基于RFID技術的行李管理應用研究*
2015-03-02 06:25:56王中友吳哲夫
機電工程 2015年7期
徐 捷 ,王中友 ,吳哲夫
(1.浙江商業職業技術學院,實訓處,浙江杭州310053;2.浙江省通信產業服務有限公司,浙江杭州310050;3.浙江工業大學信息工程學院,浙江杭州310023)
0 引 言
在鐵路行李托運過程中,由于托運物品數量多和工作人員有限,難免會發生行李物品錯拿或丟失情況,如何降低行李失竊和誤領風險是具有實際意義的研究課題。為了在從客運站托運處到列車車廂的搬運過程中方便管理每一件托運物品,需要在客運站內建立相應定位系統動態獲取托運物品的位置信息,并通過網絡傳輸至管理中心實現物品監控。目前,用于室內定位和物品定位的技術主要有紅外線定位、Wi-Fi 定位[1-2]、Zigbee 定位[3-4]和RFID 定位[5-7]技術等。其中關于Zigbee 定位的文獻采用了基于Zigbee 網絡的車站行李定位技術,由于必須將Zigbee 接收節點固定于行李上才能實現基于RSSI 值定位,該方案的實際應用成本較高。
本研究所采用的基于RFID 定位方案具有非視距傳播范圍大、讀寫速度快、安全性高等優點,并且由于RFID 標簽價格便宜,系統性價比較高,相比其他技術更適合應用于客運站。
1 基于RFID 的LANDMARC 定位技術
射頻識別RFID 是一種利用射頻信號的非接觸式自動識別技術,可同時自動識別多個物體,并且系統結構簡單,具有廣泛的應用。
LANDMARC 系統[8-9]是一種改進的RFID 定位技術,通過引入位置固定的參考標簽來輔助定位,從而增加室內系統定位精確性而不增加閱讀器數量。定位環境由輔助定位的傳感網絡和移動設備組成,其中包括4 個RF 閱讀器、若干個參考標簽和一個待定位標簽。
系統中當某個待定位標簽與參考標簽的空間距離相近時,它們對于同一個RFID 閱讀器的信號強度值也應該是相近的。LANDMARC 的具體求解過程如下:
假設有一個n 個閱讀器,m 個參考標簽以及u 個跟蹤標簽組成的定位系統,那么跟蹤標簽p 和參考標簽q 的歐幾里得距離(D)計算公式為:



其中:參數wi由下式給出:

2 改進的LANDMARC 系統
2.1 改進的LANDMARC 系統算法
改進的LANDMARC 算法將區域分為若干個小的定位子區域,算法布局圖如圖1 所示。每個子區域由1 個主參考標簽和8 個相鄰的次參考標簽組成。主參考標簽屬于第一層參考標簽,間距在2 m 左右;而次參考標簽屬于第二層參考標簽,間距在1 m 左右,由此可將整個定位區域分為三層定位結構。當算法應用于列車客運站行李托運系統時,實際分層結構可以根據行李數量作具體調整。在標簽數量較大時,可以通過增加分層結構來減少數據負載,從而提高定位效率。
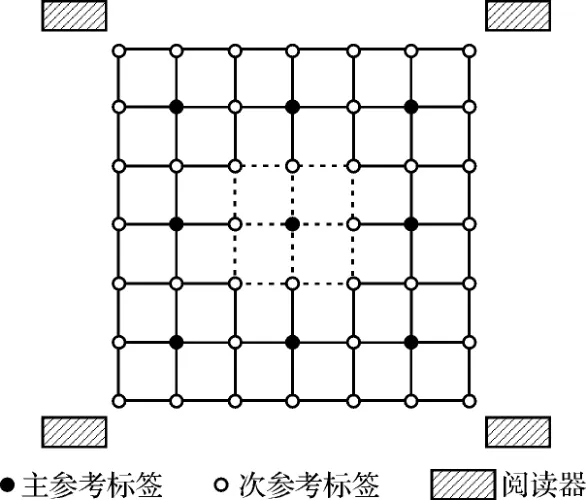
圖1 改進LANDMARC 算法布局
具體定位過程可以分為4 個步驟:
(1)確定跟蹤標簽所在的定位子區域。定位子區域和主參考標簽一一對應,只要找出最近的主參考標簽,就能確定其所在的子定位區域。假設有n 個RF讀取器,p 個主參考標簽,u 個跟蹤標簽。本研究利用式(1,2)計算跟蹤標簽和主參考標簽之間的歐氏距離,得到距離矢量,對距離矢量中各分量排序,選出最小的歐氏距離,對應的主參考標簽所在區域即為所求的定位子區域。
