基于HyperMesh的磁懸浮儲能飛輪模態(tài)分析
2015-02-18 12:01:02查生凱唐景春
機械工程師 2015年7期
查生凱, 唐景春
(合肥工業(yè)大學(xué) 機械與汽車工程學(xué)院,合肥 230009)
0 引 言
飛輪儲能作為一種先進的物理儲能技術(shù)已經(jīng)部分應(yīng)用于航空航天、電動汽車、電磁彈射、通信、醫(yī)療、電力等領(lǐng)域[1]。飛輪的儲能量與轉(zhuǎn)子轉(zhuǎn)動慣量和飛輪轉(zhuǎn)速的平方成正比,因此提高飛輪儲能密度有兩種途徑:一是增加飛輪轉(zhuǎn)子的輪緣質(zhì)量以增大轉(zhuǎn)動慣量,二是提高飛輪轉(zhuǎn)速。前者主要用于沖壓機械,由于其體積大不便推廣使用。后者應(yīng)用領(lǐng)域廣闊,但受到三個方面的制約:其一是飛輪在高速連續(xù)運轉(zhuǎn)時,軸承由于摩擦導(dǎo)致磨損、發(fā)熱、升溫、失效,潤滑油變質(zhì),限制了飛輪轉(zhuǎn)速的提高;其二是要確保輪緣材料在離心力作用下不會因強度不足發(fā)生失效;其三是高速旋轉(zhuǎn)時,飛輪受到的空氣阻力和軸承的摩擦力矩會顯著增加,使得儲能效率大大減低。近年來磁懸浮軸承技術(shù)與復(fù)合材料技術(shù)的發(fā)展正在逐步解決上述難題。
美國、瑞士等工業(yè)發(fā)達國家長期從事電磁軸承儲能飛輪的研究與開發(fā),同時進行了磁軸承相關(guān)技術(shù)研究[2]。文獻[3]分析了多層復(fù)合材料轉(zhuǎn)子的應(yīng)力分布與自由模態(tài)。文獻[4]根據(jù)平面應(yīng)力假設(shè)分析得到復(fù)合材料儲能飛輪的最大徑向應(yīng)力位置。
本文針對一種磁懸浮儲能飛輪,利用HyperMesh軟件對每個零件網(wǎng)格劃分,并由零件裝配生成磁懸浮儲能飛輪的有限元模型。利用彈簧單元springs模擬磁軸承。利用Rasioss求解器求解系統(tǒng)模態(tài)頻率與振型。根據(jù)分析結(jié)果可以有效預(yù)估系統(tǒng)的振動特性,為結(jié)構(gòu)優(yōu)化與性能改進提供理論依據(jù)。
1 儲能飛輪系統(tǒng)的結(jié)構(gòu)設(shè)計
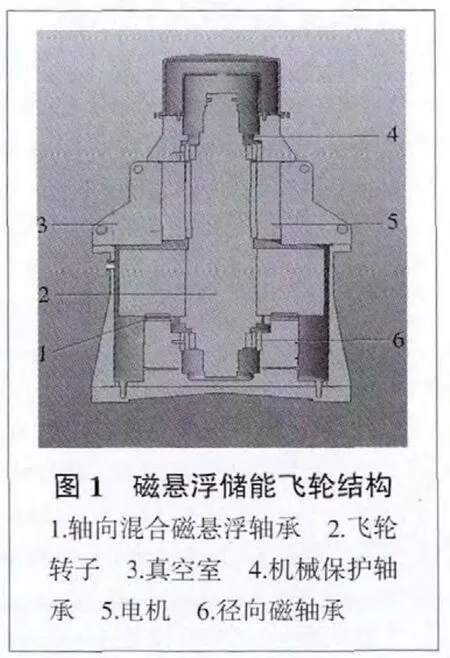
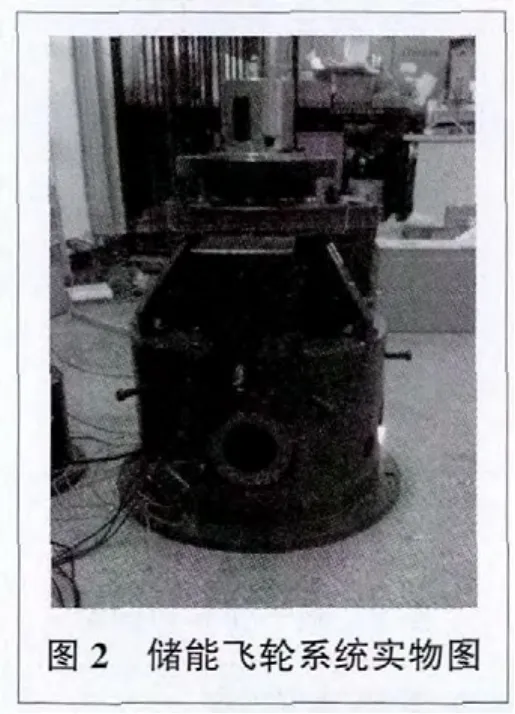
