電子膨脹閥的雙模糊控制器算法研究
2015-01-27 06:27:05高正中趙麗娜劉隆吉白星振
自動化與儀表 2015年4期
高正中,趙麗娜 ,劉隆吉,白星振,劉 超
(1.山東科技大學 電氣與自動化工程學院,青島 266590;2.青島港灣職業(yè)技術(shù)學院 電氣工程系,青島 266404)
電子膨脹閥作為制冷機組的節(jié)流控制裝置,起著協(xié)調(diào)壓縮機控制制冷劑進入蒸發(fā)器流量的作用,對其進行有效的控制是制冷機組節(jié)能和穩(wěn)定運行的關(guān)鍵。相對于傳統(tǒng)的節(jié)流裝置熱力膨脹閥或是毛細管,電子膨脹閥調(diào)節(jié)范圍大、反應(yīng)靈敏、調(diào)節(jié)精密、穩(wěn)定可靠。制冷劑在電子膨脹閥中可以雙向流動,避免了熱力膨脹閥只能單方向流動的缺點及毛細管只能小范圍內(nèi)調(diào)節(jié)制冷劑流量的不足[1]。
常用的電子膨脹閥的控制算法是PID控制算法,但PID控制算法需要建立在精確的數(shù)學模型基礎(chǔ)上,然而在很多情況下很難得到蒸發(fā)器精確的數(shù)學模型,故用PID算法時常不能達到理想的控制效果[2]。近年來隨著人工智能算法的不斷發(fā)展,如模糊控制算法[3]、神經(jīng)網(wǎng)絡(luò)算法[4]、自適應(yīng)算法[5]等,出現(xiàn)了多種將人工智能算法與PID算法相結(jié)合的新算法,其中模糊PID控制算法因其控制規(guī)律簡單,人們易于理解,得到了廣泛應(yīng)用。本文在現(xiàn)有的模糊PID控制算法的基礎(chǔ)上提出了一種雙模糊控制器算法,在系統(tǒng)啟動和穩(wěn)定運行的過程中,對電子膨脹閥分別控制,保證了過熱度由系統(tǒng)啟動過程過渡到穩(wěn)定運行過程中的穩(wěn)定,并在Matlab環(huán)境下建模仿真,仿真實驗結(jié)果表明了改進算法在控制電子膨脹閥調(diào)節(jié)過熱度上的優(yōu)勢。
1 電子膨脹閥工作原理
制冷機組由壓縮機、冷凝器、蒸發(fā)器和膨脹閥組成。其工作原理圖如圖1所示。電子膨脹閥是機電一體化新型節(jié)流裝置,分為步進電機型和電磁線圈型2種結(jié)構(gòu)形式,使微機控制制冷劑流量成為了可能[6]。
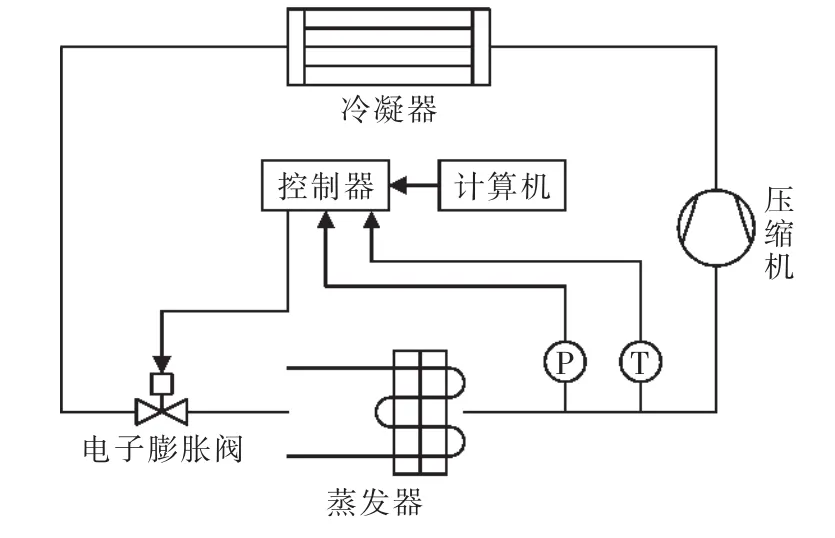
圖1 制冷空調(diào)系統(tǒng)工作原理圖Fig.1 Working schematic diagram of the refrigeration and air conditioning system
本系統(tǒng)采用的電子膨脹閥型號為DZF15,由控制器、執(zhí)行機構(gòu)和傳感器組成。控制器根據(jù)溫度傳感器反饋回來的蒸發(fā)器過熱度大小,來控制步進電機的脈沖數(shù),從而由執(zhí)行機構(gòu)驅(qū)動調(diào)整電子膨脹閥的開度,進入蒸發(fā)器的制冷劑流量被改變,過熱度得到控制。其驅(qū)動原理圖如圖2所示。驅(qū)動芯片采用的是美國TI公司開發(fā)的高壓大電流達林頓晶體管陣列電路ULN2003。該電路具有電流增益高(大于1000),帶負載能力強(輸出電流可達到500 mA),溫度范圍寬(-40℃~85℃),工作電壓高(大于50 V)的特點。

