電液舵機系統的建模及模型驗證研究
2015-02-18 03:03:41陳萬強李祥陽
重慶理工大學學報(自然科學) 2015年12期
王 博,陳萬強,李祥陽
(西安航空學院, 西安 710089)
電液舵機系統的建模及模型驗證研究
王 博,陳萬強,李祥陽
(西安航空學院, 西安 710089)
電液伺服舵機系統是一套典型的非線性、參數不確定、有負載干擾的復雜系統,在建模的過程中,不但要考慮非線性的存在和負載不同模型的差異性,更要考慮到對模型簡化的可行性,故理論建立的數學模型往往和實際差異較大,單純依靠理論建模仿真并不能給工程人員提供可信的參考依據。為了驗證模型的正確性,研究了電液舵機系統的理論建模過程,并對建立的模型進行驗證實驗,確定建立的數學模型。通過對比階躍及掃頻曲線的方法,對模型的動態、靜態、頻響特性進行對比分析,從而確定模型建立的正確性。對理論建模進行實驗驗證是必要的,不但可以指導理論建模,還可以為控制算法的計算機仿真帶來有力的支持,并進而為電液舵機系統仿真平臺的搭建提供基礎。
舵機系統;Matlab;建模;電液伺服閥
舵機是飛行控制系統中的執行機構,其核心是一套電液伺服系統。該系統是按照放大器傳來的控制信號,以一定的輸出速度和輸出力推動飛機的舵面,從而控制飛機飛行姿態的一套復雜裝置。現代飛行器對性能的要求越來越高,操縱特性及氣動力特性變得更為復雜,同時也對舵機的研制提出了更高的要求。然而,電液伺服舵機系統是一套典型的非線性、參數不確定、有負載干擾的復雜系統,在建模的過程中不但要考慮非線性的存在和負載不同導致的模型差異性,更要考慮對模型簡化的可行性[1-8]。因為在對系統的分析和校正的過程中,如果模型不準確,將直接影響分析和校正的結果。要想得到一個高性能的電液舵機系統,驗證模型的正確性很重要。通過物理仿真得到階躍與掃頻輸出曲線,進而可得到相應的特性參數,與仿真曲線得到的特性參數相比較,就可以確定模型正確與否[2,9-13]。對理論建模進行實驗驗證是必要的,這不但可以指導理論建模,還可以為控制算法的計算機仿真帶來有力的支持,進而為電液舵機系統仿真平臺的搭建提供基礎。
