基于浮力調節系統的AUV深度控制研究
2015-01-27 06:26:59武建國
自動化與儀表 2015年4期
王 雨 ,鄭 榮 ,武建國
(1.中國科學院 沈陽自動化研究所機器人學國家重點實驗室,沈陽 110016;2.中國科學院大學,北京 100049)
隨著自然資源的日益減少,人類對海洋資源的重視和開發也逐漸加快,研發各種海洋機器人成為目前人類關注的重點,大潛深、長航程、多功能、智能化成為其未來發展趨勢[1-3]。大潛深、長航程AUV受自身重量和體積的限制,自身攜帶的能源有限,并且在作業時浮力受到海水密度變化的影響較大,為解決此問題對AUV航行性能的影響開展了基于浮力調節系統的水下機器人控制技術研究,它對于航行器定深懸浮、大范圍水域自適應調節、輔助航行姿態等具有重要的研究意義和實用價值[4-5]。
關于浮力調節的AUV深度控制國內外有一定的研究,主要有PD控制、滑模控制等,PD控制存在一定的穩態誤差,滑模控制有一定的超調量,容易使AUV發生“觸底”[6-7]。本文主要圍繞AUV航行時海水溫度、鹽度、深度都會發生很大的變化,與此同時AUV的體積也會隨著深度的變化而變化,由于海水密度變化引起的浮力變化和AUV體積變化引起的浮力變化不一致,從而導致AUV的浮力發生較大變化而影響其航行性能[8],設計3種不同的控制方法分別進行AUV深度控制研究,并對這3種控制方法進行比較分析其優越性。
1 深度變化引起的浮力變化
AUV在下潛過程中的浮力變化主要是由下潛過程中海水密度變化引起的浮力變化與AUV排水體積變化引起的浮力變化不一致造成的,引起海水密度變化的主要因素包括溫度、鹽度和壓力,浮力變化隨這3個因素的變化情況可表示為[9]

式中:V0為航行器的初始排水體積;ρ為海水密度;h為航行器下潛深度;α0為海水壓縮系數;αk為殼體壓縮系數;β0為海水熱膨脹系數;βk為殼體熱膨脹系數;Δt為水溫變化量;ΔP為壓力變化量;g為重力加速度;ΔS為鹽度變化量。