根據(jù)儲能量的設(shè)計要求,利用三維設(shè)計軟件Pro/E建模和運動仿真,運用ANSYS軟件對主要部件進行力學(xué)分析,完成磁懸浮儲能飛輪樣機的初步結(jié)構(gòu)設(shè)計工作,其結(jié)構(gòu)如圖1所示,主要有飛輪轉(zhuǎn)子、電機、機械保護軸承、徑向磁軸承、軸向混合磁軸承、真空室(維持內(nèi)部真空,減小空氣阻力)等關(guān)鍵部件組成。圖2為儲能飛輪系統(tǒng)實物圖。
2 模態(tài)分析原理
工程中的彈性結(jié)構(gòu)可以離散化為有限個質(zhì)量元件、彈性元件和阻尼元件組成的N自由度線性系統(tǒng),其動力學(xué)微分方程為[5]
其中:[M]為結(jié)構(gòu)質(zhì)量矩陣;[C]為結(jié)構(gòu)阻尼矩陣;[ K]為剛度矩陣;{F}為激勵向量;{X}、{ X˙}、{ X¨}分別為各離散質(zhì)量的N維位移、速度、加速度向量。
對上式作傅立葉變換,可得

式中:{ X( ω)} 為位移{ X} 的傅立葉變換;{ F( ω)} 為激勵{F}的傅立葉變換;[H(ω)]為系統(tǒng)頻率響應(yīng)函數(shù)矩陣。
[H(ω)]中元素H1p(ω)的含義是:當(dāng)其它點上激勵為零時,1點的響應(yīng)譜與p點激勵譜之比,即

通過系統(tǒng)測試獲得矩陣中元素,得到頻響函數(shù)矩陣,即可獲得系統(tǒng)的全部動力學(xué)特性。
在結(jié)構(gòu)阻尼、小阻尼或比例阻尼情況下,模態(tài)參數(shù)與頻響函數(shù)之間的關(guān)系為

式中:{ φ}i為第 i階振型;ki為第 i階模態(tài)剛度;mi為第 i階模態(tài)質(zhì)量;ci為第i階模態(tài)阻尼。
運用模態(tài)參數(shù)識別理論進行模態(tài)參數(shù)識別,可獲得各階模態(tài)參數(shù)。
3 建立有限元模型與施加邊界條件
3.1 零件有限元建模
將儲能飛輪簡化為底座、下支撐、中間圓筒、電機定子、上支撐、真空罩、轉(zhuǎn)子7大部分,利用三維設(shè)計軟件分別建立實體模型,在有限元軟件HyperMesh環(huán)境下劃分網(wǎng)格。轉(zhuǎn)子的有限元模型如圖3所示。
儲能飛輪有限元模型共包含97 620個節(jié)點,208 773個單元。根據(jù)零件的實際結(jié)構(gòu),底座、下支撐與真空罩采用一階六面體單元Hex8單元劃分網(wǎng)格,其他零件采用一階四面體單元tetra4單元劃分網(wǎng)格。
3.2 儲能飛輪零件結(jié)合部建模
