浮球式慣性平臺連續翻滾自標定自對準方法*
2015-03-09 01:22:20丁智堅楊華波連丁磊
國防科技大學學報 2015年3期
丁智堅,蔡 洪,楊華波,連丁磊
(1.國防科技大學航天科學與工程學院,湖南長沙410073;2.北京航天控制儀器研究所,北京100039)
浮球式慣性導航平臺系統(簡稱浮球平臺)相對于傳統框架式慣性平臺具有精度高、可靠性強、穩定性好和抗干擾能力突出等優勢,常被裝備于戰略武器型號(如“民兵Ⅲ”和“侏儒”等戰略導彈)[1-2]。不同于傳統框架式慣性平臺,浮球平臺是一種無框架支撐的靜壓液浮穩定平臺,慣性測量單元(Inertial Measurement Unit,IMU)安裝在一個球形穩定部件(內球)上,采用靜壓液浮支撐技術將內球穩定在一個大球(外球)殼內,以此隔離外界運動對內球的干擾,消除了動態條件下軸承之間的摩擦,改善了IMU的工作環境,提高了系統的測量精度[3]。作為制導、導航與控制(Guidance,Navigation and Control,GNC)系統的核心器件,浮球平臺的初始對準精度與測量水平關系到整個導彈的打擊精度。因此在導彈發射前,必須對浮球平臺進行標定與對準。
目前,慣性平臺的標定常采用多位置標定方法[4-5]。這種方法不需要外界其他設備提供基準信息,運算量小,但易引入器件的安裝誤差以及對準誤差等誤差因素,且該方法能夠標定的誤差系數的個數有限。關于靜基座下平臺慣導系統初始對準方法主要有基于經典控制理論的頻域法和基于現代控制理論的狀態空間法兩大類[6-7]。無論采用哪類方法,其初始對準的精度均受制于慣性器件的測量水平。由于這些方法將慣性平臺的標定與對準分開進行,使得二者之間相互影響,相互制約,因而無法滿足戰略武器的高精度要求[8]。
連續翻滾自標定自對準技術[9-16]是一種適用于慣性平臺系統的自標定自對準方法。該方法以當地重力矢量和地球自轉角速度信息為基準,通過框架系統控制臺體在1g重力場內連續翻滾,同時完成對平臺的標定與對準。文獻[9-16]針對慣性平臺連續翻滾自標定技術展開了深入的研究。但是這些研究都是針對框架式平臺系統,關于浮球平臺的研究較少。除此以外,大多數文獻以平臺失準角作為狀態量,建立失準角濾波方案。這種方法沒有考慮到大失準角的情況,且小角度的假設條件較為苛刻,當模型不準確或標定時間較長時容易導致濾波器發散。文獻[16]表明當失準角誤差超過0.05°時,失準角濾波方案將無法對平臺各項誤差系數進行有效的估計。
針對上述問題,以浮球平臺為研究對象,開展了浮球平臺連續翻滾自標定自對準的研究。仿真結果表明,利用本文所提的方法,陀螺誤差系數的標定精度可優于(1E-3)(°)/h,加速度計誤差系數的標定精度小于(1E-6)g,對準精度優于1″,滿足高精度戰略武器的精度要求。