利用南海試驗數據,擬合曲線得到溫度變化、壓力變化、鹽度變化與海水深度的關系表達式為

其中:α0=4.5×10-10Pa-1, β0=0.21×10-3K-1,αk=2.89×10-10Pa-1, βk=0.125×10-3m·k-1, ρ=1.025×103kg·m-3,V0=1.5 m3,g=9.8 N·kg-1
把已知數據代入式(1)可以得到:


根據式(5)可得到AUV任意深度下的浮力變化量,進而可得到AUV的水動力模型,以便進行下一步的深度控制研究。
2 AUV水動力學建模
要對AUV進行深度控制,首先要建立水動力學方程。AUV的運動可以分成水平面運動和垂直面運動,為簡化問題,忽略2個平面的耦合以及海流因素的影響,六自由度剛體廣義水動力學方程可以寫成[10]:

式中:M是系統的慣性矩陣;C(v)是科里奧利向心力矩陣;D(v)是阻尼矩陣;g(η)是重力/浮力和力矩向量;τ是控制輸入向量。
本文研究的垂直面運動狀態變量是(u,w,q),假設MA是對角陣,高階阻尼項忽略不計,w?0并且 u,v,p,q,r的二階項很小,初始時刻 AUV 的重力和浮力相等(W=B)、重心和浮心重合(xg=xb),則動力學方程可以寫成:

為研究問題的方便性,假設在深度控制中,BGz=zg-zb=0,u=q=u˙=q˙=0,則上面的方程可以簡化成:

把下列參數[11]代入式(9):

得到水動力學方程:

式中:重力W是水下全排水量P0;浮力B是水下總排水容積浮力B0、海水深度變化引起的浮力變化B(h)和浮力調節系統提供的浮力變化FVBS3者的和,假設初始時刻水下全排水量和水下總排水容積浮力相等,則水動力方程可以寫成:

浮力調節裝置在AUV上的安裝位置如圖1所示。在載體的前后段各布置一個浮力調節裝置,在調節浮力的過程中可以對AUV的航行姿態進行調節。
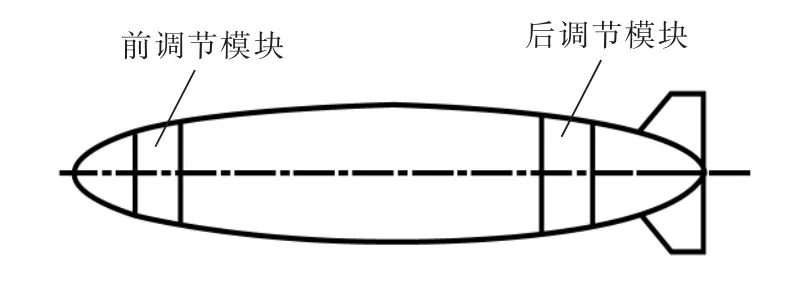
圖1 浮力調節系統在AUV上的安裝示意圖Fig.1 Installation diagram of buoyancy variation system on AUV