1 舵機系統原理
在電傳操縱模態下,舵機通過位移傳感器把作動器活塞的位移作為反饋信號,以此來控制電液伺服閥的運動。在該操縱模式下,舵機采用電液伺服閥控制作動器,再由作動器的輸出力來推動舵面轉動。系統構成一個閉合回路,是一個典型的電液伺服系統,其實質是通過電信號控制伺服閥把液壓源的液壓功率轉換為作動器的機械功率輸出。
2 舵機系統數學模型
2.1 電液伺服閥數學模型
從實用角度出發,一般可將復雜的電液伺服閥傳遞函數簡化為二階振蕩環節[20]。因此,將本系統中的電液伺服閥傳遞函數描述為
(1)
其中:xv(s)為電液伺服閥的閥芯位移的拉氏變換;i(s)為電液伺服閥輸入電流變化的拉氏變換;ωsv為電液伺服閥的固有頻率;ζsv為電液伺服閥的阻尼比;Ksv為電液伺服閥的流量增益。
2.2 閥控缸環節數學模型
閥控缸環節數學模型見圖1。
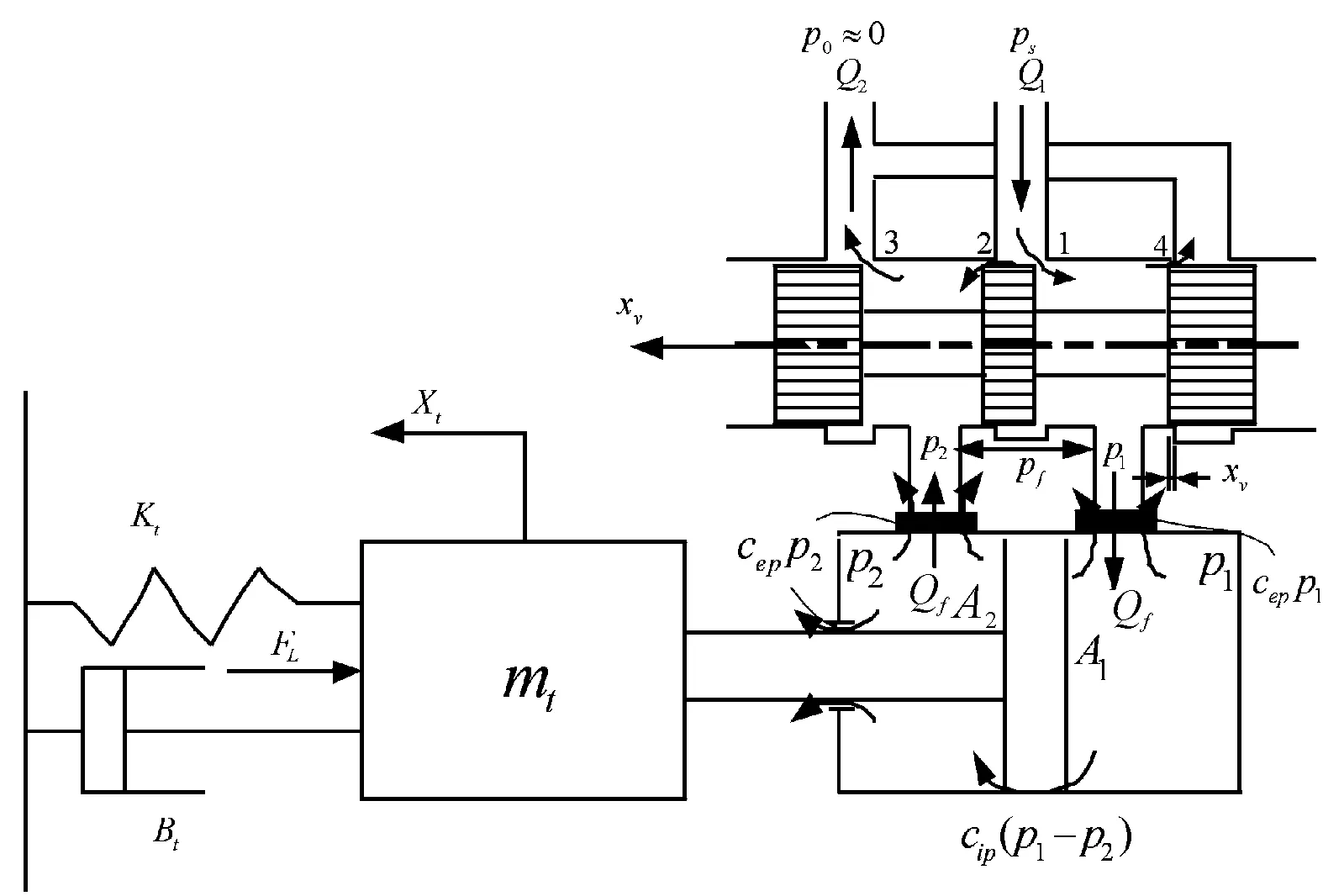
圖1 閥控缸環節數學模型
1) 液壓放大原件方程:
(2)
2) 作動器流量方程:
(3)
3) 液壓缸的負載力平衡方程:
(4)
將式(2)~(4)合并同類項表示為
(5)
閥控缸環節完整的方塊圖如圖2所示。

圖2 閥控缸環節完整的方塊圖
當負載力只有慣性力時,系統相當于空載。由前述可知:滑閥輸出流量方程和作動器輸出流量相同,負載力平衡方程變為
(6)
式中:mt為負載和活塞折算到活塞上的總質量;Bt為作動器負載的阻尼系數;K為作動器負載的彈性系數。
對式(6)進行拉氏變換得
pfAt=mtxts2
(7)
同理,可得閥控缸環節空載方塊圖,如圖3所示。

圖3 閥控缸環節空載方塊圖
3 仿真研究
