基于遺傳算法的錐齒輪優化設計
2015-02-18 01:29:28李吉祥
新課程(下) 2015年7期
張 慧 李吉祥 徐 博
(太原重型機械集團有限公司)
錐齒輪傳動轉速范圍較大、承載能力較強,因此被廣泛應用于各種機械傳動設備。對錐齒輪進行優化設計,減小其質量和體積,延長使用壽命在其設計過程中非常重要。但是按照錐齒輪設計的標準系列方法不能夠很好地解決目前的問題。由于錐齒輪傳動的優化設計是混合了離散變量的非線性優化問題,遺傳算法(簡稱GA)借鑒生物進化過程自然選擇與遺傳機制,使問題的解不斷改進的一種智能搜索算法,具有廣泛的適應性,尤其適合處理復雜參數和非線性優化問題。因此,遺傳算可以應用于錐齒輪傳動優化設計中。
一、錐齒輪優化設計模型的建立
1.建立目標函數
由于錐齒輪的體積大小直接影響到加工和裝配,為了使結構更加緊湊,減小齒輪重量,節約生產材料和成本,因此選用錐齒輪體積之和作為設計的目標函數
式中:da1——小錐齒輪齒頂圓直徑;
da1——大錐齒輪齒頂圓直徑;
βm——齒寬中心螺旋角;
R——錐齒輪外錐距;
ΨR——齒寬系數;
Rm——錐齒輪的平均錐距。
2.確定設計變量
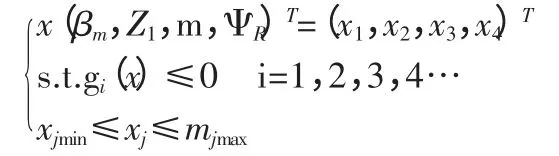
錐齒輪傳動的獨立變化參數有小錐齒輪齒數Z,大端模數m,齒寬系數ΨR,中點螺旋角βm。故取設計變量為:x=(βm,Z1,m,ΨR)T=(x1,x2,x3,x4)T
3.建立約束條件
(1)齒面接觸強度約束
計算接觸應力σH與許用接觸應力[σH]之間的關系:
(2)齒根彎曲強度約束
齒輪的計算彎曲應力σF與許用彎曲應力[σF]之間的關系

m——錐齒輪的模數;u——齒數比;
K——齒輪安全系數;YFS——錐齒輪齒形系數;
(3)設計變量的邊界條件
①齒輪中點螺旋角的上、下限約束條件
15°≤βm≤40°
②小錐齒輪的齒數約束條件
13≤Z1≤Z1max
③齒輪模數約束條件
2≤m≤8
④齒寬系數約束條件
0.25≤ΨR≤0.3
由以上可得錐齒傳動的數學優化模型為:
(4)適應度函數的構造
外點懲罰函數法是常用的一種懲罰函數方法,其基本的原理是將約束優化問題轉化成為等價參數目標函數,即式子中:用G[gm(x)]=來定義全域,當迭代點在可行域內時,有gm(x)≥0懲罰函數不受懲罰,否則gm(x)<0,懲罰函數受懲罰。為在優化的過程中隨著迭代次數K 的增大而在不斷變化的參數,即懲罰因子。可見,外點懲罰函數就是將懲罰函數在可行域的外部逐漸逼近要求約束問題的最優化解的過程,按照該方法構造適應度函數。
v(x)=f(x)+p(x)
式中:x——染色體;
f(x)——目標函數;
p(x)——懲罰項。
本文錐齒輪優化目標為體積和最小,相應的適應度函數為:
當x 可行時p(x)=0
當x 不可行時p(x)=-r1[g(x)]2-r2[g2(x)]2<0
取錐齒輪齒面的接觸懲罰因子r1=1,彎曲條件的懲罰因子r2=0.5
二、程序與仿真結果
1.錐齒輪遺傳優化算法框圖
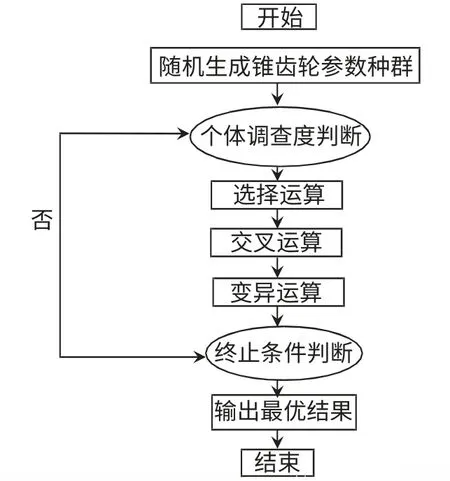
圖1 錐齒輪遺傳算法程序框圖Fig.1 Bevel gear genetic algorithm block diagram.