定子是由多個零件通過螺栓聯(lián)接組成的,轉(zhuǎn)子由磁軸承支撐。這些零件間關(guān)聯(lián)方式的模擬是否合理直接影響計算結(jié)果的準(zhǔn)確性。
3.2.1 螺栓聯(lián)接處理
螺栓聯(lián)接作為常用聯(lián)接在機械結(jié)構(gòu)中被廣泛使用,本系統(tǒng)共有36處螺栓聯(lián)接。采用connectors中的bolt單元模擬螺栓聯(lián)接,其主要思想是用2組剛性單元RBE2分別聯(lián)接2個被聯(lián)接件的內(nèi)孔節(jié)點,然后再用梁單元聯(lián)接2組RBE2單元的中心節(jié)點。
3.2.2 接觸處理
為了真實地反映系統(tǒng)的動態(tài)特性,不應(yīng)將組成定子的各零件作一體化處理,應(yīng)在零件間的接觸面上定義摩擦接觸單元。接觸力與位移之間的關(guān)系如圖4所示。
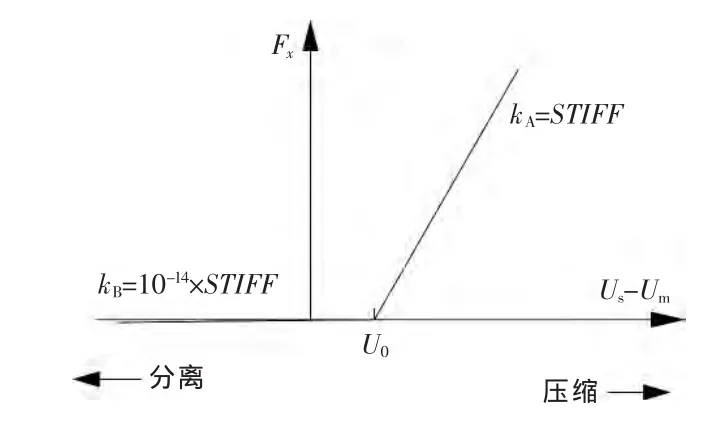
圖4 接觸力與位移之間的關(guān)系
圖4中,縱坐標(biāo)FX為接觸力,橫坐標(biāo)Us-Um為兩接觸面的相對位移量,U0為初始間隙量,STIFF為接觸面相對剛度。STIFF的值由接觸面周圍單元的剛度決定。由圖4可知:當(dāng)兩接觸面由初始位置壓縮時接觸剛度為定值,接觸力與壓縮位移量成正比;當(dāng)兩接觸面由初始位置分離時,為了避免出現(xiàn)奇異值取接觸面的剛度為10-14×STIFF。
接觸面間的摩擦力與滑動距離之間的關(guān)系如圖5所示。
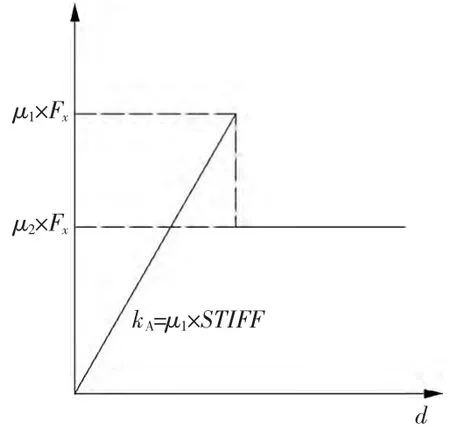
圖5 摩擦力與滑動距離之間的關(guān)系
圖5中,橫坐標(biāo)d為兩接觸面相對滑動距離,F(xiàn)為接觸面摩擦力,μ1為靜摩擦因數(shù),μ2為動摩擦因數(shù),F(xiàn)x為法向接觸力。由圖5可知:隨著滑動距離d的增大接觸面摩擦力F逐漸增加到靜摩擦力 μ1×Fx,當(dāng)滑動距離 d 繼續(xù)增加時,F(xiàn) 為定值 μ2×Fx。
HyperMesh11.0定義了三種標(biāo)準(zhǔn)接觸類型:SLIDE(滑動),STICK(黏結(jié)),F(xiàn)REEZE( 固聯(lián))[6]。 在分析過程中,軟件會自動計算這三種接觸的接觸剛度與摩擦因數(shù)。根據(jù)各零件的實際接觸情況,本文選擇的接觸類型是SLIDE。
3.2.3 磁軸承支撐處理