根據系統的理化特性建立系統的數學模型,僅考慮有彈性負載的情況。在此基礎上,依據設計要求確定仿真參數,如表1所示。
通過仿真得到電傳模式下的系統帶寬為6.5 Hz。 令輸入信號的頻率為6.5 Hz,得到系統的輸入/輸出位移曲線,如圖4所示。
從圖4可以看出:輸入信號的峰峰值為20 mm,輸出信號的峰峰值為14.2 mm。此時的輸出相角滯后為45.1°。
時域分析:設定δ1=0.014 mm,在系統輸入5 mm 的階躍指令,得到如圖5所示的比例控制下舵機的階躍響應曲線。
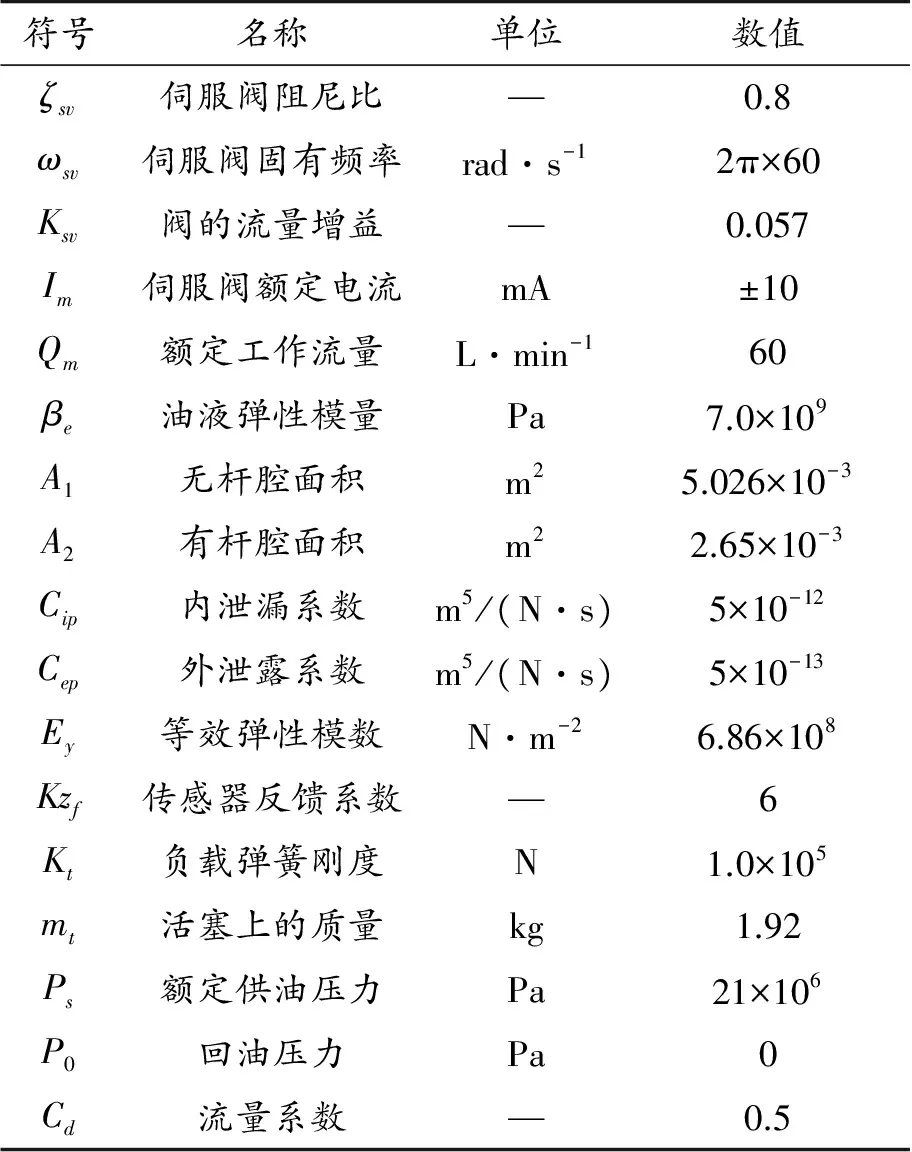
表1 系統仿真參數
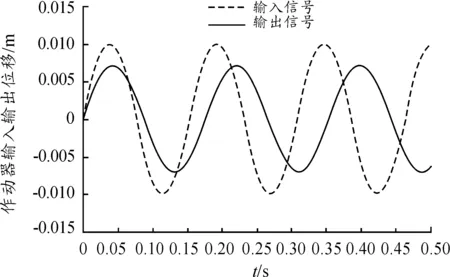
圖4 系統的輸入/輸出位移曲線

圖5 比例控制下舵機的階躍響應曲線
從圖5可以清楚看出:雖然有死區存在,但給出的指令大小已遠遠超過死區的大小,所以在很短的時間內就可越過死區產生輸出位移,即在0時刻就會產生位移。從圖中還可以看到:系統有一個0.083 mm的穩態誤差,該穩態誤差即由死區產生。數據上升時間為0.049 8 s、調節時間為0.092 3 s,超調量為0。
4 物理實驗對比
實驗系統由實驗臺架、舵機實物、舵機控制器、測試系統、加載系統和能源系統組成。系統的組成示意圖如圖6所示。控制系統采用舵機專用控制器,其內部自帶比例控制,為了與仿真作對比,比例系數仍取0.03,信號發生器為該控制器提供實驗所需的電氣指令信號。測試系統包括1臺數據存儲分析系統和1臺外置16通道信號調理器及不同功能的傳感器。實驗只涉及線位移傳感器。
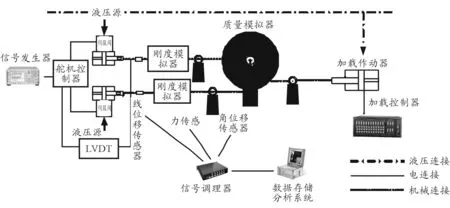
圖6 電傳操縱模態實驗系統組成示意圖