圖2 電子膨脹閥驅(qū)動電路原理圖Fig.2 Driving circuit diagram of the electronic expansion valve
2 電子膨脹閥的常用控制算法
對電子膨脹閥的控制都是以蒸發(fā)器的過熱度為控制目標的。應(yīng)用較多的是PID控制算法,即比例-積分-微分控制。PID控制器是一種線性控制器,因其控制簡單,對系統(tǒng)參數(shù)要求不高,能夠根據(jù)經(jīng)驗和現(xiàn)場調(diào)節(jié)控制參數(shù)而得到廣泛應(yīng)用。因為計算機系統(tǒng)是離散采樣控制系統(tǒng),為了將PID算法應(yīng)用到計算機控制系統(tǒng),常用的是數(shù)字PID控制算法,如式(1)所示:

其中:u(k)為控制作用;e(k)為設(shè)定值與輸出值的偏差;分別為比例、積分、微分系數(shù)。比例、積分、微分系數(shù)大小的選擇對于判定一個PID控制器性能好壞是非常重要的,然而電子膨脹閥的控制系統(tǒng)存在非線性特性、過熱度反應(yīng)滯后、擾動作用強及系統(tǒng)參數(shù)相互耦合的特點,使得PID控制參數(shù)的選擇變得困難。
隨著人工智能的不斷發(fā)展,一些新算法不斷涌現(xiàn),如自適應(yīng)算法、模糊控制算法、神經(jīng)網(wǎng)絡(luò),其中模糊控制算法因其控制原理簡單、控制性能好,尤其適應(yīng)于非線性系統(tǒng)的控制而得到大量研究。模糊控制最重要的特征是反映人們的經(jīng)驗以及人們的常識推理規(guī)則,該算法不需要知道被控對象精確的數(shù)學模型便可根據(jù)模糊推理對系統(tǒng)被控參數(shù)進行調(diào)節(jié),達到人們想要的效果[7]。模糊控制算法的原理圖如圖3所示,分為模糊化、模糊推理和反模糊化3部分構(gòu)成。模糊化過程將輸入基本論域的精確量轉(zhuǎn)化為模糊論域的離散量,并根據(jù)隸屬度函數(shù)和模糊語言將精確量轉(zhuǎn)化為模糊量;經(jīng)過模糊推理,即根據(jù)if-then語言規(guī)則,生成控制作用的模糊量;該模糊量經(jīng)過反模糊化生成精確的控制量作用于被控對象。

圖3 模糊控制器原理圖Fig.3 Schematic diagram of fuzzy control
模糊控制實質(zhì)是非線性的PD控制,不存在積分環(huán)節(jié),對具有慣性特性的被動對象,易在平衡點處出現(xiàn)震蕩現(xiàn)象或存在穩(wěn)態(tài)誤差。鑒于PID控制魯棒性強、結(jié)構(gòu)簡單、可靠性高的特點,將模糊控制算法應(yīng)用于PID算法中的新算法應(yīng)運而生[8]。對于本控制系統(tǒng),控制原理圖如圖4所示。該算法是一種自適應(yīng)控制算法,通過建立過熱度偏差及偏差變化率與PID比例、積分、微分參數(shù)之間的模糊關(guān)系,在系統(tǒng)運行過程中,根據(jù)過熱度偏差及過熱度偏差變化率,經(jīng)過模糊控制器得到參數(shù)修正量Δkp、Δki、Δkd,與原來的PID參數(shù)疊加,在線修正PID參數(shù),可以滿足不同時刻過熱度偏差及變化率對控制器參數(shù)的不同要求,從而使整個系統(tǒng)具有良好的動、靜態(tài)特性。