3 AUV深度控制研究
根據AUV水動力學方程和浮力調節系統特性參數可以得到AUV的數學模型,進而進行深度控制策略的研究。根據結構框圖2可以看到其基本工作原理是:目標深度作為系統輸入,深度誤差e和誤差變化率ec作為控制器的輸入,控制器的輸出是期望調節的浮力Fg,根據液壓泵流量、浮力調節量和水動力學方程等可得到系統的輸出即AUV的實際深度,深度計作為測量深度的反饋元件,控制器根據反饋信息不斷調節浮力調節裝置到達目標深度。從而實現AUV的定深懸浮功能。
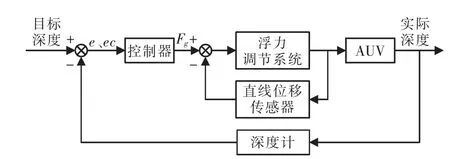
圖2 深度控制結構框圖Fig.2 Structure diagram of depth control
本文采用3種不同的控制方法實現AUV的深度控制:PID控制、模糊控制和模糊自適應PID控制。下面分別介紹3種控制器的建立。
3.1 建立控制器
3.1.1 PID控制
PID控制原理簡單、使用方便、應用廣泛、魯棒性強。這里就不再贅述其建立過程,主要介紹下面2種控制器的建立。
3.1.2 模糊控制
由于PID控制難以處理復雜的非線性系統。而模糊控制對時變的、非線性的被控對象,具有良好的控制效果,魯棒性、抗干擾能力都很強。下面建立模糊控制器:
1)選擇狀態變量、控制變量及其論域:
E 的基本論域是[-7,7];EC 的基本論域是[-2,2];F 的基本論域是[-90,90]。
控制器的輸入量誤差E和誤差變化率EC,輸出懸浮力F。
2)確定隸屬函數及模糊子集
這 3個論域的模糊子集均是{NB,NM,NS,ZO,PS,PM,PB},將輸入輸出變量的論域換成整數論域分為 7 檔,定義是{-3,-2,-1,0,1,2,3},它們分別和模糊子集的7個模糊子集一一對應。
隸屬函數選擇的均是三角形隸屬函數,如圖3所示。
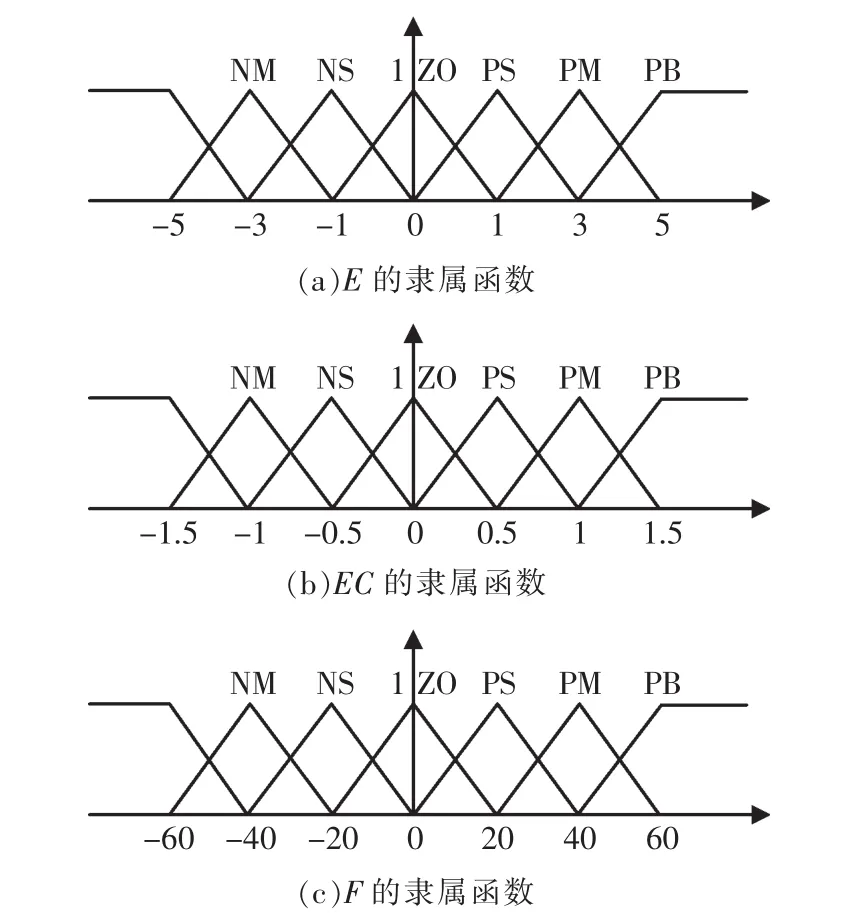