2.優化設計適應度M-文件
定義適應度函數M-文件
function[sol,y]=GA_mp(sol,options)
%設計變量;中點螺旋角x(1);小錐齒輪齒數z=x(2);大端模數m=x(3);齒寬系數x(4)。
x(1)=sol(1);x(2)=sol(2);x(3)=sol(3);x(4)=sol(4);
%目標函數
u=3;%齒數比
ha=1;%齒高系數
d1=x(2)*x(3)/2;%小錐齒輪分度圓直徑
d2=u*d1;%大錐齒輪分度圓直徑
R=d1*sqrt(1+u^2);%外錐距
Rm=R*(1-0.5*x(4));%平均錐距
da1=(x(2)+2*ha)*x(3);%小錐齒輪齒頂圓直徑
da2=(x(1)*u+2*ha)*x(3);%大錐齒輪齒頂圓直徑
f=pi/4*x(4)*R*(Rm/R)^2*(da1+da2)^2/cos(x(1)*pi/360);%目標函數體積
%以某種型號錐齒輪減速器為例,設置初始種群
bounds=[15 45;13 17;2 10;0.25 0.3];
initPop=initializega(50,bounds,'A_mp',[]);
K=1.5;T1=45.1;u=3;
3.優化計算結果
****錐齒輪傳動遺傳算法最優解*****
中點螺旋角: β=18.7282
小齒輪齒數:z1=18.7282
齒輪的模數:m=2.0000 mm
齒寬系數: ψ=0.2500
錐齒輪體積:V=164768.5135 mm^3
經過運算確定小齒輪的齒數:z1=19
模數:m=2
齒形系數:ψ=0.25
****湊整解性能約束值****
齒面接觸強度約束函數值
g1y=595.7808 Mpa
齒根彎曲強度約束函數值
g2y=248.7019 Mpa
此時在滿足承載能力的條件下,最小體積為V=164768.5135 mm^3,充分節省材料成本。
4.適應度函數線圖
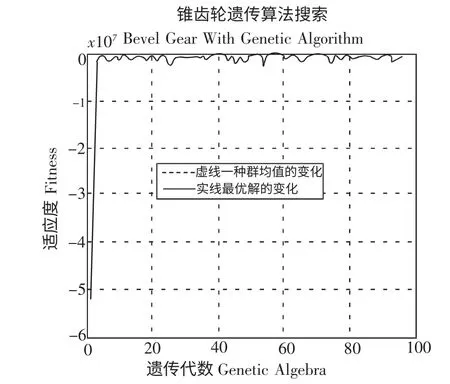
圖2 錐齒輪遺傳算法優化過程圖Fig.2 Bevel Gear genetic algorithm optimization process diagram.
本文建立了錐齒輪傳動過程中多維非線性約束的數學優化模型,通過懲罰函數構造適應度函數,利用Matlab 中的遺傳算法工具箱編程計算得到了錐齒輪傳動的體積和最優解,同時繪制出遺傳過程中個代適應度平均值線圖,更直觀地描繪出遺傳算法的搜索過程,從而為錐齒輪傳動減速器的設計過程中節約金屬材料,縮短研發周期,降低生產成本提供了理論參考和借鑒。
[1]郭仁生.機械工程設計分析和Matlab 應用[M].機械工業出版社,2012-03:97-305.
[2]羅潘,梁尚明,蔣立茂,等.基于多目標遺傳算法的弧齒錐齒輪多學科優化設計[J].機械設計與制造,2012(08):6-8.
[3]梁華琪.弧齒錐齒輪傳動的多目標優化設計[J].現代機械,2005(01):18-19.
[4]劉光磊,樊紅衛,谷霽紅.一種弧齒錐齒輪傳動性能優化方法[J].航空學報,2010,31(08):1680-1687.
[5]杜海霞.基于遺傳算法的錐齒輪減速器優化設計[J].機械制造與研究,2011,40(01):28-29.
[6]李文濤.弧齒錐齒輪優化設計的數學模型[J].機械管理開發,2009,24(01):7-8.
[7]杜海霞.錐齒輪減速器的遺傳算法優化設計[J].現代制造技術與裝備,2010(04):22-23.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
小讀者(2020年2期)2020-03-12 10:34:06
藝術啟蒙(2018年7期)2018-08-23 09:14:18
趣味(語文)(2018年1期)2018-05-25 03:09:58
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
學苑創造·A版(2015年6期)2015-07-01 09:00:12
