大加加速度 J=50000 mm/s3;加速度上限 Amax=2500 mm/s2。
仿真結果如圖2和圖3所示。
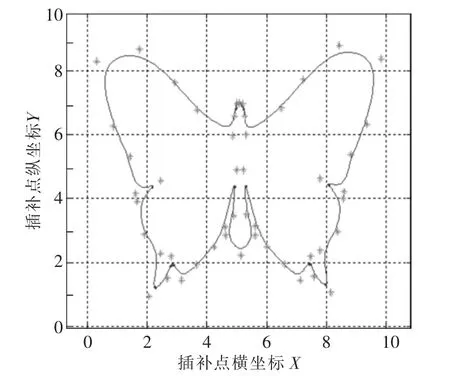
圖2 NURBS曲線插補軌跡Fig.2 Interpolation trajectory
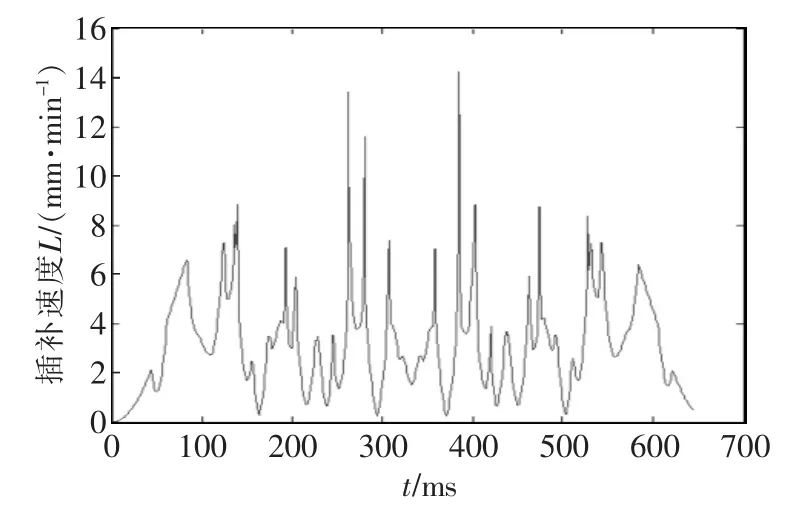
圖3 進給速度Fig.3 Feed speed
從圖2和圖3可知,生成的插補點均在規劃好軌跡之上,插補速度等指標都在理論允許范圍之內。
3.2 ARM工控機上軟件設計與實現
工業機器人運動控制系統的軟件部分在ARM工控機[9]上實現。首先需要配置軟件開發環境:在Freescale IMX6上面安裝Linux系統的ubuntu版本,移植嵌入式Qt[10],并將DMC控制卡的Linux下的庫移植到ubuntu中。
控制軟件采用圖形用戶界面,使用QMainWindow類構建主框架,使用QWidget類、QDialog類實現各個模塊的功能,各模塊之間的信息交流通過Qt的信號/槽機制、全局變量、事件管理、配置文件等方式實現。控制軟件系統框圖如圖4所示。
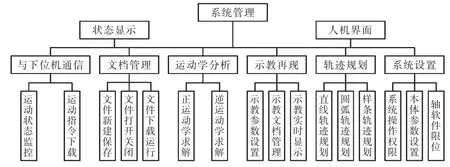
圖4 控制系統軟件框圖Fig.4 Block diagram of software system
1)與下位機通訊模塊。主要利用DMCComandOM()函數讀取各編碼器的值,獲取機器人各關節轉角,用于后續的正逆運動學計算和軌跡規劃;另外用DMCDownloadFile()函數把運動控制指令下載到DMC-2183運動控制卡中。
2)文檔管理模塊。該模塊可進行新建、保存文檔等操作,文檔中是能被DMC-2163控制卡解析的二字符指令集,用于對機器人各軸進行代碼級別的測試與簡單控制。
3)運動學分析模塊。已知機器人各關節轉動的角度,求機器人末端在空間中的位置和姿態,這稱為運動學正解。若末端連桿的位置和姿態已知,反求機器人各關節轉動的角度則稱為運動學逆解。這是整個控制軟件實現機器人正確運行的基礎,同時檢驗機器人是否已達到目標點,以便設計人員及時發現錯誤。
4)人機界面模塊。人機界面主要用于機器人運動狀態數據的顯示與更新,以及用戶輸入相關設置參數,使用戶能實時監控機器人狀態并對其進行相應控制。
5)軌跡規劃模塊。為機器人的作業任務中需要使用到的基本運動形式打下基礎。除實現最基本的直線運動和圓弧運動插補外,還完成NURBS軌跡插補,實現自由的曲線運動。
6)示教再現模塊。完成機器人復雜作業的示教模式和再現模式操作界面,示教完成之后通過再現模式界面自動重現示教動作。
7)系統設置。設置系統進入密碼、機器人本體參數、機器人各軸運動的極限位置等。其中,通過設置機器人本體參數,可以使本控制系統軟件用于其它的基于同樣硬件架構的6自由度工業機器人,這體現了設計的控制系統的通用性。
8)狀態顯示模塊。完成控制卡I/O狀態、機器人位姿狀態、作業完成進展等重要信息的顯示。
3.2.1 機器人參數設置
機器人參數包括了運動學方面D-H參數、伺服驅動相關的分頻比/倍頻比。其中D-H參數決定了6自由度工業機器人的本體結構。分頻比/倍頻比決定了工控機通過DMC控制卡發送單個脈沖時對應機器人關節的轉動角度。
3.2.2 機器人軌跡規劃
Galil公司DMC系列運動控制器種類齊全,適合解決復雜的運動問題。DMC-2163控制器的輪廓模式使用戶可在1~6軸內定義自由的位置—時間曲線,因而可非常理想地跟蹤通過計算機產生的軌跡。在設計的機器人運動控制系統中,空間運動規劃以及機器人的運動學正逆解將由工控機內的算法完成,通過DMC-2163的輪廓模式完成各關節的運動協調控制,空間運動軌跡的插補周期為32 ms。