圖3 不同變量隸屬函數Fig.3 Membership function of different variables
3)模糊控制規則表
根據公式型模糊規則,建立模糊控制規則如表1所示,修正因子是0.5。
3.1.3 模糊自適應PID控制
模糊控制不具有對規則進行修正、學習和適應的能力。而模糊自適應PID控制能在線修改參數,抗干擾性能好,適用于非線性、強干擾的復雜系統。
建立模糊自適應PID控制器,首先選擇輸入語言變量為誤差e和偏差變化率ec,選擇輸出語言變量為 ΔKp,ΔKI,ΔKD,輸入和輸出語言變量模糊值均取{NB,NM,NS,Zo,PS,PM,PB},將輸入輸出變量的論域換成整數論域分為 7 檔,定義是{-3,-2,-1,0,1,2,3}。 建立 ΔKp,ΔKI,ΔKD的模糊規則如表 2[12-13]所示。
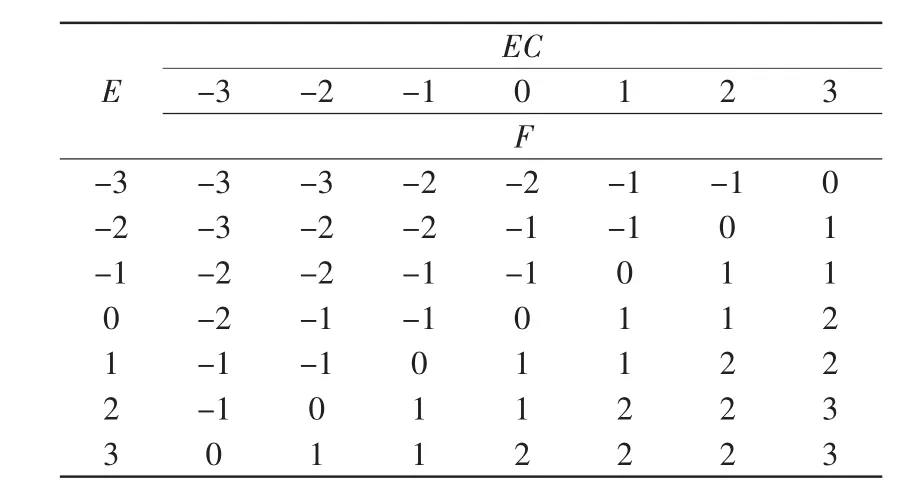
表1 模糊控制規則表Tab.1 Rule table of fuzzy control
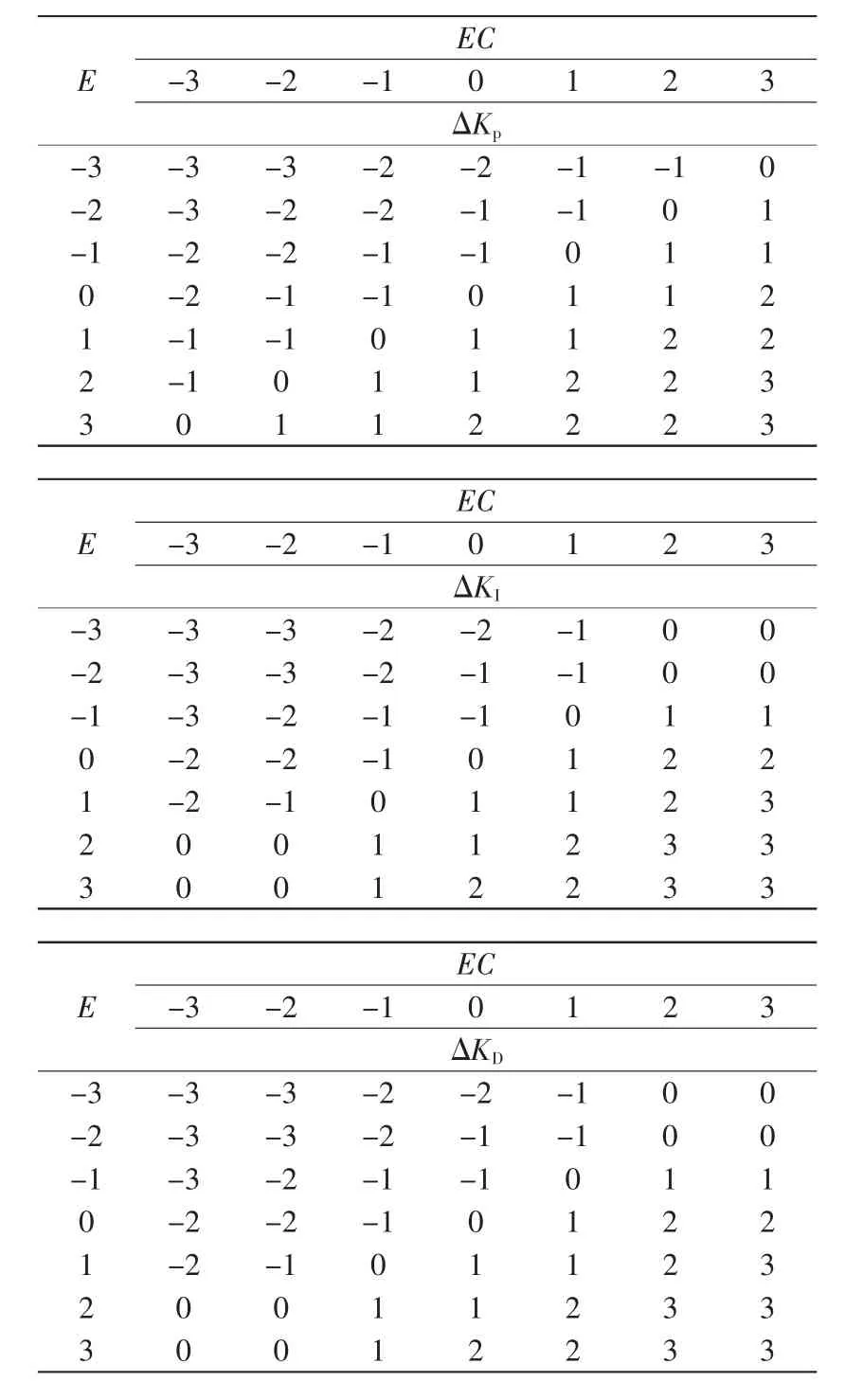
表2 模糊規則表Tab.2 Rule table of fuzzy control on
模糊自適應 PID控制器的參數修正計算式為

式中:α,β,γ為調節系數,通過改變這3個系數就可以得到不同取值范圍的 3 個參數 ΔKP,ΔKI,ΔKD,這樣做可以實現在不改變論域的情況下得到理想效果的 PID 控制參數 ΔKP,ΔKI,ΔKD。
3.2 仿真結果分析
為實現AUV的深度控制,建立Simulink深度控制仿真模型,根據深度控制仿真模型調整控制參數得到仿真曲線如圖4所示,它是AUV實現從0 m到5 m的定深懸浮仿真曲線。
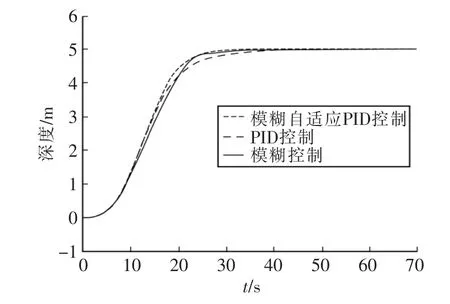
圖4 3種控制方法的深度控制仿真曲線Fig.4 Depth control simulation curve of three control methods
