基于DOB和ZPETC的PWM驅動快速反射鏡控制方法研究*
2015-03-02 06:25:36王福超田大鵬王昱棠
機電工程 2015年7期
王福超,田大鵬 ,王昱棠
(中國科學院航空光學成像與測量重點實驗室中國科學院長春光學精密機械與物理研究所,吉林長春130033)
0 引 言
隨著航空成像設備的不斷發展,成像設備的探測距離已由十幾公里逐步提升至幾十公里、甚至幾百公里,隨著探測距離的不斷提升,對成像設備的穩定精度要求也越來越高。目前國內穩定平臺所能達到的穩定精度在25 μrad(RMS),國外穩定精度可以達到5 μrad(RMS)。針對載體擾動的抑制問題,傳統方法通過兩軸兩框架或兩軸四框架結構隔離載體擾動,由于機械結構特性以及電機力矩限制,系統的帶寬及穩定精度難以在本質上得到進一步提升。因此,通過引入復合軸系統實現高精度視軸穩定[1-2]。復合軸結構是在大慣量跟蹤架的主光路中裝方位、俯仰均可微動的高諧振頻率快速反射鏡(fast steering mirror,FSM)[3]。快速反射鏡具有體積小、質量輕、結構緊湊、速度快、精度高、帶寬高等優點[4-5],廣泛應用于空間光通信、像移補償以及高精度跟蹤瞄準等領域[6-7]。快速反射鏡通常采用壓電陶瓷和音圈電機(voice coil motor,VCM)進行驅動[8]。壓電陶瓷驅動方式可以提供較大的力矩輸出,以及高帶寬響應,但該種驅動方式反射鏡的角位移行程較小,并且驅動電路復雜、功耗高。基于音圈電機快速反射鏡角位移行程較大,可以達到10°~15°范圍,并且動態特性好。音圈電機通常采用PWM 和線性放大器兩種方式進行驅動。線性放大器驅動方式驅動器線性度較好,但驅動效率低、發熱量大。PWM 驅動方式可以提高驅動器的效率,并且功耗較低。
傳統的直流力矩電機通過引入電流閉環控制,可以改變速度回路控制對象的特性,提高控制系統的跟蹤精度[9-10],并且可以簡化系統的數學模型。但由于音圈電機反射鏡自身慣量較小,電機輸出力矩較大,采用電流閉環方式進行驅動,音圈電機極易受到外界噪聲以及控制電流噪聲的影響,影響反射鏡的控制精度。采用PWM 電流開環驅動方式可以消除電流噪聲的影響,但摩擦力矩、不平衡力矩以及模型攝動等因素都將影響控制器的實際實現效果[11-12],反射鏡通常不能滿足高精度、高帶寬、高剛度的要求。
