軌道不平順波形檢測系統精度分析與優化
2015-03-08 08:22:24崔瀚鈺上海鐵路局科研所
上海鐵道增刊 2015年2期
崔瀚鈺 上海鐵路局科研所
軌道不平順波形檢測系統精度分析與優化
崔瀚鈺 上海鐵路局科研所
針對設計完成的一種附加排輪結構軌道不平順波形檢測系統,通過嚴格的數學推理,并參考現場實際經驗,合理設計分析參數,相對精確地分析出整套軌道不平順波形檢測系統的檢測精度。在此基礎上,推導并建立合理的數學模型,利用Matlab軟件對檢測系統進行模擬仿真測試,為檢測系統的設計改進提出合理化建議,在更好地適應現場使用的同時,相應地提高檢測系統的檢測精度。
排輪結構;軌道不平順;波形檢測;精度分析;優化
近年來,隨著高速鐵路的迅猛發展,列車速度的大幅提高,以及旅客舒適度體驗的不斷要求,我們對于軌道不平順的關注與研究也在相應地加強。為了更為真實有效地檢測軌道不平順,我們設計研究了具有機械濾波和長波連續檢測功能的新型軌道不平順波形檢測系統。新的檢測系統不僅能夠相對精確地復原軌道實際不平順波形,同時解決了特定短波檢測無法復原的問題。為了進一步優化整個軌道不平順波形檢測系統,我們首先需要對檢測系統的檢測精度做出量化的分析。
1 車體傾斜對于檢測精度的影響
常用的軌道不平順波形檢測方法有:單點直接檢測、弦測法等。然而無論哪種檢測方法,都存在一個問題:即一定程度上忽略了小車檢測過程中,由于車體傾斜造成的檢測誤差。這里需要說明的是,許多系統會在后續的波形復原過程中,人為給予一定的補償。然而由于軌道不平順波形的極大隨機性,我們很難對補償量做出合理的說明。
我們以單點檢測為例分析車體傾斜對檢測精度的影響:
我們的軌道不平順波形檢測系統可視為一輛具有排輪結構的檢測小車。如圖1所示,設檢測小車的結構參數如下:排輪長度為p,兩排輪與軌面的接觸點分別為a、c;激光傳感器與基準面距離為H;車子穩定在軌面時,與鋼軌面的接觸點間距約為ac≈L,L為小車前后排輪間距;傳感器位置為B,對應理想檢測點為坐標軸x0點,傳感器檢測值Bb1=g1(x0),滿足Bb1⊥ac,實際我們需要的檢測真值Bb0=g0(x0),則檢測誤差e=g1(x0)-g0(x0)。
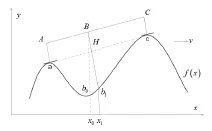
圖1 單點檢測示意圖
定義車體傾斜角Q為AC到X軸向的夾角,且滿足-0.5π<Q<0.5π,順時針為正。

于是我們有:
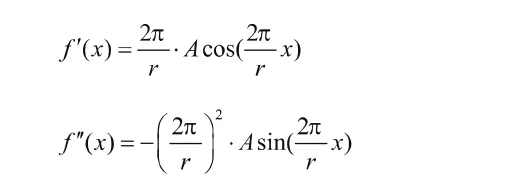
……
(1)當r≤p時,Q=0,理論上,檢測誤差e=0;
(2)當r>p時,


式中,Rn(x0)為x0的高階無窮小。
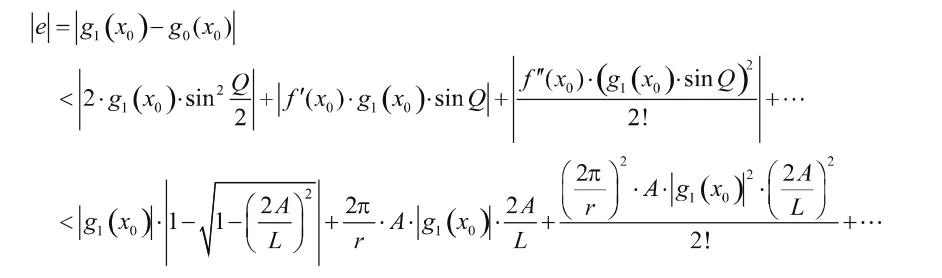
取H=15 mm,p=0.6 m,L=1 m,A=2 mm,
則有g1(x0)<H+2A=19 mm。