通過調整控制器參數達到理想控制效果,得到的控制器參數分別是:
PID 控制參數:KP=5.0,KI=0.00001,KD=14
模糊控制參數:Ke=0.48,Kec=1.00,Kc=1.38
模糊自適應 PID控制參數:Ke=0.5,Kec=0.7,KP′=5.0,KI′=0.00001,KD′=14,KP=0.8,KI=0.000001,KD=0.05
根據仿真結果得到3種控制方法的響應特性參數如表3所示。
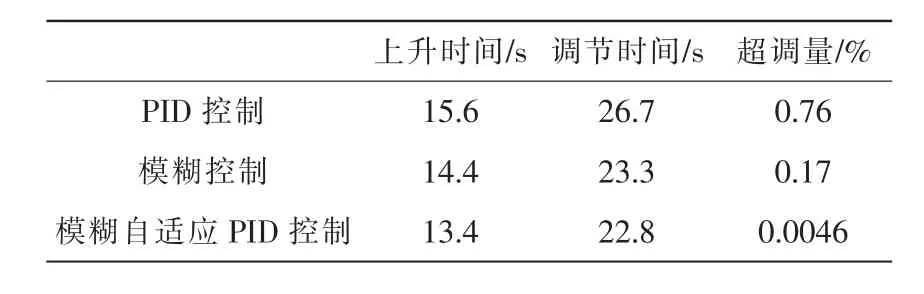
表3 3種控制方法特性參數表Tab.3 Characteristic parameter table of three control methods
3.3 抗干擾性分析
為分析3種控制方法的抗干擾性,對3種控制器分別添加一個幅值是10 N的白噪聲干擾,如圖5所示。
從而可以得到3種控制方法在加白噪聲干擾和沒有加白噪聲干擾的對比曲線,如圖6所示。
根據仿真結果得到這3種控制方法在加干擾后的響應特性參數如表4所示。
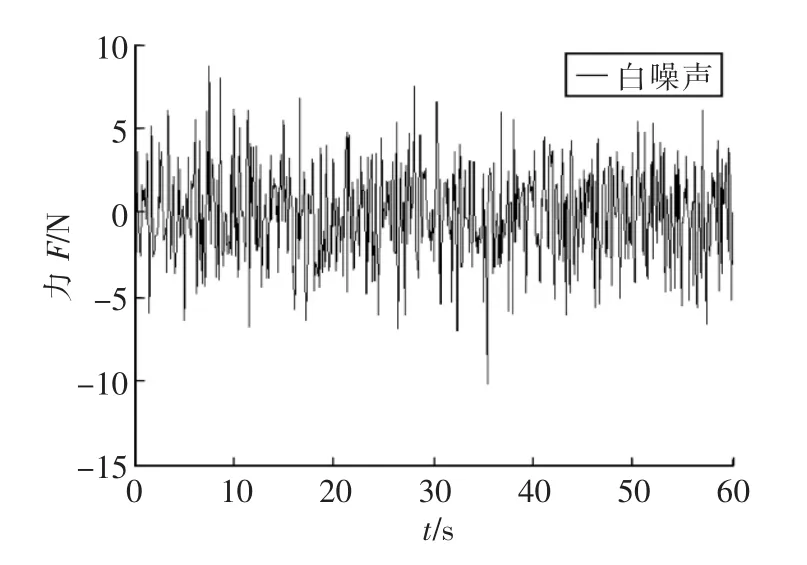
圖5 白噪聲曲線Fig.5 White noise curve
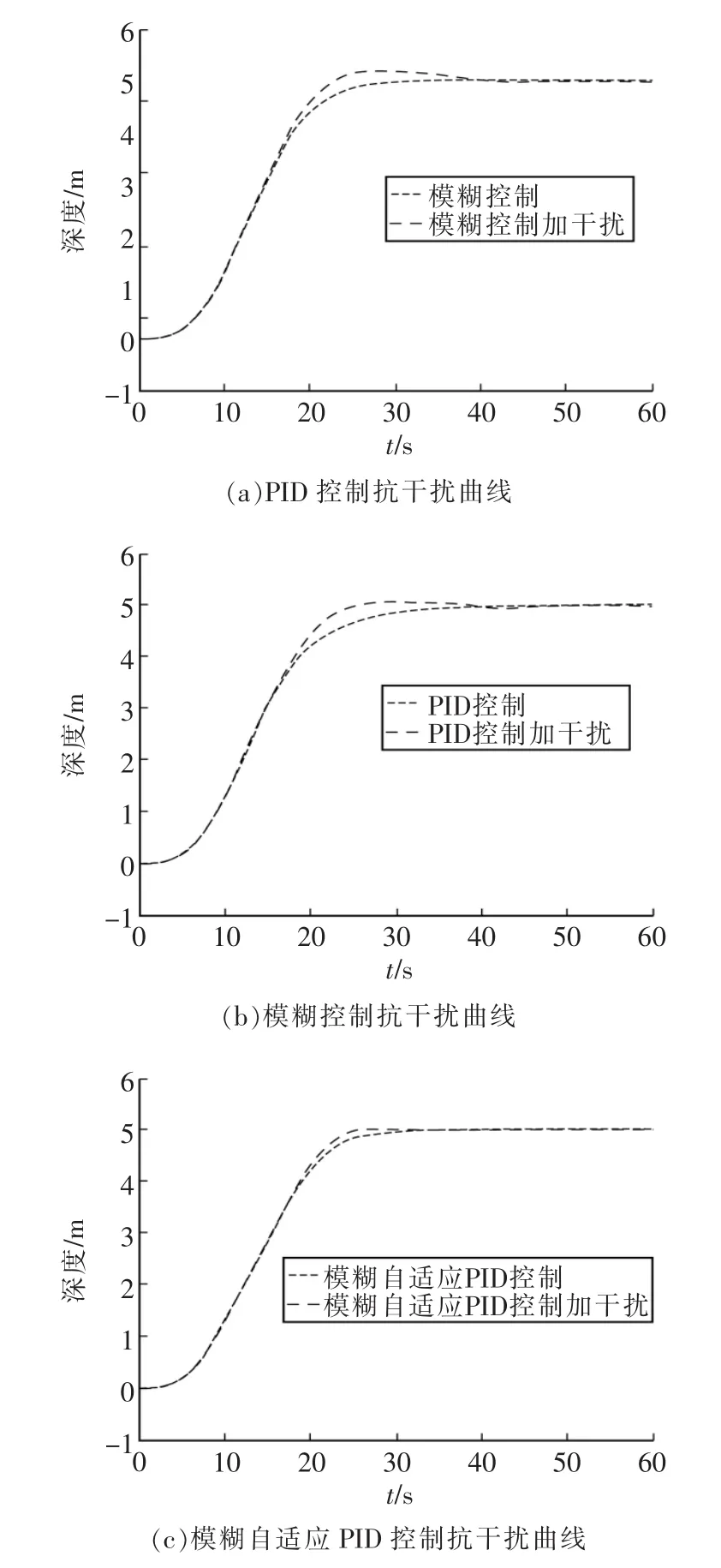
圖6 3種控制方法抗干擾對比曲線Fig.6 Anti-interference contrast curve of three control methods
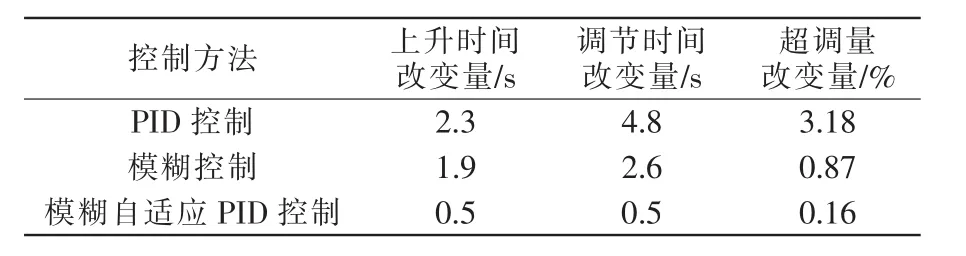
表4 3種控制方法加干擾后特性參數表Tab.4 Characteristic parameter table after adding interference of three control methods
