基于vissim軟件的行人過街交叉口協調控制方案比選與仿真
2015-02-18 01:28:46廖為東左忠義
大連交通大學學報 2015年5期
關鍵詞:信號
廖為東,左忠義
(大連交通大學 交通運輸工程學院,遼寧 大連 116028)*
0 引言
目前,在我國的多數城市,行人過街信號控制交叉口作為城市的節點,是城市交通事故突發的主要集中地.如何盡可能一直綠燈通行,從而提高交通效率,減少安全隱患,減少等待時間,一直是擺在城市交通研究者們眼前的難題.在大連,我們經常看到:關鍵信號交叉口的信號周期達到了130 s以上,個別超過180 s,行人等待過街時間超過50 s甚至70 s.管理部門片面的追求長周期和增加車道數,從而導致行人等待時間超過了其可忍受時間,行人違章過街進一步增加[1].如何提出并進行協調控制方案的比選與仿真,是本文研究的重點.最近幾年,國內學者在干路交叉口協調控制方面做了比較深入的研究,比如,盧凱和徐閩建[2]等通過對協調控制系統相位優化設計,提出了相位差模型;王俊剛[3]等以綠波帶寬度最大作為目標函數,以時差作為決策變量,提出了干線協調模型;從國內外的研究現狀來看,大多數專家學者在協調控制理論方面,幾乎忽略了行人過街信號交叉口,都是優先考慮干路交叉口[4].
基于當前研究的缺陷和當前理論的空白,本文通過提出了三種行人過街信號與交叉口信號聯動協調的控制方案并進行了模擬仿真.
1 路段平面行人過街路口特性分析
1.1 行人過街行為交通特性分析
行人過街速度是指行人通過人行橫道的速度,是行人過街的一個重要參數,對研究行人設施的設計,過街信號的控制,通行能力,服務水平等都起著重要的作用;跟行人過街的等待忍受時間也密切相關.調查大連交通大學校門口不同年齡組別的行人平均過街速度如表1所示.

表1 交通大學正門口行人速度調查 m/s
盧守峰,王紅茹等[5]通過調查指出,行人過街最大等待忍受時間在40~50 s范圍內;基于此點,本文在這里選取50 s作為行人過街最大等待忍受時間.
1.2 機動車流交通特性分析
機動車交通特性分析,本文主要對相位差和延誤進行分析,首先有必要對上下游交叉口的現狀進行分析.經過調查,大連交通大學正門行人過街距離上游黃河路/西南路交叉口的距離為253 m,距離下游黃河路/西山街交叉口的距離為350 m.黃河路為雙向6車道.交通大學正門行人過街為按鈕式感應信號控制行人過街交叉口.
(1)相位差:是指相鄰兩信號的綠燈起點的時間之差.為了使得車輛通過協調信號控制系統時,能連續通過盡可能多的綠燈,必須是的相鄰信號間的相位差同其行程時間相適應,所以相位差是信號協調控制系統的關鍵參數.要想取得相位差,首先要知道車速.
車速是綠波帶設計重要因素.在進行綠波協調控制時候,假設車速選取不當,方案控制效果會受到影響,甚至導致方案控制失敗.對單個車速來說可能千差萬別,但是對大量的整體數據來說,肯定是呈現規律性和整體性.通過路段高峰時段車流和行程速度進行調查,由調查結果統計得出的路段車速頻率分布見圖1,取設計車速為頻率最大速度的均值,出現頻率最高的速度組中值是32.25 km/h.

圖1 黃河路段車速頻率分布圖
(2)延誤
韋伯斯特提出了下列計算車輛平均延誤的公式:

式中:C為最佳周期長度(s);λ為綠信比;q為交通流量.
2 行人過街信號與交叉口信號協調控制方案比選
車輛經常碰到紅燈,時停時開,造成行車不暢通,也增加了環境污染.進行相位協調控制,即減少在各個交叉口的停車時間,為路段過街行人提供可穿越空檔,進而保證行人安全,減少因為沖突而導致的交通事故,減少行人和車流的等待時間,確保行人和車流順暢通行,減少延誤.其中選擇是否合適的協調控制方案會直接影響到協調控制的效果,下一步我們將會提出三種方案并且進行比選.
2.1 綠波帶設計思想的交叉口信號協調控制
為了使干道路上的車輛能夠暢通,人們把一條干道上一批相鄰的交通信號燈連接起來,加以協調控制,使車輛獲得不停頓的通行權,就是我們所說的綠波控制.當相鄰兩個信號燈的距離不是很長時,易于為廣大駕駛員所采納,而且它操作簡便,相對經濟,所以是一種比較常見的道路交通控制方法.為使主干路道路交通通行能力最大,在制定干線道路信號配時方案時遵循原則之一是使帶寬最大.并且它設置主要交叉口原則,優先考慮主要交叉口,在考慮次要交叉口.
這種做法的原始思路是:希望使車輛再通過第一個交叉口后,按照一定的速度行駛,到達下游交叉口希望不再遇到紅燈.但是在實際情況中,由于各個車輛在路段上行駛時速度不一,而且隨時有波動,交叉口有左右轉彎機動車進出等因素干擾,所以要想一路綠燈在現實生活中是很難碰到的,但可以沿路少碰到幾次紅燈,從而減少車輛的停車次數和延誤.
2.2 交叉口獨立信號協調控制
(a)“Φ式人行橫道獨立信號”與上下游交叉口信號燈協調控制
由于機動車流具有潮汐現象,所以早高峰和晚高峰,機動車流量是不同的.基于這點,我們有必要對行人過街兩端的信號燈進行不同配時的獨立控制,這樣可以確保分隔帶兩邊都是綠燈通行,使過街更加方便,減少了機動車流的停車率和行人的延誤時間,也方便了廣大的行人,減少了違章過街.
當采用Φ式獨立控制進行二次過街時,分隔帶兩邊的信號配時不同,所以計算出的行人延誤也不一樣.Φ式獨立控制的行人總延誤相當于將左右兩邊的時間延誤與在安全島上等待時間之和.
延誤計算公式為:
dp=d1+d2+d等待
式中:d1為左邊過街階段的行人延誤(s);d2為右邊過街階段的行人延誤(s);d等待為安全島上等待時間.
(b)“Z式人行橫道獨立信號”與上下游交叉口信號燈協調控制
對(a)方案,也有缺陷,因為是平行的,而且兩邊的信號都是獨立的,所以當左邊是紅燈,右邊是綠燈的時候,行人看到右邊的信號燈和右邊的行人開始過街,容易有習慣思維,容易下意識的啟動過街,直接造成了違章,導致機動車流緊急剎車或者交通事故.基于這個原因,我們有必要把左邊和右邊的過街設置成有一定距離,形成錯位式.使用Z式過街還有個好處就是可以減少等待忍受時間,因為行人在中間錯位安全島中步行需要一定的時間.一定程度上間接的減少了行人過街的總延誤.這種方案的效果圖如圖2所示.

圖2 Z式行人過街獨立信號效果圖
延誤計算:
dp=d1+d2+d等待-d移動
式中:d1為左邊行人過街階段的行人延誤(s);d2為右邊行人過街階段的行人延誤(s);d等待為島上等待時間;d移動為行人在安全島上步行的時間.
綜合上面三種方法,我們可以進行大致判斷,當行人都是中青年,而且步速較快,我們可以采用綠波帶的控制方法,當車流量較大,或者行人都是兒童或者老年人的時候,我們應該設置成Z式人行橫道獨立信號和Φ式人行橫道獨立信號.二次過街旨在增強行人過街安全,而綠波帶的控制方法由于信號燈設置的比較少,可以減少總延誤,所以是目前比較常用的方法,具有潮汐現象時候可以更多的考慮Z式人行橫道獨立信號.
3 模擬仿真
行人到達路口后,首先要判斷這是否是信號控制交叉路口,如果不是,則觀察路段交通流情況隨時準備過街;如果是信號控制交叉口,則看是否是綠燈,如果是,則進行過街行為,如果不是,則是否打算違法過街,如果是,則在判斷交通流情況后違章過街,如果不違章,則進行等待,等待綠燈時間在通過路段交叉口.所以行人過街的心理和等待忍受時間具有很大關系.一般情況下,道路行人交通過街主要包括以下三個部分:到達路口,判斷路口紅燈還是綠燈,步行過街等,具體過程如圖3所示.