(2)每一個定位子區域可以進一步分成4 個定位區域。假設在(1)中確定的主參考標簽為PTk,選取PTk周圍相鄰的8 個次參考標簽,計算8 個次參考標簽和跟蹤標簽之間的歐氏距離,選出距離跟蹤標簽最近的次參考標簽ST1。接下來,本研究在剩余的7 個次參考標簽中選出與跟蹤標簽次近的次參考標簽,同時這個標簽必須是ST1的兩個相鄰標簽之一。這樣確定了1 個主參考標簽和2 個相鄰的次參考標簽,也就確定了跟蹤標簽所在的矩形區域。由上述定位步驟可知,這個矩形區域由1 個主參考標簽PTk和3 個相鄰的次參考標簽(ST1ST2ST3)組成。
(3)與LANDMARC 系統相同,改進算法采用k-最近鄰算法和加權算法計算跟蹤標簽的位置。這里式(3)中k=4,得:

改進算法把參考標簽分為主參考標簽和次參考標簽這兩層,逐層搜索跟蹤標簽的最近鄰居來實現快速定位。當參考標簽數量很多時,可以將參考標簽分為3 層或者更多層,最終將跟蹤標簽定位在由4 個參考標簽組成的矩形區域內。
(4)為進一步提高定位精度,該算法引入修正誤差向量的概念。通常情況下,跟蹤標簽和最近鄰居距離不超過1 m,因此可以近似認為兩者定位誤差向量相同,可由此修正式(5)計算得到的跟蹤標簽坐標。
為了計算修正誤差,首先需要確定距離跟蹤標簽最近的參考標簽,即關鍵參考標簽(key reference tag,KT)。本研究比較主參考標簽PTk和3 個相鄰的次參考標簽(ST1ST2ST3)到跟蹤標簽的歐式距離,選出關鍵參考標簽。通過利用式(2~4)計算得到KT 的計算坐標(p',q'),已知KT 的真實坐標為(p,q),因此可以得到KT 的定位誤差向量:。假設跟蹤標簽真實坐標為(x,y),由式(5)計算得到的跟蹤標簽的計算坐標為(x',y'),則有:

由式(6)變換得到修正后的跟蹤標簽計算坐標:

2.2 改進的LANDMARC 系統硬件
實驗選用了RF Code 公司的M100 標簽和M250閱讀器。M100 是有源標簽,對每個標簽預編譯7 個字符的ID 號,采用ASK 調制編碼,典型傳輸范圍為90 m。M100 標簽可以通過編碼設置成兩種信標率,在低速狀態下其壽命可達5年。
實驗采用的M250 閱讀器工作在308 MHz,工作范圍為45 m,提供8 個遞增的閱讀范圍。通過組態軟件和應用接口,閱讀器可在7.5 s 內讀取500 個標簽的數據,可同時監視1 400 個信標速率為10 s 的標簽。
3 改進的客運站行李托運管理系統
3.1 系統構建
基于改進LANDMARC 算法的行李托運管理系統由固定在行李上的RFID 標簽、托運處布置的參考標簽、少量閱讀器和數據管理系統組成,參考標簽和閱讀器位置如圖2 所示。
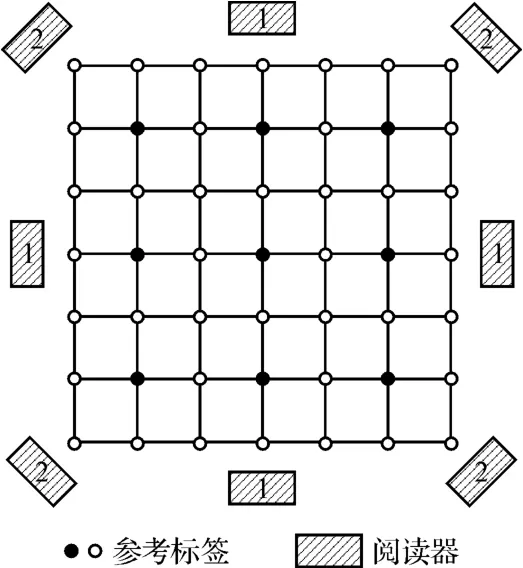
圖2 閱讀器和參考標簽位置