圖4 模糊自適應(yīng)控制算法原理圖Fig.4 Schematic diagram of fuzzy adaptive control algorithm
3 電子膨脹閥的雙模糊控制器算法
對于電子膨脹閥的控制,大量的研究都集中在系統(tǒng)穩(wěn)定工作過程中電子膨脹閥的控制,很少有對啟動過程中電子膨脹閥的控制算法研究。制冷機組的性能特性在啟動過程和穩(wěn)定運行過程是明顯不同的。研究表明用常規(guī)的控制算法在啟動過程對電子膨脹閥進行控制,容易導致啟動過程過熱度劇烈振蕩[9]。
本文對電子膨脹閥的控制分為2個階段,即制冷系統(tǒng)啟動階段和穩(wěn)定工作階段。在系統(tǒng)啟動和穩(wěn)定工作過程分別使用模糊控制器A和B來控制電子膨脹閥,且穩(wěn)定階段使用自適應(yīng)模糊PID控制算法。控制算法流程圖如圖5所示。

圖5 系統(tǒng)控制流程圖Fig.5 Flow chart of the system
3.1 系統(tǒng)啟動過程電子膨脹閥的控制
啟動過程中過熱度不僅與電子膨脹閥的開度有關(guān),還取決于系統(tǒng)的啟動特性。固定閥開度的控制策略被應(yīng)用在系統(tǒng)啟動過程中。啟動過程中過熱度很大程度上取決于初始蒸發(fā)器中制冷劑的質(zhì)量,而蒸發(fā)器中初始制冷劑的質(zhì)量主要取決于外界環(huán)境溫度Ta,因此選用外界環(huán)境溫度作為啟動過程模糊控制器A的輸入,電子膨脹閥的開度作為輸出量。輸入和輸出的模糊集都選用基于三角形隸屬度函數(shù)的模糊集:{NB、NM、NS、ZO、PS、PM、PB}。模糊控制規(guī)則表如表1所示。

表1 模糊控制器A的模糊控制規(guī)則表Tab.1 Fuzzy control rules of the fuzzy controller A
實驗過程中發(fā)現(xiàn),對于不同的工作條件,系統(tǒng)的啟動時間是不同的,然而水溫的增量T卻基本相同,因此將水溫的增量,即當前水溫與水的初溫的差值作為系統(tǒng)啟動過程結(jié)束的標志。
3.2 系統(tǒng)正常運行過程電子膨脹閥的控制
在系統(tǒng)啟動過程結(jié)束后,壓縮機兩端的壓差基本保持穩(wěn)定,故此時蒸發(fā)器的進出口溫差即過熱度主要取決于電子膨脹閥的開度[10]。在此階段使用的控制算法為自適應(yīng)模糊PID控制算法。選用過熱度偏差e及偏差變化率ec作為模糊控制器B和PID控制器的輸入,Δkp、Δki、Δkd作為模糊控制器 B 的輸出,以此來調(diào)節(jié)PID控制器的參數(shù),最終來調(diào)節(jié)步進電機的脈沖數(shù),達到控制閥開度的目的。模糊控制器的輸入、輸出變量均采用高斯隸屬度函數(shù),模糊集為{NB、NM、NS、ZO、PS、PM、PB}。其中偏差 e的隸屬度函數(shù)如圖6所示。

圖6 偏差e的隸屬度函數(shù)Fig.6 Membership function of the error e
根據(jù)己有控制系統(tǒng)設(shè)計經(jīng)驗以及參數(shù)Kp、Ki、Kd對系統(tǒng)輸出特性的影響,總結(jié)出不同的和對參數(shù) Kp、Ki、Kd的模糊控制規(guī)則[11]。 Δkp、Δki、Δkd的模糊控制規(guī)則如表2~表4所示。