為了獲得更好的動態性能和剛度,本研究提出一種基于ZPETC 及DOB 的音圈電機快速反射鏡控制器。筆者研究內容安排如下:
(1)辨識高精度系統模型。根據系統動力學特性,建立系統模型的數學表達式。通過實驗給出PWM驅動方式的特性。
(2)控制算法設計。針對PWM 驅動方式所存在的問題,以及快速反射鏡存在的擾動、模型攝動問題,建立基于干擾觀測器的擾動抑制控制器,并且設計零相差前饋控制器,進一步提高系統的跟蹤性能。
(3)實驗驗證以及實驗結果分析。通過掃頻方式擬合出系統精確的數學模型,建立基于ZPETC 和DOB的復合控制方法,并通過實驗平臺進行驗證,分析實驗結果。
1 系統模型
音圈電機是直線電機的一種,其體積較小、具有良好的動態響應特性、并且控制方便,因此特別適合高帶寬、高精度的運動控制。音圈電機物理模型如圖1所示。
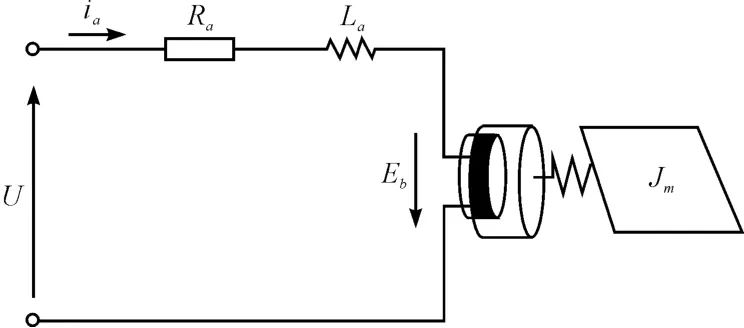
圖1 音圈電機物理原理圖
在實際機械伺服系統中,機械諧振模態普遍存在,其產生原因是傳動軸并非完全剛性,受力后發生彈性扭曲變形。對于音圈電機直接驅動伺服系統,考慮機械諧振模態的情況下,一般采用雙質量體模型來描述系統動態。根據快速反射鏡動力學特性建立系統方框圖如圖2 所示。
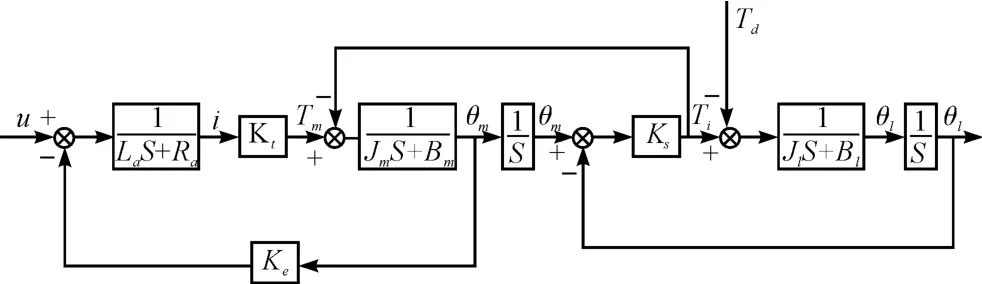
圖2 考慮諧振模態的快速反射鏡系統框圖
本研究采用PWM 電流開環方式驅動快速反射鏡運動。在電流開環的情況下利用偽隨機噪聲作為模型辨識的輸入信號,通過Matlab 模型辨識工具箱對被控對象傳遞函數進行辨識,輸入信號與輸出信號如圖3所示。辨識得到的快速反射鏡電流開環系統模型如圖4 所示。
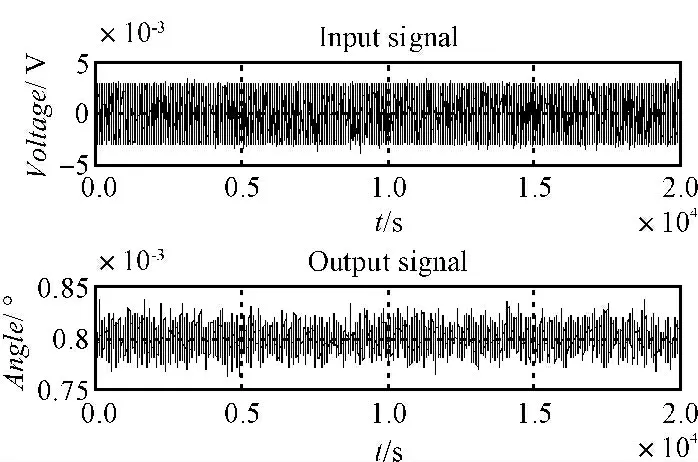
圖3 電流開環系統辨識輸入信號與輸出信號
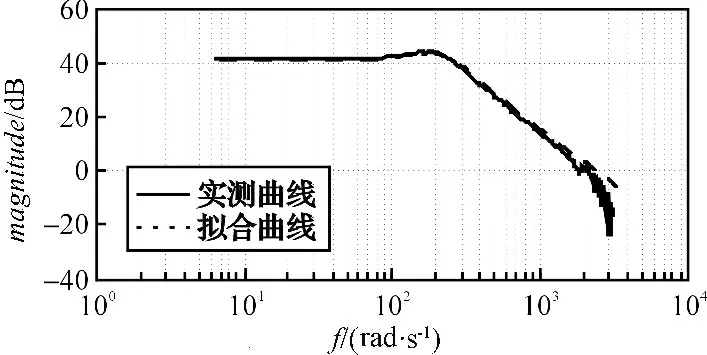
圖4 快速反射鏡電流開環系統模型
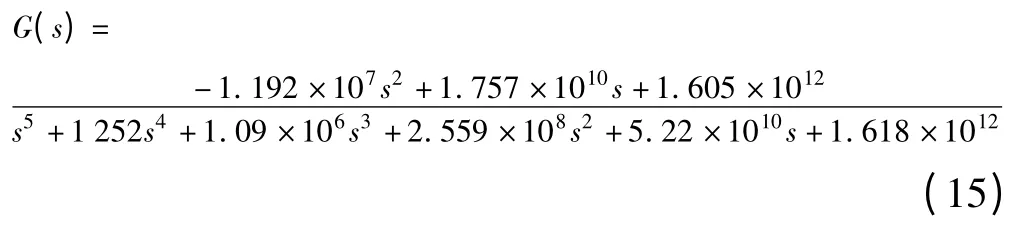
擬合得到系統傳遞函數:

從圖4 的擬合結果可以看出系統在200 rad/s 的頻率點出現諧振峰值,因此需要加入阻尼系數消除該諧振點的影響。根據式(1)可知系統為二階系統:

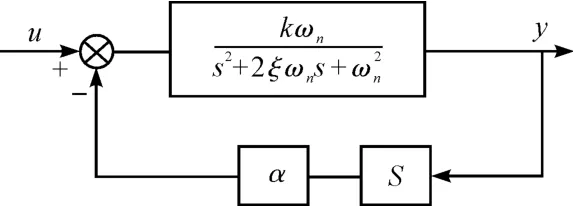
圖5 加入阻尼系數環節
根據圖5 所示的框圖可知,改變α 的值可以改變系統的阻尼系數,消除系統的諧振點影響。通過計算取α=0.000 03 擬合加入阻尼之后系統模型:

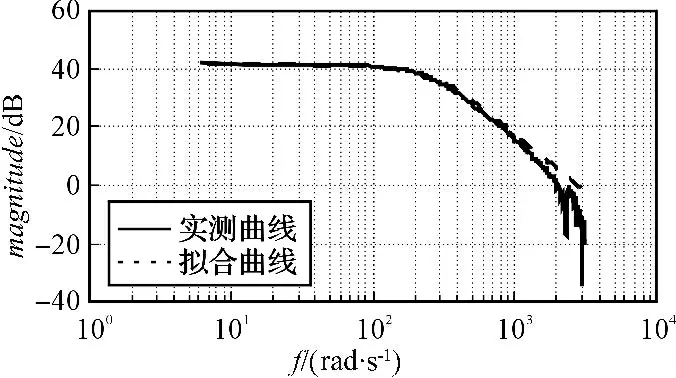
圖6 加入阻尼后擬合結果
2 快速反射鏡魯棒控制系統
由于采用電流閉環的方式進行驅動使得驅動電流的噪聲較大,影響音圈電機的控制精度,本研究針對該問題采用電流開環的方式進行控制,并且采用ZPETC和DOB 的復合控制方法提高反射鏡的控制精度以及系統帶寬。
Tomizuka M[13]在完全跟蹤控制思想的基礎上提出了零相位跟蹤控制器[14],ZPETC 方法可以提高系統的跟蹤性能,有效地解決系統延時問題,但由于是開環控制,控制器的性能依賴被控對象數學模型的精確性。首先應對被控系統進行閉環控制,在一定程度上減小外界干擾以及被控對象模型參數變化對ZPETC 控制性能的影響。干擾觀測器[15]是一種根據內模原理設計的控制方法,其能夠檢測出系統的干擾力和模型波動,并且克服機械非線性、摩擦以及模型參數變化對控制器性能的影響,并且能夠使系統模型保持魯棒性。為此,本研究設計了基于干擾觀測器的魯棒控制方法,克服了系統參數變化對系統性能的影響。在低頻段使得實際被控對象的響應逼近名義模型的響應,在此基礎上筆者采用ZPETC 進行補償,使系統相位為零,幅值近似為1。
2.1 干擾觀測器原理
干擾觀測器的基本原理是測量外部力矩干擾及模型參數變化造成的實際對象與名義模型輸出的差異,并將此估計值作用于系統達到消除干擾的目的。DOB的基本原理圖如圖7 所示。
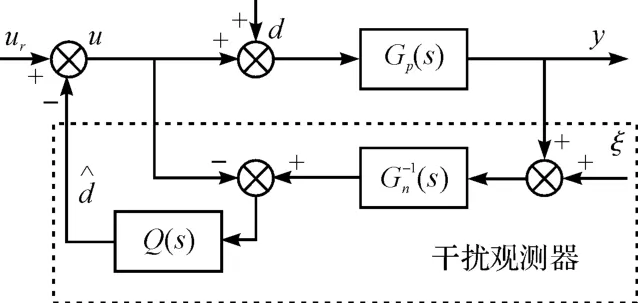
圖7 干擾觀測器原理框圖
系統的輸出y 為:
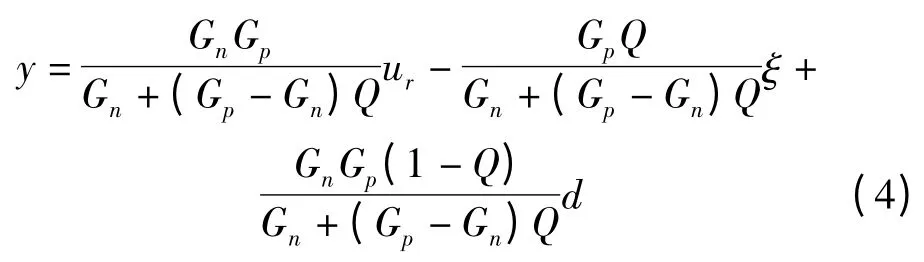
當系統被控對象和系統的標稱模型相同的時候系統的輸出y 為:

其中:Q(s)—具有低通濾波特性,在低頻段Q(s)=1,在高頻段可以認為Q(s)=0。由式(5)可以看出在低頻段即使系統存在干擾,系統也可保證較好的魯棒性。
經過分析可知,帶有干擾觀測器的系統靈敏度函數和補靈敏度函數為:
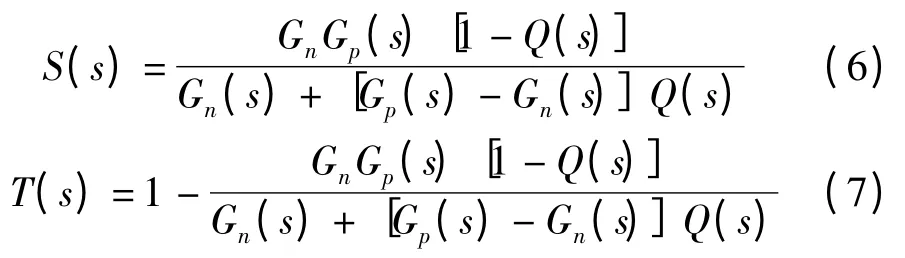
系統魯棒穩定的充分必要條件是:

其中:ΔM=Gp(s)-Gn(s)。
由上式可以看出濾波器的設計結果直接影響干擾觀測器的穩定性。
通常濾波器的設計結構如下:
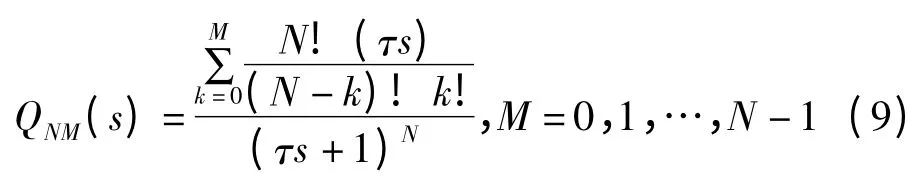
式中:N—分母階數,M—分子階數。
在進行濾波器Q(s)設計過程中對分子分母的階數給予如下考慮:
(1)對于諧振頻率較高的系統,可與選擇較大的分子階數來保證系統的抗干擾能力以及減小系統干擾估計的相位滯后。
(2)若系統的諧振頻率較低,可以選擇Q(s)的分子階數為0,再調整截止頻率和分母階數,在抗干擾能力和穩定性之間折衷。
(3)設計Q(s)的分母時,應使Q(s)的相對階不小于被控對象名義模型Gn(s)的相對階,以保證Q(s)正則,物理可實現。
2.2 零相差前饋控制控制器
為了提高系統的動態跟蹤性能,Tomizuka 提出了ZPETC,其基本思想是基于零極點對消。其基本結構如圖8 所示。
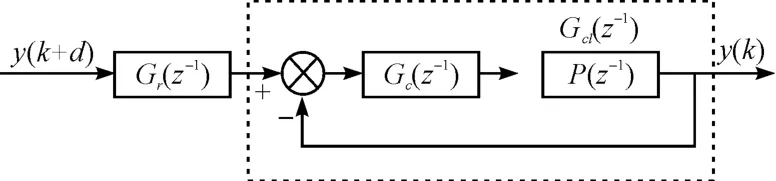
圖8 ZPETC 結構框圖
加入控制器的閉環系統經過雙線性變換可以得到如下形式的離散傳遞函數:

式中:z-d—系統d 步延時,—閉環傳遞函數分子多項式中包含穩定零點的部分,—分子多項式中包含不穩定零點的部分。
考慮上述離散閉環傳遞函數,設計ZPETC 控制器:

則整個系統的傳遞函數為:

當z=ejωt時,系統的傳遞函數為:

從式可以看出傳遞函數是一個不含虛部的非負實數,因此在系統的相移在整個頻域內為0,在一定范圍內幅值接近為1。
3 實 驗
本研究以音圈電機快速反射鏡為對象進行了實驗驗證,音圈電機如圖9 所示。實驗平臺原理框圖如圖10 所示。控制系統以HRT1000 半實物仿真系統為核心,控制算法通過Matlab Simulink 進行搭建,并在Vx-Works 實時操作系統上運行。控制信號通過PCI 總線上的16 位D/A 轉換卡與電機驅動器相連,反饋信號通過A/D 轉換器進行采集,系統的采樣時間為1 ms。
