基于特征點的航測影像匹配算法研究
2015-03-01 02:20:52汪豪
安徽農業科學 2015年4期
汪 豪
(東華理工大學測繪工程學院,江西南昌 330013)
?
基于特征點的航測影像匹配算法研究
汪 豪
(東華理工大學測繪工程學院,江西南昌 330013)
在影像匹配算法中,快速有效的匹配算法是航空攝影測量的關鍵。基于特征點提取的影像匹配算法具有精度高、適用性廣的特點,已經逐漸成為影像匹配研究的主流。該研究分別在測試影像及航空影像中對FAST、Harris、SURF 3種快速的經典特征點匹配算法進行分析比較,探討各自的優缺點,為不同應用情況中特征點匹配方法的選取提供借鑒。
影像匹配;特征點提取;航空影像;特征點匹配
影像匹配是通過一定的匹配算法對兩幅或多幅影像之間識別同名點的過程[1]。快速、有效、高精度的影像匹配算法可以為航空攝影測量提供重要的技術支持與保障。由于航空影像成像的自然場景比較復雜,并且容易受成像條件和環境誤差的影響,所以影像之間就存在著多種多樣的成像畸變,這就使得影像匹配始終是一個值得研究的課題。基于特征點的影像匹配定位精確,且匹配后的特征點坐標可以直接用來計算影像之間的空間變換關系等優點,受到了眾多學者的關注和研究,并逐漸在實際工作中得到了廣泛應用。筆者介紹了FAST[2]、Harris[3]、SURF[4]3種快速有效的特征點提取算法的原理,并且對它們匹配算法的提取速度、魯棒性及穩定性進行分析比較。
1 FAST、Harris、SURF 3種算法簡介
1.1 FAST算法FAST算法是于2006年由Edward Rosten 和 Tom Drummond提出的一種借鑒于SUSAN算法[5]的特征點提取算法。應用到灰度圖像中,即判別有足夠多的像素點的灰度值小于該中心點的灰度值。如圖1所示,選取任意像素點p,將其像素值設為Ip,接著設定一個合適的閾值t,以其像素點為中心,半徑等于3的離散化的Bresenham圓周圍的16個像素點。在這16個像素組成的圓上有n個連續的像素點,若它們的像素值比Ip+t大,或Ip-t小,則該點為一個角點。Edward Rosten等在實驗給出的n參考值取12。
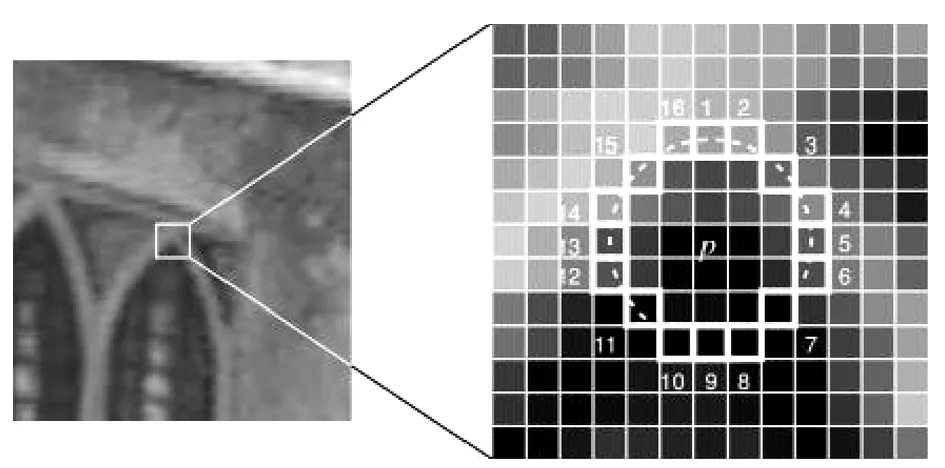
圖1 FAST角點提取示例
1.2 Harris算法Harris算法是于1988年由Chris Harris和Mike Stephens以Moravec算法[6]為基礎拓展出的一種特征點提取算法。以目標像素點(x,y)為中心的二維高斯函數窗口,向任意方向移動(u,v)后計算像素灰度變化,其表達式如下:
E(u,v)=∑x,yG(x,y)[I(x+u,y+v)-I(x,y)]2
(1)
由泰勒公式得到公式(2):
(2)
式中,Ix、Iy為x、y的方向梯度。