上下徑向磁軸承固定件通過螺釘固定于上下支撐,上下徑向磁軸承轉(zhuǎn)動件固定于轉(zhuǎn)軸上的軸套,軸向磁軸承轉(zhuǎn)動件嵌裝于飛輪體的下端面,軸向磁軸承固定件嵌裝于下支撐的上端面。為了簡化模型,采用了一體化處理。磁軸承定轉(zhuǎn)子之間通過彈簧阻尼單元springs聯(lián)接起來。磁軸承的剛度為[7]

式中:p為軸承的平均周長;J1、J2為磁化強度;μ0為真空磁導(dǎo)率;R為間隙量;S1、S2為磁軸承的橫截面積。
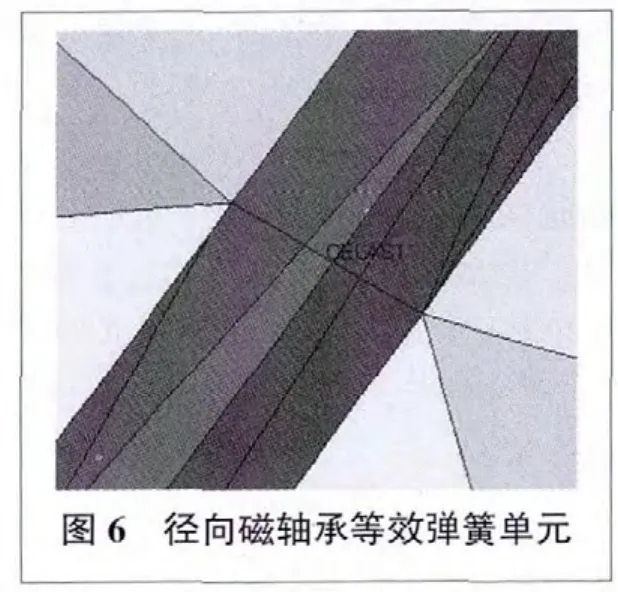
根據(jù)磁軸承的結(jié)構(gòu)特點,將徑向磁軸承簡化為8根彈簧[8], 其 剛 度 為2.458×106N/m,軸向磁軸承簡化為8根彈簧,其剛度為0.162×106N/m。其中徑向磁軸承等效的彈簧單元聯(lián)接如圖6所示。
3.3 施加邊界條件
系統(tǒng)由4個水平調(diào)節(jié)螺栓固定支撐,給有限元模型施加如下邊界條件:用剛性單元RBE2聯(lián)接螺栓內(nèi)孔與中心節(jié)點,約束4個中心節(jié)點的6個自由度。其中一個約束如圖7所示。
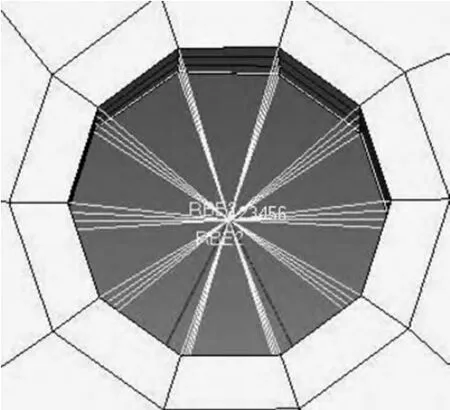
圖7 邊界條件
4 模擬計算與結(jié)果分析
磁懸浮儲能飛輪的模態(tài)分析在HyperMesh環(huán)境下,采用Radioss求解器求解模態(tài)。Radioss提供了兩種蘭索斯法(Lanczos) 用于提取特征值與特征向量。如果EIGRL卡片中沒有定義上限且待求的特征值階數(shù)小于50,系統(tǒng)會自動選擇速度較快的蘭索斯法[9]。模態(tài)分析提取了前6階模態(tài),其固有頻率與模態(tài)振型如表1所述,部分振型如圖8~圖10所示。模態(tài)振型是結(jié)構(gòu)在特定頻率的振動激勵作用下產(chǎn)生的變形形式,為了使結(jié)構(gòu)的變形形式更加直觀,選用5倍比例因子將其放大。
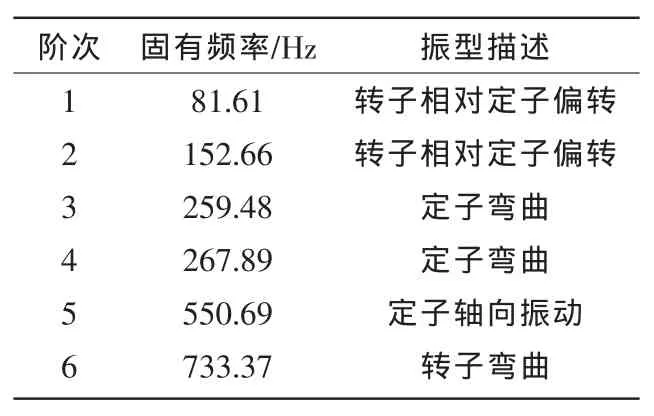
表1 磁懸浮儲能飛輪模態(tài)頻率與振型
計算分析結(jié)果表明,磁懸浮儲能飛輪在低頻段的振動模態(tài)主要為轉(zhuǎn)子的剛性偏轉(zhuǎn),在高頻段的振動模態(tài)主要為定子彎曲與軸向上下振動、轉(zhuǎn)子彎曲振動。從表1可以看出,第1階與第2階的模態(tài)振型都是轉(zhuǎn)子相對定子偏轉(zhuǎn),但是偏轉(zhuǎn)方向不同,第3階與第4階模態(tài)頻率接近且振型都是定子彎曲,但是彎曲的方向不同。低頻振動對系統(tǒng)的控制精度影響較大,應(yīng)采用模態(tài)控制方法加以控制。系統(tǒng)在高頻段的模態(tài)為定子的彎曲振動,可通過結(jié)構(gòu)優(yōu)化設(shè)計加以抑制。系統(tǒng)的更高階模態(tài)對系統(tǒng)的影響較小,可以忽略不計。操作實驗機時,應(yīng)盡量避開系統(tǒng)的固有頻率,以避免共振對系統(tǒng)性能的影響。