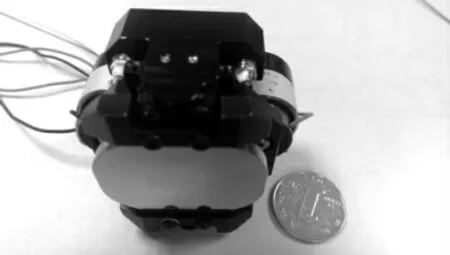
圖9 音圈電機驅動快速反射鏡
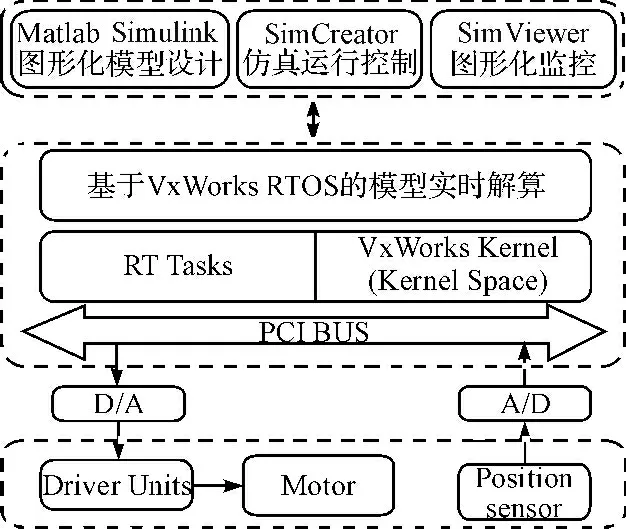
圖10 實驗平臺原理框圖
首先,本研究針對式(3)進行DOB 和PID 控制器設計。引入DOB 和PID 后的掃頻結果如圖11 所示。考慮式被控對象的名義模型,根據3.1 節的論述設計濾波器Q(s),本研究采用二階濾波器形式,并且取τ=0.000 8:

PID 控制器取kp=0.2,ki=15,kd=0。針對引入DOB 和PID 控制器的閉環系統,通過正弦掃頻的方式擬合獲得系統閉環頻率特性及傳遞函數:
接著設計ZPETC。針對上述傳遞函數設計ZPETC控制器:
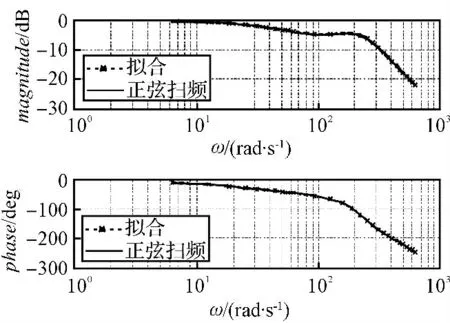
圖11 引入DOB 和PID 后的掃頻結果

針對上述設計的控制器,在反射鏡0 輸入條件下系統的靜態誤差如圖12 所示。從圖12 中可以看出反射鏡的靜態誤差為26.2 μrad。采用PWM 電流閉環方式的靜態控制精度如圖13 所示。比較圖12 和圖13結果可以看出,引入ZPETC 和DOB 后的靜態控制精度明顯高于電流閉環驅動方式。
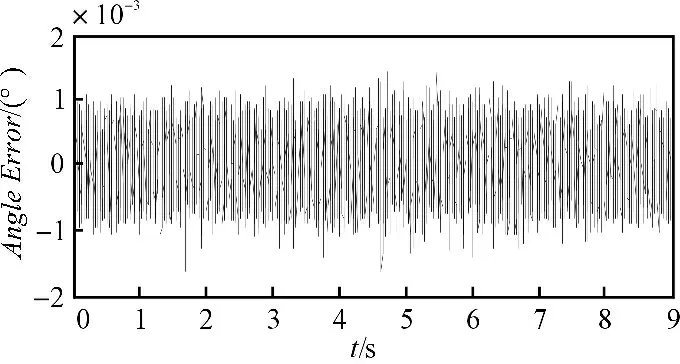
圖12 基于ZPETC 和DOB 控制的靜態控制精度
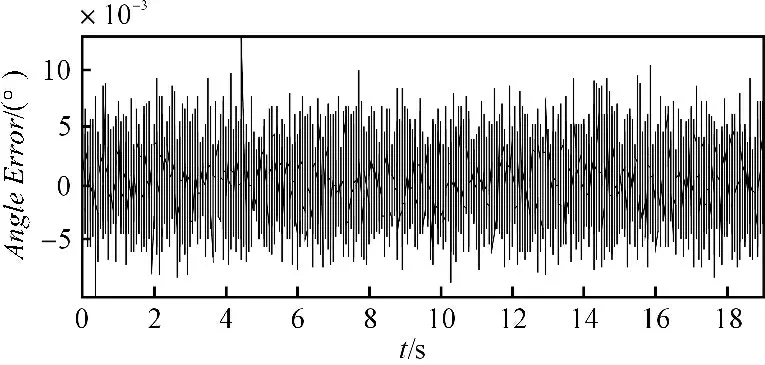
圖13 采用PWM 電流閉環靜態控制精度
加入ZPETC 的閉環系統頻率特性如圖14 所示。從實驗結果可以看出加入ZPETC 后反射鏡的控制帶寬可達到150 Hz,采用ZPETC +PID +DOB 的控制策略保證了反射鏡電流開環的情況下有較高的定位、跟蹤精度,并且有效地抑制了外界干擾對控制器性能的影響。
4 結束語