從上升時間、調節時間、超調量、抗干擾性4方面比較可以發現:模糊自適應PID控制是這3種控制方法中效果最優越的,和PID控制相比,模糊自適應PID控制調節時間縮短了14.6%,超調量減小了99%。
4 結語
隨著海水深度的變化,海水的密度也時刻發生變化,由于海水密度變化和AUV的體積變化不一致,導致AUV的浮力發生變化,本文利用南海實驗數據得到浮力與溫度、鹽度、深度變化的關系,從而得到任意深度下的浮力變化量。為研究基于浮力調節的AUV深度控制,根據AUV的水動力學方程和浮力調節裝置的特性參數得到被控AUV的數學模型。設計3種不同的控制方法對AUV進行深度控制研究,利用Matlab對AUV的定身懸浮進行仿真分析,仿真結果表明:模糊自適應PID控制和PID控制相比,調節時間縮短了14.6%,超調量減小了99%。
[1]Zheng Rong,Wang Yu,Wu Jianguo.AUV buoyancy regulating device design and simulation analysis[J].Applied Mechanics and Materials,2014(468):150-157.
[2]武建國,王雨,鄭榮.基于浮力調節的液壓系統動態特性仿真[J].海洋技術學報,2014,33(3):1-6.
[3]Sekhar Tangirala,John Dzielski.A variable buoyancy control system for a large AUV[J].IEEE Journal of Oceanic Engineering,2007,32(4):762-771.
[4]徐玉如,龐永杰,甘永,等.智能水下機器人技術展望[J].智能系統學報,2006,1(1):9-16.
[5]Simon A,Watson,Peter N,.et al.De-coupled vertical controller for micro-autonomous underwater vehicles (uAUVs)[J].International Conference on Mechatronics and Automation Proceedings of the IEEE,2011:561-566.
[6]Hu Bo,Tian Hai,Qian Jiani.A fuzzy-PID method to improve the depth control of AUV[C]//IEEE International Conference on Mechatronics and Automation,2013:1528-1533.
[7]李建朋.水下機器人浮力調節系統及其深度控制技術研究[D].黑龍江:哈爾濱工程大學,2010.
[8]Zhao Wende,Xu Jian’an,Zhang Mingjun.A variable buoyancy controlsystem forlong cruising range AUV[J].International Conference on Computer,Mechatronics Control and Electronic Engineering(CMCE),2010:585-588.
[9]武建國,徐會希,劉健.深海AUV下潛過程浮力變化研究[J].機器人,2014,36(4):455-460.
[10]G N Robots,R Sutton.無人水下航行器進展[M].任志良,張剛譯.北京:電子工業出版社,2009:21-29.
[11]王波.微小型水下機器人運動仿真研究[D].黑龍江:哈爾濱工程大學,2008.
[12]李吉慶.基于模糊PID的某載人模型潛水器的運動控制研究[D].黑龍江:哈爾濱工程大學,2012.
[13]虎恩典,胡時高,劉勇,等.模糊PID在鎂粉壓制系統中的應用[J].控制工程,2014,21(3):361-368.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