數據存儲分析系統選用奧地利DEWETRON公司的DEWE-2601,它是一臺高性能的便攜式數據采集分析系統。DEWETRON公司生產的專業測控處理機加上信號調理模塊可以與各種傳感器直接連接,實現從傳感器到數據采集系統的方便連接,使電纜長度大為減少。所有程控模塊的檢測均由測試軟件(DEWESOFT)自動完成,只需輸入傳感器的靈敏度和測試量程就可進行測試。測試軟件界面如圖7所示。
測試前檢查油箱的油量、各個控制閥的狀態是否為實驗狀態、管道是否有滲油漏油,確保各部分功能系統正常工作、板卡跳線設置正確等。對電傳操縱舵機動態性能的測試主要有階躍響應測試、頻率響應測試。

圖7 DEWESoft自定義測試界面
使用函數信號發生器對控制器發出5 mm階躍控制指令,記錄作動器活塞的位移曲線,如圖8所示。

圖8 實驗記錄系統階躍響應曲線
從實驗結果可以看出:上升時間為0.048 6 s、調節時間為0.095 1 s,穩態誤差為0.061 4 mm,沒有超調量。實驗結果與仿真結果基本吻合。
當系統帶寬為6.5 Hz時,為了與仿真進行對比,使用與仿真相同的輸入參數,即峰峰值為20 mm,頻率為6.5 Hz的正弦信號。使用函數信號發生器對系統發出掃頻信號,記錄作動器活塞的位移。實驗結果如圖9所示。

圖9 實驗記錄系統掃頻信號
從圖9可以看出:輸入信號的峰峰值為20 mm,輸出信號的峰峰值為14.1 mm,輸出位移/輸入位移=0.705<0.707,表明結果基本符合要求。此時,在圖上讀出輸出位移的相角滯后為45.8°,與仿真結果相符。
5 結束語
實驗數據和仿真數據基本一致,驗證了系統模型的建立方法是正確的。該模型可作為后續工作的仿真平臺基礎,在此基礎上可進行其他校正環節的研究。如此,不但可大大提高工作效率,更主要的是解決了仿真結果與實際結果的偏差問題,通過仿真就可基本確定參數的大致范圍,為最終調試提供依據,減輕了現場調試的盲目感。
[1] 吳曉男,陳勇,戴洪德.液壓舵機模型仿真設計與研究[J].儀表技術,2013(6):45-48.