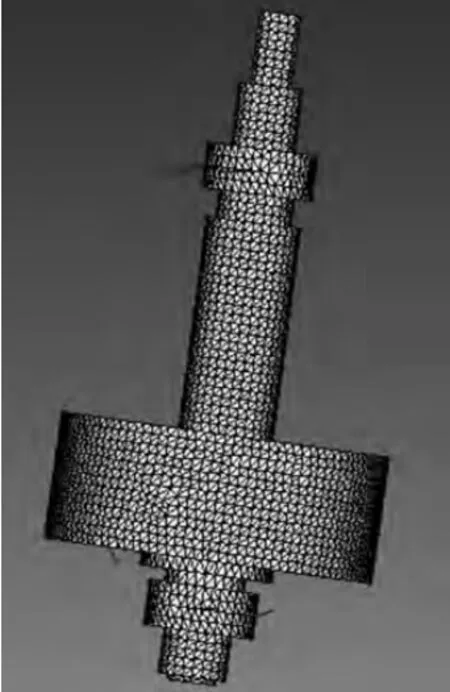
圖8 轉(zhuǎn)子第2階振型

圖9 轉(zhuǎn)子第6階振型
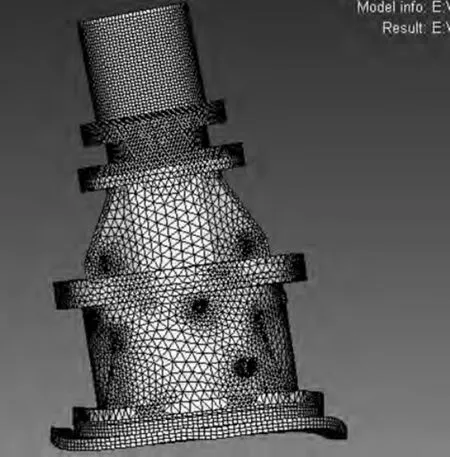
圖10 定子第4階振型
5 實驗?zāi)B(tài)分析
按照實驗?zāi)B(tài)分析原理,首先根據(jù)儲能飛輪的實際結(jié)構(gòu),確定激勵點與測試點,建立測量模型,在激勵點施加激勵并測量振動響應(yīng),將時間響應(yīng)轉(zhuǎn)換到頻域或直接利用時間響應(yīng)進行模態(tài)參數(shù)估計。一般來說,一個系統(tǒng)的動態(tài)響應(yīng)是它的若干模態(tài)振型的疊加。在一個給定的頻帶范圍內(nèi)只有一個模態(tài)是重要的,其模態(tài)參數(shù)可以單獨確定。采用單自由度法對系統(tǒng)進行峰值檢測與模態(tài)阻尼計算[10]。識別出來的固有頻率與模態(tài)阻尼如表2所述。
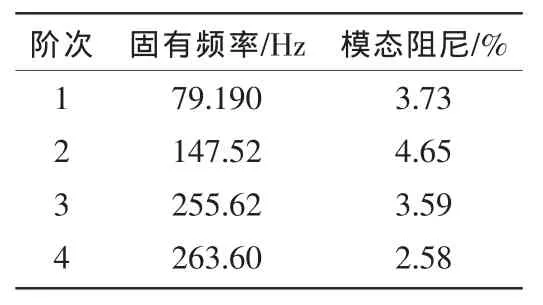
表2 實驗?zāi)B(tài)頻率與模態(tài)阻尼
6結(jié) 論
1)本文運用HyperMesh軟件對各個零件分別建模,然后利用聯(lián)接單元bolt、springs裝配。相比定子一體化建模方式,模型真實合理,結(jié)果更加準(zhǔn)確可靠。
2)由模態(tài)分析得到了系統(tǒng)前6階模態(tài)的固有頻率與振型,找出系統(tǒng)設(shè)計的薄弱環(huán)節(jié)(磁軸承安裝位置),這些部位最容易因振動而產(chǎn)生碰撞破環(huán)。
3)對比表1與表2的前4階模態(tài)頻率,可以看出實驗?zāi)B(tài)頻率值比有限元分析的結(jié)果略低一點,這是因為采用有限元方法進行模態(tài)分析時往往忽略系統(tǒng)阻尼的影響,而實際系統(tǒng)中存在阻尼,導(dǎo)致實驗?zāi)B(tài)頻率較有限元分析結(jié)果低。
[1] 湯雙清.飛輪儲能技術(shù)及應(yīng)用[M].武漢:華中科技大學(xué)出版社,2007:1-18.