矩陣M是目標像素點的自相關矩陣,它的2個特征值分別為λ1和λ2,這2個特征值與矩陣M的主曲率成正比。當2個特征值均較小時,表明目標點附近區域為平坦區域;特征值一大一小時,表明特征點位于邊緣上;只有當2個特征值均比較大時,沿任意方向的移動均將導致灰度的劇烈變化。由此而得到Harris的角點響應函數R:
R=det(M)-k[trace(m)]2
(3)
式中,det(M)=λ1λ2表示矩陣M的行列式;trace(M)=λ1+λ2表示矩陣的跡;k的取值范圍是0.04~0.06。當目標像素點的R值大于給定的閾值時,該點像素點即可認為是角點。實驗中,系數k的經驗值一般取0.04,R值越大,表明該點越是角點。R值的大小與相應的點的特征的關系如圖2。
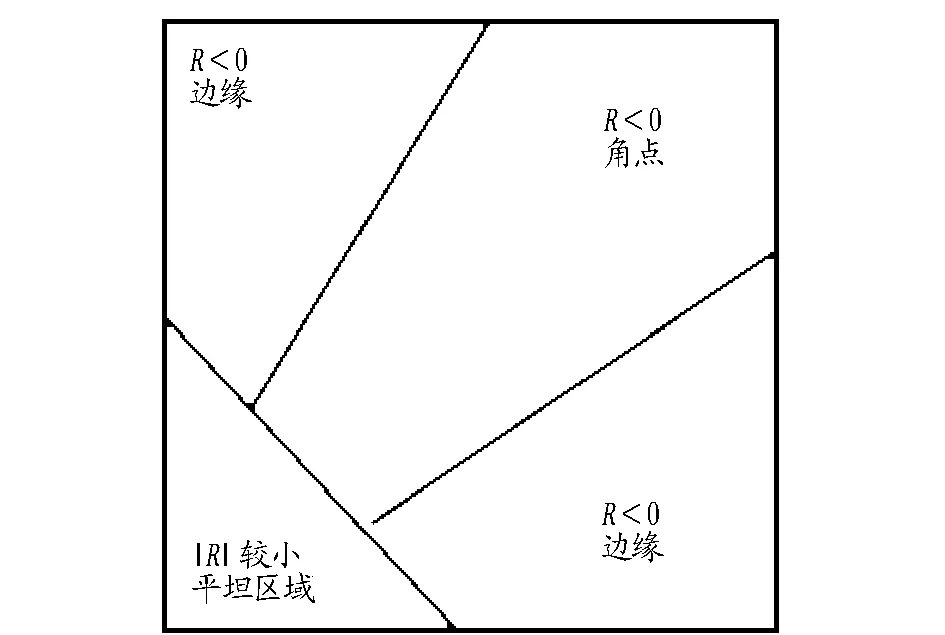
圖2 Harris角點響應準則
1.3 SURF算法SURF算法是于2006年由Herbert Bay首次發表于ECCV,2008年正式發表在《Computer Vision and Image Understanding》,該算法是SIFT算法[7-8]的加速版。在圖像處理中,尺度空間被通常被表述為一個圖像金字塔,向下降采樣一般用高斯金字塔。SIFT算法中用差分高斯金字塔DOG代替高斯金字塔LOG來提高算法性能,SURF算法中則是使用方框濾波近似代替高斯濾波,然后使用積分圖像加速卷積,提高運算速度,以較小的精度損失獲得更快的特征點檢測速度。
Hessian矩陣是SURF算法的核心,首先圖中某個像素點p(x,y)的Hessian矩陣為:
(4)
經過高斯濾波后獲得與尺度無關的Hessian矩陣為:
(5)
以方框濾波近似代替高斯二階導數用積分圖像加速卷積后的近似表達式為:
detH=Dxx×Dyy-(0.9×Dxy)2
(6)
式中,Dxx、Dxy、Dyy是圖像中p點與方向濾波的卷積,0.9是作者給的一個經驗值。通過該方法為圖像中每個像素計算出其H行列式的決定值,并用這個值來判別特征點。
通過非極大抑制,對尺度空間中的每一個像素(每一階的首尾層除外),與該像素相鄰空間范圍內進行比較(即8個像素以及它相鄰尺度上、下層的9個相鄰像素點,共26個),得到局部極大值和極小值點獲得特征點。然后進行曲面擬合,獲得特征點的坐標(x,y)以及尺度σ,便可以根據鄰域信息確定興趣點的主方向以及特征向量。
以每一個特征點為圓心,在6σ為半徑的圓形區域,統算x和y方向的上的小波響應,并以特征點為中心對這些響應用高斯函數進行加權處理。然后通過一個大小為π/3的扇形區域的滑動窗口計算窗口內x和y方向的響應求和,轉動搜尋整個圓形區域,取長度最長的矢量方向作為該特征點的主方向。