綜上所述,我們可以得出如下結論:
①由車體傾斜造成幅值誤差量約為2.124×10-3mm,相位誤差量約為1.27×10-4;
②增加排輪長度p,降低激光傳感器安裝高度H,可以更加有效地控制車體傾斜造成的檢測誤差。
2 軌道不平順波形波長對于檢測精度的影響
基于前述結論,我們討論不同波長條件下,軌道不平順檢測系統的檢測精度。即Q=0時,我們可分類推導得不同波長條件下,單點直接檢測的測量值函數:
(1)當r≤p時,g1(x0)=K
(2)當r>p時,設L=Nr+d,其中N=0,1,2…,0<d<r
①若r≤p+0.5d,g1(x0)=K
②若r>p+0.5d,
A、若r<p+d,設k=D-r,其中,D=2p+d,則有0<k<r
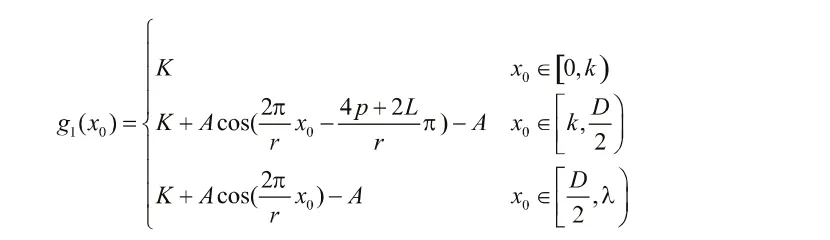
B、若r≥p+d,設D=2p+d=Mr+k,式中,M=0,1,0<k<r a、當M=0時,D=k

b、當M=1時,D=r+k

利用上述推導公式,我們進行仿真測試,探索不同波長條件下,軌道不平順檢測系統的檢測精度。如表1設置仿真參數(單位:m):

表1 檢測系統仿真參數
我們發現,該系統對不同波長的波的檢測精度是完全不同的。
1號、2號波的檢測誤差為0,而隨著波長的逐漸增加,檢測誤差總體上呈現增大的趨勢。這與我們的系統設計了排輪這種結構是能夠對應起來的。
重點比較誤差n的最大值,可以得到下面的結果。圖2中,橫坐標為不同波長的被檢測波編號,縱坐標為對應的誤差最大值。

圖2 各波長條件下n的值
我們可以得出如下的結論:
①檢測誤差隨著被檢測波波長的增大,總體呈增大趨勢,在波長最大的編號10的點達到最大值;
②檢測誤差隨著被檢測波波長的增大,存在2個極小值點:編號2和7兩點。存在1個極大值點,即編號4的點。此時n4=1.3778。并且當波長r<r2時,檢測誤差為0;
③檢測誤差隨著被檢測波波長的增大存在一個極限值,其極限誤差為2。
需要說明的是,軌道不平順波形實際上是一個由多種簡單波疊加而成的復合波。復合波形的測量精度可以認為是各種波形測量精度的疊加。再實際測量與波形修復的過程中時,我們可以通過先濾波,保留我們重點關注的波長范圍的波,再計算和進行波行復原,以提高檢測精度。
3 軌道不平順波形檢測系統的優化與改進
基于上述的精度分析結果,為了提高整個檢測系統的檢測精度,我們可以對軌道不平順波形檢測系統作如下的改進:
(1)減小激光傳感器距離基準面的高度H;
(2)適當增加排輪長度p;
(3)根據我們實際的測量需要,設定被檢測波的波長范圍,并以此調整排輪間距L;
(4)利用精度分析得到的數據,在波形復原的過程中,人為設定合理補償。
責任編輯:宋飛 龔佩毅
來稿時間:2015-4-13
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34