[2] Schweitzer G,Maslen E H.Magnetic bearings∶Theory,Design,and Application to Rotating Machinery[M].Berlin:Springerverlag Berlin Heidelberg,2009∶1-195.
[3] 孔繁鑫,黃勤.高能飛輪轉(zhuǎn)子動態(tài)特性及應(yīng)力分析[J].機械設(shè)計與制造,2014(5):28-30.
[4] Wen Shaobo.Analysis of maximum radial stress location of composite energy storage flywheel rotor[J].Archive of Applied Mechanics,2014,84(7)∶1007-1010.
[5] 郭昌進,楊喜,王金麗.基于ANSYSWorkbench的甘蔗葉粉碎機機架模態(tài)分析[J].農(nóng)機化研究,2014(8):23-26.
[6] 王鈺棟,金磊,洪清泉.HyperMesh&HyperView應(yīng)用技巧與高級實例[M].北京:機械工業(yè)出版社,2012:257-408.
[7] Yonnet J P.Permanent Magnet Bearings and Couplings[J].IEEE Transactions on Magnetics,1981,17(1)∶1168-1173.
[8] 小颯工作室.最新經(jīng)典ANSYS及Workbench教程[M].北京:電子工業(yè)出版社,2004:378-395.
[9] 歐賀國,方獻軍,洪清泉.Radioss理論基礎(chǔ)與工程應(yīng)用[M].北京:機械工業(yè)出版社,2013:121-123.
[10] Heylen W,Lammens S,et al.Modal Analysis Theory and Testing[D].Katholieke Universteit Leuven,Departement Werktuigkunde,2006:50-72.
猜你喜歡
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學(xué)學(xué)報(2019年6期)2019-08-13 07:04:32
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(2015年4期)2015-05-07 06:43:35
上海電機學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24