1 浮球平臺姿態動力學模型
1.1 相應坐標系及相互關系
假設浮球平臺由三個三浮陀螺儀和三個石英加速度計組成,各儀表的安裝取向如圖1所示。
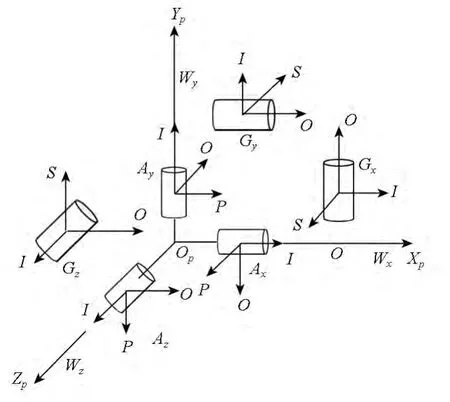
圖1 平臺幾何結構Fig.1 Platform geometry
與框架式平臺系統不同,浮球平臺的內球內并沒有六面體基準,本文以X石英加速度計的敏感軸為基準,建立內球坐標系,描述IMU與內球之間的安裝關系。
1)導航系(n系):以當地地理系作為導航坐標系,即“北-天-東”坐標系。
2)內球坐標系(p系):取內球幾何中心O為原點;OXP軸與X石英加速度計的敏感軸平行;OYP軸平行于X和Y石英加速度計的敏感軸所確定的平面,并與OXP軸垂直;OZP軸與OXP軸和OYP軸構成右手坐標系。
3)i(i=X,Y,Z)加速度計坐標系(ai系),坐標軸分別與i石英加速度計的I軸、P軸和O軸平行。根據定義可以看出X加速度計不存在安裝誤差,Y加速度計存在1個安裝誤差角,Z加速度計存在2個安裝誤差角。假設安裝誤差角均為小量,根據小角度假設理論,有
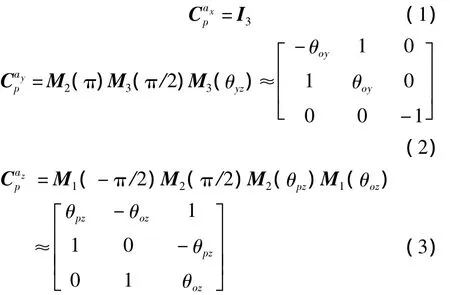
其中:I3為3階單位矩陣;M1,M2,M3分別為3個方向的姿態轉移矩陣。
4)加速度計敏感軸坐標系(as系),是非正交坐標系,其坐標軸與三個石英加速度計的敏感軸平行,與p系的關系如圖2所示。根據小角度假設理論,從p系到as系的轉換矩陣可寫為
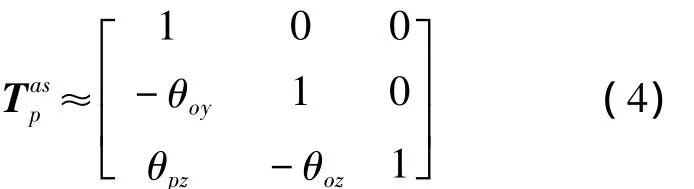
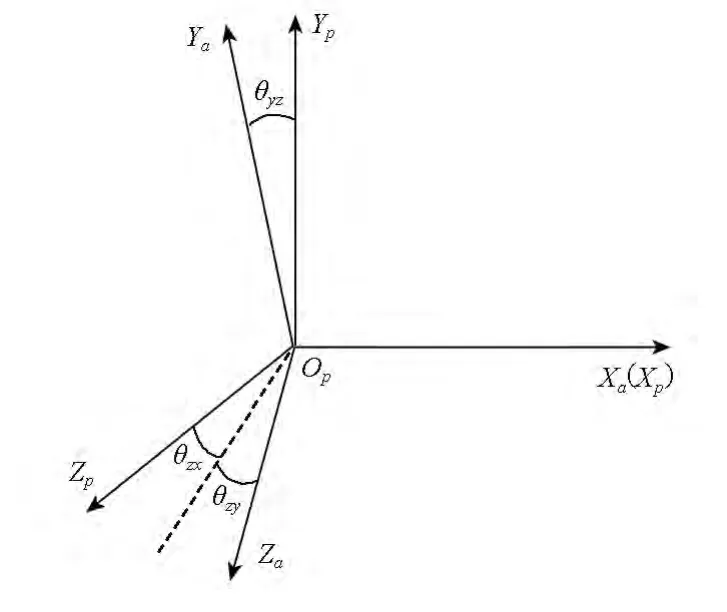
圖2 加速度計敏感軸坐標系Fig.2 Accelerometer sensitivity axis axes frame
5)i陀螺儀坐標系(gi系),坐標軸分別與i陀螺儀的I軸、O軸和S軸平行。由定義易知,每個陀螺儀存在兩個安裝誤差角(如圖3所示)。假設安裝誤差角為小量,根據小角度假設理論,有
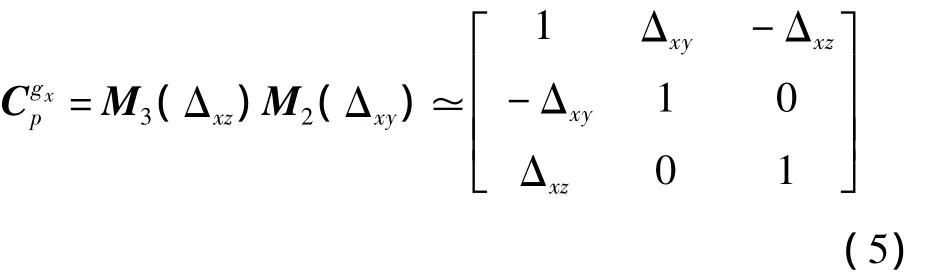
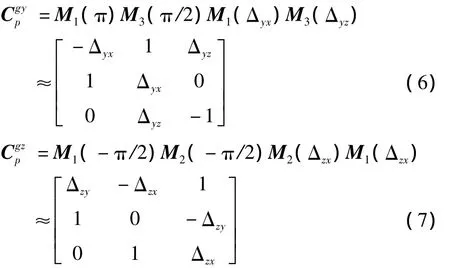
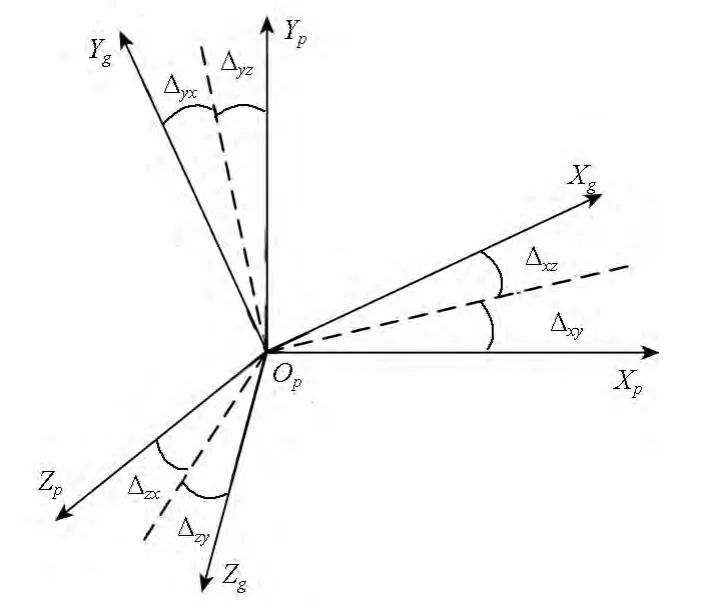
圖3 陀螺儀坐標系Fig.3 Gyroscope axes frame
6)陀螺儀敏感軸坐標系(gs系),是非正交坐標系,坐標軸與三個陀螺儀的敏感軸平行。根據小角度假設,從p系到gs系的轉換矩陣可寫為