[2] 黃忠霖.控制系統MATLAB計算機及仿真[M].北京:國防工業出版社,2001:201-204.
[3] 劉國平,齊大偉,胡瑢華,等.比例方向閥性能測試系統設計[J].現代制造工程,2013(1):28-30,41.
[4] 王鴻鈺.壓縮機性能測試系統[J].電子質量,2002(3):18-21.
[5] 馬麗,張秀彬,趙麗欣.基于虛擬儀器的機載模塊性能測試系統[J].航空電子技術,2013(4):18-23.
[6] 崔勝民,李建如.基于虛擬儀器的汽車制動性能測試系統[J].汽車科技,2004(5):36-37.
[7] 成可南.計算機系統在自動化儀器儀表中的應用[J].自動化與儀器儀表,2014(7):30-33.
[8] 徐波.自動化儀器儀表行業的現狀及發展趨勢[J].科技創新與應用,2014(13):31-34.
[9] 李洪人.液壓控制系統[M].北京:國防工業出版社,1981:96-120.
[10]李培滋,王占林.飛機液壓傳動與伺服控制(下)[M].北京:國防工業出版社,1980:1-10.
[11]李艷軍.飛機液壓傳動與控制[M].北京:科學出版社,2009:46-47.
[12]李玉琳.液壓組件與系統設計[M].北京:北京航空航天大學出版社,1991:30-40.
[13]梅里特H E著.液壓控制系統[M].陳燕慶,譯.北京:科學出版社,1976:11-20.
[14]李葉妮, 林少芬,陳水宣.基于LabVIEW的液壓伺服測控系統開發[J].重慶理工大學學報(自然科學版),2012(8):31-35.
[15]范子榮,滕青芳 . 液壓伺服控制系統的設計[J]. 計算機仿真,2014(7):183-186.
[16]肖前進,賈宏光,章家保,等. 電動舵機伺服系統非線性辨識及補償[J].光學精密工程,2013(8):2038-2047.
[17]崔業兵,鞠玉濤,周長省,等. 一種高帶寬四舵翼電動舵機的可行性研究[J].電機與控制學報,2012(12):87-93.
[18]韓松杉,焦宗夏,尚耀星,等.基于舵機指令前饋的電液負載模擬器同步控制[J].北京航空航天大學學報,2015(1):124-132.
(責任編輯 楊黎麗)
Modeling and Electro-Hydraulic Steering System Model Validation Studies
WANG Bo,CHEN Wan-qiang,LI Xiang-yang
(Xi’an Aeronautical University, Xi’an 710089, China)
Electro-hydraulic servo steering system is system that has a typical nonlinear, parameter uncertainty and has a complex system load disturbance. In the modeling process, we not only have to consider the difference between existence and non-linear loads of different models, but also has to take the feasibility of the simplified model into account, thus there are often great differences between the mathematical model established based on theory and the actual situation, because relying on theoretical modeling simulation can not provide reliable reference for engineering personnel. In order to verify the accuracy of the modeling, theory model process of electro-hydraulic servo system was researched, and the model was verified to determine the established mathematical model. By comparing the step and sweep frequency curve method, the dynamic, static, and frequency response characteristics of model were analyzed to determine the accuracy of the establishment of the model. The theoretical modeling test is necessary, which can not only guide theory modeling, but also bring strong support for the control algorithm of computer simulation, and provide the basis for the construction of the electrohydraulic servo system simulation platform.
actuator system; Matlab; modeling; electro-hydraulic servo valve
2015-07-10 基金項目:2013年西安市科技計劃項目(CXY1349(5));陜西省自然科學基礎研究計劃項目(2014JM2-5069)
王博(1984—),男,陜西人,碩士研究生,主要從事液壓伺服控制研究。
王博,陳萬強,李祥陽.電液舵機系統的建模及模型驗證研究[J].重慶理工大學學報(自然科學版),2015(12):133-137.
format:WANG Bo,CHEN Wan-qiang,LI Xiang-yang.Modeling and Electro-Hydraulic Steering System Model Validation Studies[J].Journal of Chongqing University of Technology(Natural Science),2015(12):133-137.
10.3969/j.issn.1674-8425(z).2015.12.022
TM571.6+4
A
1674-8425(2015)12-0133-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52