接著以一個特征點為中心,首先將坐標軸旋轉到主方向,選取邊長為20σ正方形區域,將該區域劃分成4×4的子區域,對每個子區域內,計算25個空間像素點的小波響應,以特征點為中心進行高斯函數加權處理,以加強魯棒性,統計每一個子區域的x、y方向上的Haar小波響應dx、dy的和∑dx、∑dy,及其絕對值的和∑|dx|、∑|dy|。因此,在每一個子區域內有一個4維向量V4=(dx,dy,∑dx,∑dy),則每個特征點區域有4×4×4=64維的特征描述向量,對其歸一化從而獲得具有旋轉、尺度和光照不變性的特征向量。
2 3種匹配算法比較
為了能更加客觀的比較出3種算法的性能,該研究進行了測試圖檢測實驗及實景圖匹配實驗,測試圖為分別進行旋轉、平移、噪點、亮度變化的積木圖,實景圖匹配方法為最鄰近距離比值法。
該實驗仿真環境為MATLAB2012b+OpenCV編程運行,計算機配置為Intel Core i5-3230M 2.60GHz,4.00 GB RAM。操作系統為Microsoft Windows7專業版。
積木測試圖檢測實驗結果見表1。
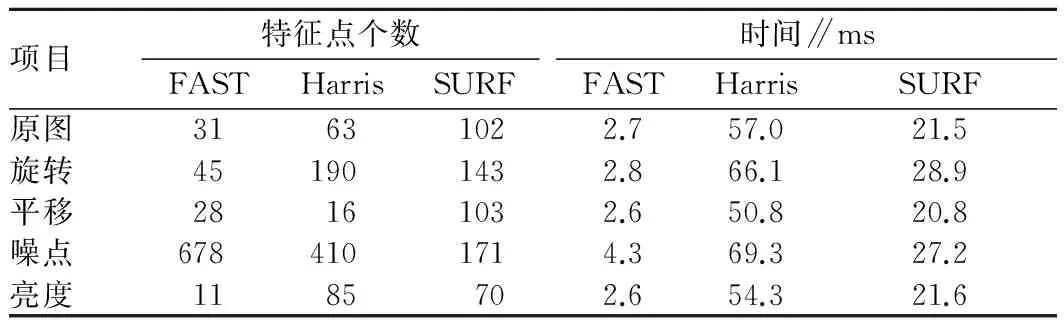
表1 積木圖檢測實驗的統計結果
從表1可以看出,在特征點檢測中,FAST算法正如其名,檢測速度遠超另外兩種算法,然而其受噪點影響明顯,抗旋轉性不強;Harris算法在測試實驗表現的中規中矩,在實驗圖像上可以明顯看出特征點基本在各角點處;SURF算法的各項測試的穩定性最強,有著較強的旋轉不變,魯棒性強的特點。由于SURF算法的實現借助了OpenCV的運行庫,可能會對其運算處理上有一定的提速,在該組實驗中僅供參考。
實景圖匹配實驗使用的是九江城郊地區航空影像圖,航向重疊度60%,旁向重疊30%,航拍高度800 m,影像格式為jpeg,分辨率為3 744×5 616。實驗結果見表2,圖3~5分別為FAST、Harris、SURF特征點匹配示意圖。
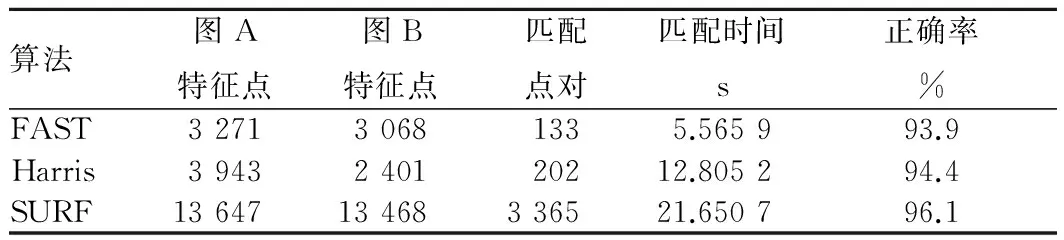
表2 實景圖測試實驗的統計結果
通過實景圖測試實驗可以看出,在實際航空影像中,FAST匹配時間為5.566 s,處理速度極快,比Harris算法和SURF算法要快很多倍,正確率為93.9%,魯棒性能一般,容易對相鄰的多個特征點進行重復檢測,導致特征點局部密集,正確率相對較低。Harris算法所提取特征點的角點信息較為明顯,匹配時間為12.085 s,匹配速度一般,匹配正確率為94.4%,略微高于FAST算法。SURF算法匹配率為96.1%,有著最佳的匹配效果,可獲得大量特征點,但其在匹配速度上有著明顯的劣勢,匹配時間為21.651 s。
3 結語