圖3 行人過街過程演示圖
利用VISSIM軟件進行交通上下游方案控制模擬仿真,其過程包括建立路段路徑、設定仿真參數、進行仿真模擬和導出仿真結果等步驟.建立仿真環境的過程,就是將能夠表征實際路網環境和運行狀態的結構和參數,繪制或輸入到計算機軟件當中的過程,包括上下游交叉口路段的幾何布局、信號燈配時參數、各個路段流量等.最后進行仿真結果導出.
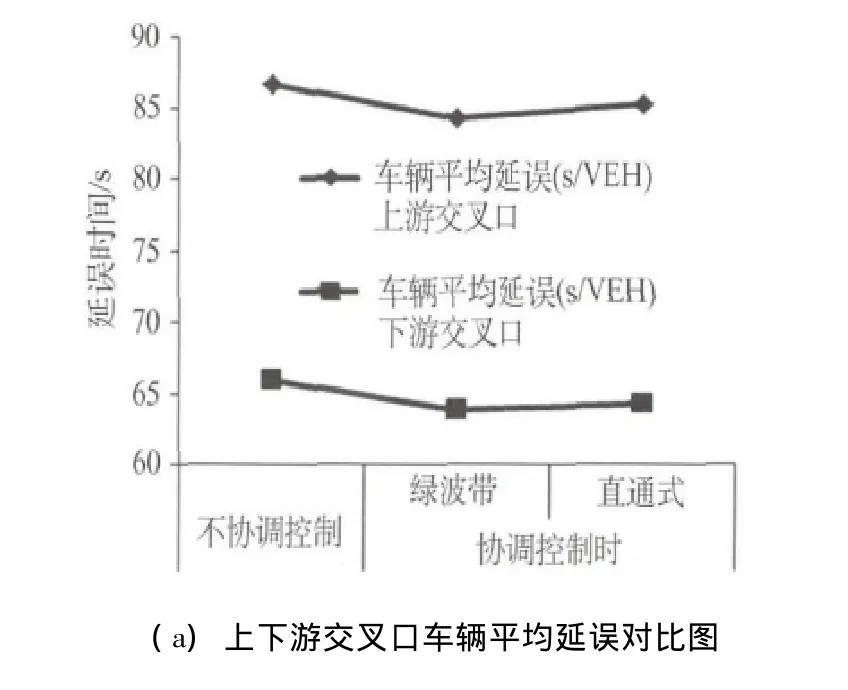

圖4 模擬仿真結果對比圖
根據vissim仿真軟件的輸出文件,得出在不同情況下,上下游交叉口車輛平均延誤,停車率,行人平均延誤和行程時間方案對比如圖4所示.
由圖4可以看出,以黃河路大連交通大學正門口行人過街為例,當設置人行過街信號進行協調時,上下游交叉口處的停車率和車輛平均延誤都比不協調控制的時候小;當路段進行協調控制的時候,綠波帶協調控制方案,對交通大學正門口來說是最好的.
4 結論
在城市道路網絡中,交叉口相距較近,如何方便的進行聯動控制一直是交通管理和研究學者關注的課題,有較強的實際應用價值.本文在對路段行人特性和機動車流特性進行充分調查分析后,提出了綠波帶,Φ式人行橫道獨立信號,Z式人行橫道獨立信號三種協調方案,并在此基礎上提出了各自的適應范圍.以大連交通大學正門口行人過街協調控制為例,對以上三種協調控制方案運用vissim軟件進行了模擬仿真,仿真結果表明,綠波帶協調控制方案是最適合該路口,停車率和延誤是最低的.
[1]李娜.路段行人過街信號與交叉口信號協調控制研究[D].南京:東南大學,2004.
[2]盧凱,徐建閩.干道協調控制相位差模型及其優化方法[J].中國公路學報,2008(1):87-92.
[3]王俊剛,于泉,高穎,等.變帶速干線協調控制模型研究[J].公路交通科技,2005(4):111-114.
[4]鄭長江.行人過街信號與交叉口信號聯動控制方法研究[D].南京:東南大學,2006.
[5]盧守峰,王紅茹,劉喜敏.基于生存分析法的行人過街最大等待時間研究[J].交通信息與安全,2009(5):69-71.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