當行李在列車站托運處時,行李上的標簽處于靜止狀態,以低信標率發送自身ID 號和狀態信息。當行李從托運處轉移到列車上時,其中動作傳感器被激活,標簽以高信標率發送信息給閱讀器。閱讀器將實時收集到的射頻信號強度信息通過TCP/IP 協議轉發給后臺系統。對于M250 閱讀器,信息可以通過兩種途徑傳遞:一種為有線方式,即使用RJ45 端口以太網;另一種為無線方式,即通過802.11 b/g 標準傳輸。后臺數據處理系統使用改進后的LANDMARC 算法計算托運行李的位置并在控制臺上顯示相應坐標。行李出站之前如果其RF 標簽發生故障或者被人為破壞,則內置的纂改開關自動開啟,發出警報信號,從而有效降低行李丟失和誤拿概率。
3.2 實驗結果分析
實驗測試了不同配置和位置條件影響下的改進算法的性能,并與原算法進行了比較。
3.2.1 閱讀器位置對定位精度的影響
實驗先對閱讀器不同擺放位置下的兩種算法定位誤差進行了比較,其結果如圖3 所示。原算法在位置1和位置2 的平均定位誤差分別為0.227 m 和0.184 m,而改進算法則是0.154 m 和0.152 m,結果表明4 個閱讀器如位置2 擺放時較位置1 能有效提高LANDMARC 算法的標簽定位精度,因此以下實驗都將閱讀器放在位置2。
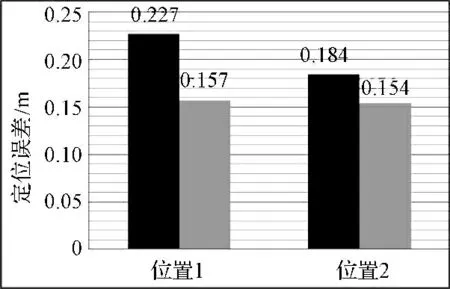
圖3 閱讀器不同位置的定位誤差比較
3.2.2 參考標簽間距對定位精度的影響
實驗還選取和測試了參考標簽的不同間距對改進前后兩種算法的定位誤差影響。結果發現,當標簽間距離逐漸增大時,其定位誤差也逐漸增大:當標簽間距d=0.5 m 至d=1.25 m 時誤差增速較緩,而后至d=5 m過程中則迅速增大。直觀上,參考標簽密度越大使得確定的定位區域越小,因而定位誤差也越小。但實際應用中,隨著標簽密度增大,其標簽間的電磁干擾也隨之增大,從而導致定位精度反而下降。綜合考慮各種因素,實驗選定的標簽間距為1 m。
3.2.3 不同參考標簽數量下的算法耗時比較
兩種算法的定位速度與參考標簽數量之間關系的比較如圖4 所示。當標簽數量較少時(標簽數量n =121 時),原始算法耗時0.092 s,改進算法耗時0.09 s,減少了2%的計算時間,改進的效果并不明顯。隨著標簽數量增大,兩種算法的計算負載差距越來越大,當n=260 1 時,原始算法耗時2.084 s;改進算法僅耗時1.394 s,減少了33%的計算時間。可見隨著參考標簽數量增加,改進算法避免了大量冗余計算,因而節約了計算時間,可以滿足實時定位如動態跟蹤的需求。
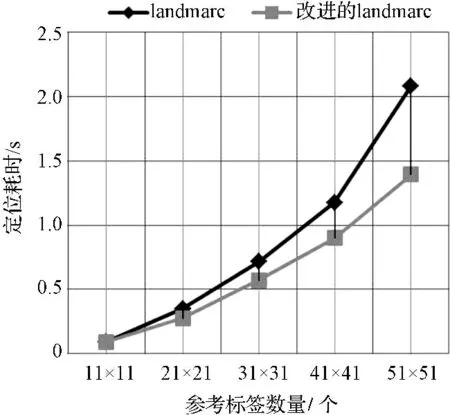
圖4 算法定位速度比較
考慮到單次實驗誤差的偶然性,1 000 次實驗結果比較如圖5 所示。原始算法和改進算法的平均誤差分別為0.19 m 和0.15 m,定位精度平均提高18%。改進算法利用參考誤差修正跟蹤標簽的計算坐標,抵消了部分環境因素對定位精度產生的干擾,使得改進算法的定位精度優于原始算法。
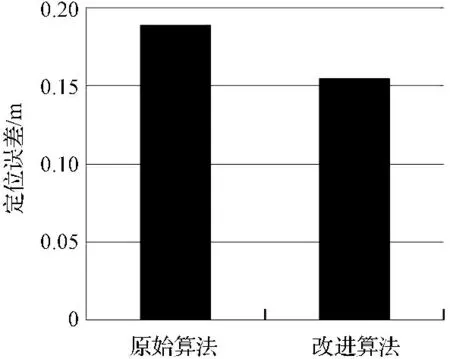
圖5 算法的平均定位誤差比較
4 結束語
本研究在討論RFID 技術和改進LANDMARC 定位算法的基礎上,結合火車客運站內行李物品定位的實際需要,提出了基于參考標簽的分層結構用于改進原LANDMARC 算法。實驗平臺通過比較閱讀器位置、參考標簽間距和標簽個數等參數比較了改進算法與原算法的定位效果,同時給出了在實驗條件下的較佳配置參數。實驗結果表明,改進算法具有更快的定位速度和更高的定位精度,具有一定的應用價值。