由于在航空攝影測量中,航空影像有著既定的技術質量控制,圖像效果較為理想,弱化了FAST算法在圖像旋轉,抗噪性較差的不足,當需要實時高速,且匹配精度要求不苛刻的工作任務時,是一個不錯的選擇。Harris算法各項性能較為均衡,適合對有明顯角點信息的圖像匹配進行處理。SURF雖然在匹配速度上并不理想,但各項性能都較為優秀,有著較高的精度保障,當工作任務對時間要求不高時建議使用該算法,以獲得最佳的匹配效果。

圖3 FAST匹配示意

圖4 Harris匹配示意
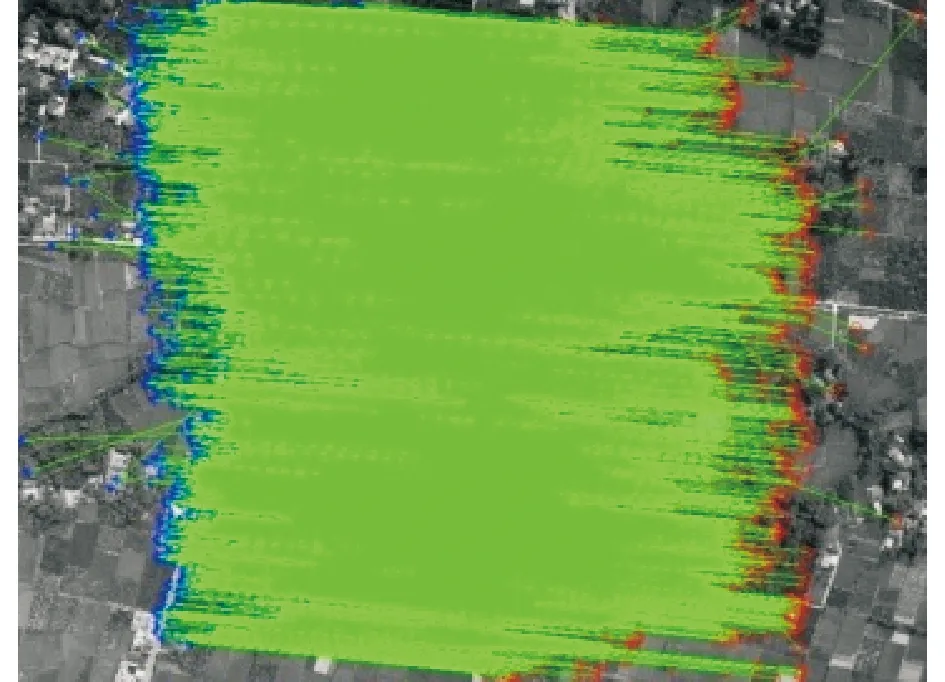
圖5 SURF匹配示意
該研究為了客觀評價出各匹配算法的性能,并未對匹配最佳效果的處理方案進行選擇。在實際工作中,為了提高匹配工作的準確度,在影像匹配前使用合適的影像處理方法,在特征點提取后使用選擇性能優秀的匹配搜索方法,以及影像匹配后的誤差剔除方法,都是值得進一步研究的方向。
[1] 張祖勛,張劍清. 數字攝影測量學[M].武漢: 武漢大學出版社,1997.
[2] ROSTEN E, DRUMMOND T. Machine learning for high speed corner detection[J].Lecture Notes in Computer Science, 2006, 3951:430-443.
[3] HARRIS C, STEPHENS M. A Combined Comer and Edge Detector[C]//Proceedings of the 4th A levy Vision Conference.[s.n.], 1988: 147-151.
[4] BAY H, TUYTELAARS T, VAN GOOL L. SURF: speeded up robust feature[J]. Comput Vision Im Understanding, 2008, 110(3):346-359.
[5] SMITH S M, BRADY J M. SUSAN-A New Approach to Low Level Image Processing[J]. International Journal of Computer Vision, 1997, 23(1): 45-78.
[6] MORAVEC H P. Towards automatic visual obstacle avoidance[C]//Proceedings of International Joint Conference on Artificial Intelligence. Cambridge, MA, USA:[s.n.], 1977:584-590.
[7] LOWE D G. Object recognition from local scale-invariant features[C]//International Conference on Computer Vision.Corfu, Greece,1999:1150-1157.
[8] LOWE D G. Distinctive image features from scale-invariant key points[J]. International Journal of Computer Vision, 2004, 60(2):91-110.
The Research of Aerial Photography Matching Algorithm Based on Feature Points
WANG Hao
(Faculty of Geomatics,East China Institute of Technology, Nanchang, Jiangxi 330013)
In the image matching algorithm, fast and efficient matching algorithm is the key toaerial survey. The image matching algorithm based on feature point extraction has the characteristics of high precision, wide applicability, and becoming a mainstream in the research of image matching. Three kinds of rapid, classic feature point matching algorithms, including FAST, Harris, SURF in test image and aerial photography were compared and analyzed, the advantages and disadvantages were discussed, which can provide reference for selection of feature point matching method in various situation.
Image matching; Feature point extraction; Aerial photography; Feature points matching
汪豪(1988-),男,福建廈門人,碩士研究生,研究方向:地圖學與地理信息系統。
2014-12-18
S 126
A
0517-6611(2015)04-360-03
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