本研究針對音圈電機快速反射鏡的PWM 驅動方式設計基于DOB 和ZPETC 的控制方法,通過DOB 克服了摩擦力矩、不平衡力矩以及模型不確定性的因素的干擾,提高系統的魯棒性;同時通過設計ZPETC,保證了系統的快速性和跟蹤精度。實驗結果表明,筆者設計的控制算法能夠很好地保證反射鏡的跟蹤性能,同時零相差前饋控制方法保證系統控制帶寬達到150 Hz,有效改善系統動態性能。
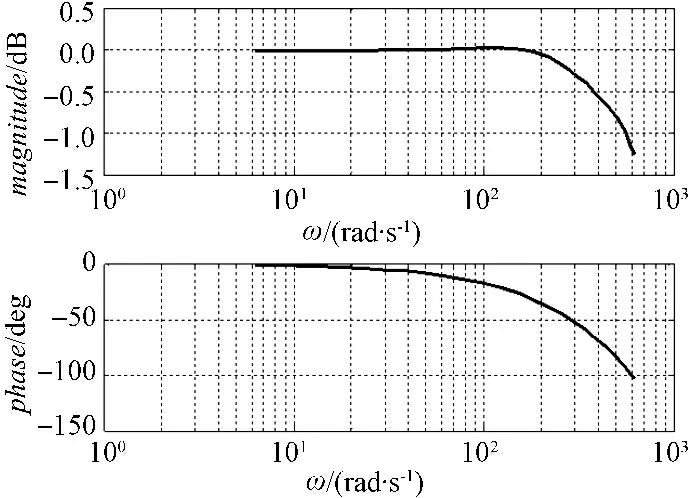
圖14 引入零相差之后系統的閉環頻率特性
[1]楊 東,毛 耀,丁 科,等.模型參考算法在快熟反射鏡中的應用[J].紅外與激光工程,2013,42(10):2790-2795.
[2]徐飛飛,紀 明,解 靜,等.FSM 在高精度瞄準線穩定系統中的應用研究[J].應用光學,2012,33(1):9-13.
[3]彭樹萍,于洪君,王偉國,等.新型快速反射鏡伺服系統設計[J].紅外與激光工程,2014,43(5):1610-1615.
[4]KLUK D ,BOULTE M T,TRUMPER D L. A high-bandwidth,high-precision,two-axis steering mirror with moving iron actuator[J].Mechatronics,2012(22):257-270.
[5]黑 沫,魯亞飛,張智永,等.基于動力學模型的快速反射鏡設計[J].光學精密工程,2013,21(1):53-61.
[6]魯亞飛.快速反射鏡機械結構特性設計問題研究[D].長沙:國防科技大學機電工程與自動化學院,2009.
[7]NéSTOR O,ARANCIBIA P,GIBSON,et al. Frequencyweighted minimum-variance adaptive control of laser beam jitter[J]. IEEE/ASME Trans. Mechatronics,2009,14(3):337-348.
[8]YU Hsing-cheng,CHEN Tsan-chen,LIU Chien-sheng. Adaptive fuzzy logic proportional-integral-derivative control for a miniature autofocus voice coil motor actuator with retaining force[J].IEEE Trans. Magn,2014,50(11):243-250.
[9]黃永梅,張 桐,馬佳光,等.高精度跟蹤控制系統中電流環控制技術研究[J].光電工程,2005(32):16-19.
[10]丁 濤.一種光電轉塔精確跟蹤算法[J].兵工自動化,2013(4):82-84.
[11]LIU C-S,KO S-S,LIN P-D. Experimental characterization of high-performance miniature auto-focusing VCM actuator[J].IEEE Trans. Magn.,2011,47(4):738-745.
[12]TANG Tao,MA Jia-guang,REN Ge. PID-I controller of charge coupled device-based tracking loop for fast-steering mirror[J].Optical Engineering,2011,50(4):643-655.
[13]TOMIZUKA M. Zero phase error tracking algorithm for digital-control[J]. Journal of Dynamic Systems Measurement and Control-Transactions of the Asme,1987,109(1):65-68.
[14]李志軍,劉成穎,孟凡偉,等. 基于ZPETC 和DOB 的直線電機控制器設計及實驗研究[J].中國電機工程學報,2012,(24):134-140.
[15]OHNISHI K,SHIBATA M,MURAKAMI T. Motion control for advanced mechatronics[J]. IEEE/ASME Transactions on Mechatronics,1996,1(1):56-67.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19