流程如下:首先,將空間軌跡的參數方程建立出來,每隔32 ms算出運動軌跡的空間坐標,坐標向量表示為(x,y,z)。而機器人末端空間坐標向量經機器人運動學反解后,即可計算得到對應的各關節的關節變量。電機軸的脈沖量需由上述得到的各關節變量變換求出,這是因為DMC的各電機控制變量是通過發送一定的脈沖量來完成。當前各軸的脈沖增量通過計算得到,相應的軌跡規劃文本 *.dmc記錄各脈沖增量。軌跡規劃流程圖如圖5所示。
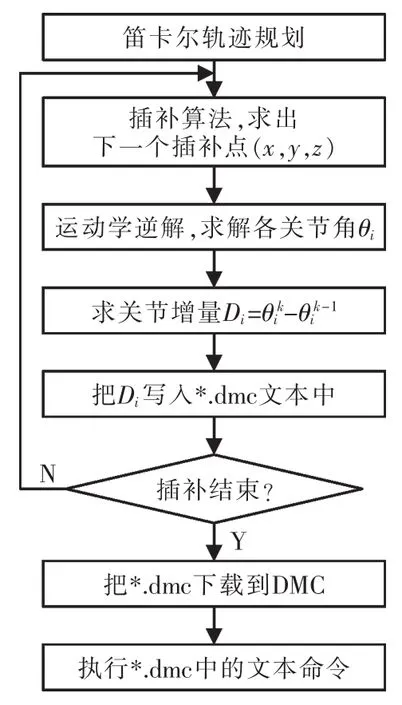
圖5 DMC上實現軌跡規劃的流程Fig.5 Flow chart of trajectory planning in the DMC
然后通過調用DMC-2163提供的API函數庫中的文件下載函數DownloadFile(),將上述產生的軌跡規劃文本*.dmc下載到DMC中。最后,調用Command()執行文本中的命令,使機器人的末端完成由用戶自己定義的軌跡。
3.2.3 機器人示教作業
機器人通過設計的控制系統完成特定的作業,采用示教和再現模式。在示教界面選擇合適的坐標系,通過軸控制按鈕控制機器人末端運動到位置點,再選擇具體的運動指令及指令參數,使機器人末端按照直線、圓弧或其他自由形狀的軌跡運動到目標點。示教模塊中實現了基本的運動指令集,包括 MOVJ、MOVL、MOVC、MOVS、NURBS 等,以及包括延時、數字運算等在內的其他指令。使用機器人的運動學求解結果,得到機器人各關節需要轉動的角度,發送命令給DMC控制卡,從而完成對機器人作業的操作。
3.3 軟件系統運行
設計的控制軟件系統各模塊完成并測試成功后,融入應用程序主框架,最終完成系統的設計和實現。控制軟件系統測試成功后,得到的運行效果如圖6所示,系統順利運行,達到了設計效果。
4 結語
本文針對已有UPR100機器人本體,設計和實現了其控制系統。該控制系統在硬件方面以DMC-2163控制卡和嵌入式ARM工控機為核心;在工控機的ubuntu平臺下搭建Qt環境,并在此基礎上設計和開發了控制軟件。控制系統融入了NURBS插補算法,使得機器人的末端可在軌跡空間中完成自由曲線的軌跡。控制系統提供圖形界面,操作方便,通用性高、擴展性強,具有一定的實用價值。
[1]蔡自興.機器人學[M].北京:清華大學出版社,2000.
[2]徐達,郝琢,李華,等.彈藥自動裝填機器人控制系統開發平臺設計[J].計算機測量與控制,2011,19(4):125-127.
[3]邱寧佳,隋振,李明哲,等.六自由度機器人空間劃線軌跡規劃算法[J].吉林大學學報:工學版,2013,43(5):160-166.
[4]Vernier M A,Wensing P M,Morin C E,et al.Design of a fullfeatured robot controller for use in a first-year robotics design project[C]//121st Annual American Society for Engineering Education Conference & Exposition,Indianapolis,2014.
[5]胡金義.基于GALIL運動控制器的CAD/CAM軟件系統設計[D].北京:北京郵電大學,2006.
[6]孫學儉,王仙勇,董宇.焊接機器人運動學正逆解[J].北京石油化工學院學報,2011,19(1):30-34.
[7]施法中.計算機輔助幾何設計與非均勻有理B樣條[M].北京:高等教育出版社,2001.
[8]王強.六自由度工業機器人的運動軌跡插補算法的研究[D].浙江:浙江工業大學,2012.
[9]胡波,莫肇鑾,馮興悅,等.基于ARM開發板的機場航顯工控機研究[J].中國科技信息,2014(1):137-139.
[10]陳曦,劉增強.基于Qt/Embedded嵌入式控制界面的設計[J].化工自動化及儀表,2012(9):99-100.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04