在改進算法的實際應用中還需考慮到人員走動、手機設備以及環境變化等干擾因素的存在,研究者在定位算法處理前必須對數據進行合理性判斷,如通過指紋庫模型和統計檢驗剔除異常數據,從而滿足客運站應用場景下的實際物品定位要求。
[1]孫善武,王 楠,陳 堅. 一種改進的基于信號強度的WLAN 定位方法[J].計算機科學,2014,41(6):99-103.
[2]王殿君,一種基于WLAN 的RSSI 值獲取方法[J]. 機床與液壓,2013,41(17):41-43.
[3]張積洪,劉天浩.基于ZigBee 和GPRS 技術的行李定位系統[J].單片機與嵌入式系統應用,2013,13(11):60-62.
[4]劉小康,郭 杭.基于Zigbee 室內定位系統的指紋庫優化算法[J].計算機工程,2014,40(2):193-198.
[5]MA Yong-tao,ZHOU Liu-ji,LIU Kai-hua,et al. Iterative phase reconstruction and weighted localization algorithm for indoor RFID-based localization in NLOS environment[J].IEEE Sensors Journal,2014,14(2):597-611.
[6]戴光麟,梁學利,肖致友,等.低溫食品運輸過程環境監測系統研究[J].機電工程,2014,31(2):191-194.
[7]藺宏良,黃曉鵬. 車聯網技術研究綜述[J]. 機電工程,2014,31(9):1235-1238.
[8]汪 冬,葛萬成,莫國民,等.基于參考標簽可信度和偏差自校正的RFID 室內定位算法[J].計算機應用,2014,34(11):3170-3172.
[9]BASHERR M R,JAGANNATHAN S. Localization of RFID tags using stochastic tunneling[J]. IEEE Transactions on Mobile Computing,2013,12(6):1225-1235.
[10]李軍懷,張果謀,于 蕾,等.具有環境自適應性的虛擬參考標簽定位方法[J]. 應用科學學報,2013,31(4):402-410.
[11]鄒學玉,韓付偉. 基于LANDMARC 的最近鄰居改進算法[J].武漢大學學報:理學版,2013,59(3):112-116.
[12]KUCUKTUNC O, FERHATOSMANOGLI H. λ-diverse nearest neighbors browsing for multidimensional data[J].IEEE Transactions on Knowledge and Data Engineering,2013,25(3):481-493.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52