表2 Δkp的模糊控制規(guī)則表Tab.2 Fuzzy control rules of Δkp

表3 Δki的模糊控制規(guī)則表Tab.3 Fuzzy control rules of Δki

表4 Δkd的模糊控制規(guī)則表Tab.4 Fuzzy control rules of Δkd
4 實驗仿真及分析
本系統(tǒng)實驗裝置選用法國泰康CAJ4511A活塞式壓縮機,220 V/50 Hz,名義功率745.7 W,使用工質(zhì)R12,氣缸行程容積32.7 cm3。電子膨脹閥型號為DZF15,DC 12 V供電,4相步進電機驅(qū)動,1~2相勵磁,驅(qū)動頻率小于35 Hz,全閉到全開步數(shù)為320。仿真環(huán)境建立在Matlab仿真環(huán)境下,使用Simulink建模仿真。本文采用模糊PID控制算法,首先建立模糊控制器模型和PID控制器模型,然后將這兩部分封裝打包,得到最終系統(tǒng)的仿真模型,如圖7所示。

圖7 系統(tǒng)仿真模型Fig.7 Simulation model of the system
設(shè)被控對象的數(shù)學模型為

過熱度設(shè)定值為10℃,過熱度偏差論域為{-6,6}、偏差變化率論域為{-1.5,1.5},Δkp、Δki、Δkd的論域分別為{-0.5,0.5}、{-0.01,0.01}、{-0.5,0.5},仿真結(jié)果如圖8、圖9所示。
由仿真結(jié)果可以看出模糊PID控制結(jié)果更好。使用模糊PID控制算法來控制電子膨脹閥,能夠更好地控制過熱度。模糊PID控制下的系統(tǒng)響應(yīng)迅速,能夠很快地達到穩(wěn)態(tài),且超調(diào)小,比PID控制算法效果更理想。

圖8 PID控制仿真結(jié)果Fig.8 Simulation result of the PID control

圖9 模糊PID控制仿真結(jié)果Fig.9 Simulation result of the fuzzy PID control
5 結(jié)語
本文通過分析制冷系統(tǒng)啟動特性和正常運行過程系統(tǒng)特性不同,將對電子膨脹閥的控制分為2個不同過程,采用雙模糊控制算法,且在正常工作過程采用模糊PID控制,仿真結(jié)果表明了該算法在過熱度控制上的優(yōu)勢,能夠使系統(tǒng)很快達到穩(wěn)態(tài),且超調(diào)小,比常規(guī)的PID控制效果更理想,更適合電子膨脹閥的控制。
[1]邵雙全,石文星,李先庭.電子膨脹閥與毛細管在變頻空調(diào)系統(tǒng)中的性能分析[J].流體機械,2001,29(12):41-45.
[2]盧輝斌,張月強,楊雪峰.一種新型PID控制的全數(shù)字鎖相環(huán)的設(shè)計與實現(xiàn)[J].電子技術(shù)應(yīng)用,2010,36(11):56-58.
[3]張國良.模糊控制及其MATLAB應(yīng)用[M].西安:西安交通大學出版社,2002.
[4]喬俊飛,韓紅桂.RBF神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)動態(tài)優(yōu)化設(shè)計[J].自動化學報,2010,36(6):865-872.
[5]姚發(fā)閃,張濤,潘海迪,等.模糊PID和變頻器在導熱油溫度控制中的應(yīng)用[J].自動化與儀表,2013,28(5):36-39.
[6]章曉龍,李征濤,陳憶喆.電子膨脹閥對蒸發(fā)器過熱度穩(wěn)定性的影響[J].流體機械,2014,42(4):72-75.
[7]CAO Jianpeng,Seok-Kwon Jeong,Young-Mi Jung.Fuzzy logic controller design with unevenly-distributed membership function for high performance chamber cooling system[J].J.Cent.South Univ,2014(21):2684-2692.
[8]李元貴,付煥森,曹先鋒.基于模糊 PID算法的船舶錨機控制系統(tǒng)設(shè)計[J].自動化與儀表,2014,29(8):36-40.
[9]陳文勇,陳芝久,朱瑞琪.制冷系統(tǒng)啟動過程電子膨脹閥的控制[J].上海交通大學學報,2002,36(2):210-213.
[10]You Yuwen,Zhang Zhigang,Guo Chunmei.Optimizing approach to varying load of the refrigeration system based on fuzzy logic control[C]//Advanced Materials Research.Switzerland:TTP,2012:6896-6901.
[11]席愛民.模糊控制技術(shù)[M].西安:西安電子科技大學出版社,2008.