此外,本文以常見的“321”轉序定義從p系到n系的歐拉角轉序,對應的歐拉角分別為γ,β,α,即:

1.2 慣性器件誤差模型
1)陀螺儀誤差模型。以X陀螺儀為例,目前最常用的陀螺儀靜態誤差模型為[17]
式中:εx表示X陀螺儀的靜態漂移;kg0x為陀螺儀零偏為陀螺儀一次項和kg33x為交叉項;nx表示零均值高斯白噪聲表示比力在X陀螺儀坐標系中的投影,即:

2)加速度計誤差模型。以X加速度計為例,其測量模型為[17]

式中:Ax為加速度計的輸出;ka0x為加速度計零偏;ka1x為加速度計刻度因子誤差;ka2x為加速度計二次項;νx為觀測噪聲;表示比力在X加速度計輸入軸的分量。
1.3 內球姿態動力學方程
根據歐拉動力學方程,有
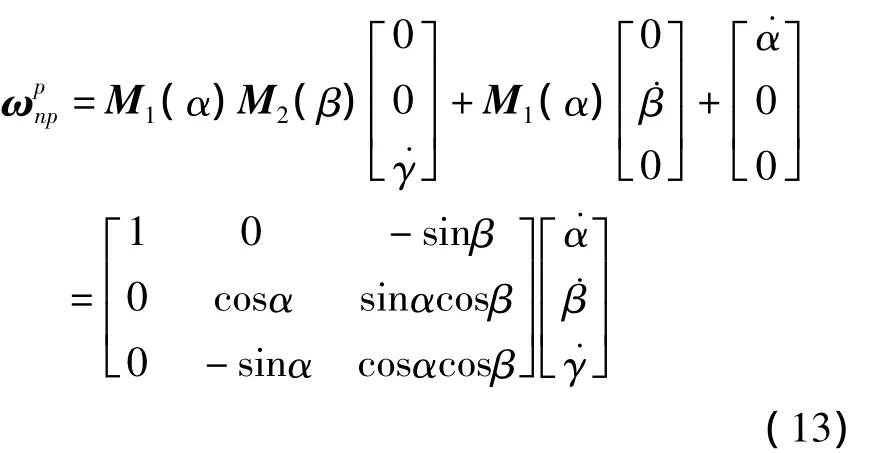
將式(13)改寫為
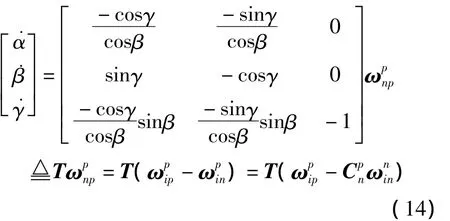
根據慣性平臺的工作原理[8],內球的絕對角運動主要由陀螺儀輸出信號和相應的穩定回路決定[3],主要包括指令角速度信息、陀螺儀漂移、穩定回路誤差等,即:

式中:εp表示陀螺儀的靜態漂移在p系下的投影;δωservo為由平臺穩定回路造成的不確定偏差;為指令角速度在p系下的投影。
考慮到平臺工作原理和陀螺儀的安裝誤差以及陀螺儀力矩器線性偏差,式(15)可寫為

式中:ε=[εxεyεz]T,εi由式(10)決定;K G為陀螺儀力矩器刻度因子。假設陀螺儀刻度因子只有線性偏差,即K G=I3+ΔK G,ΔK G為陀螺儀刻度因子誤差。
將式(16)代入式(14),有
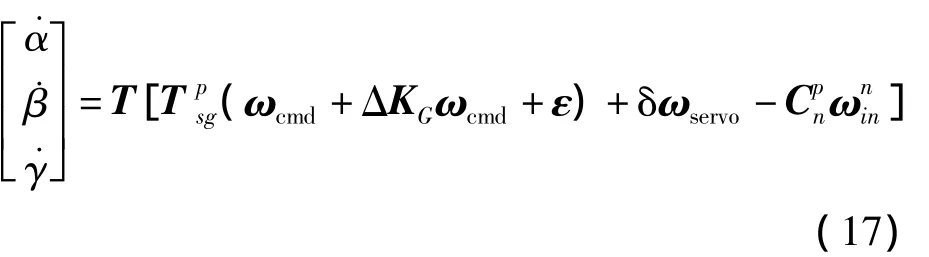
式(17)描述了內球相對于導航系的姿態角變化過程,其中陀螺儀漂移和指令角速度是引起內球絕對角運動的主要因素。
2 浮球平臺自標定自對準方案
從上一節姿態動力學的推導過程中可以看出,加速度計輸出中包含內球的姿態信息,而內球的姿態又與陀螺儀漂移相關。因此,可以將加速度計的輸出作為觀測量,通過Kalman濾波器估計出加速度計和陀螺儀的各項誤差系數及內球的姿態角信息。
2.1 濾波模型
選取陀螺儀各項誤差系數(包括陀螺儀零偏、一次項、交叉項和安裝誤差)、加速度計各項誤差系數(包含加速度計零次項、刻度因子偏差、二次項和安裝誤差)、陀螺儀力矩系數偏差以及浮球平臺姿態角作為系統狀態變量,即:

為了簡化濾波方程,忽略部分高階小量乘積,將式(17)改寫為
根據簡化后的浮球平臺姿態動力學方程式(19)和加速度計的輸出方程式(12),建立系統方程和觀測方程
與傳統失準角模型不一樣,所建的系統模型和觀測模型均為時變非線性模型。由于用姿態角代替了失準角,這種模型可以有效地避免由失準角過大導致模型失效的問題,增強了模型的真實性和魯棒性,減小了模型的偏差,但同時也增加了運算量。為了計算方便,采用擴展卡爾曼濾波(Extended Kalman Filter,EKF)非線性濾波算法辨識誤差系數。
2.2 施矩方案
1.2節中的IMU誤差模型反映了部分誤差系數的激勵大小與其所受的比力相關。為了保證所有誤差系數都可觀,必須設計合理的施矩方案,以確保p系的三個軸均有在1g重力場內翻滾的時間段,從而確保施矩方案能夠激勵出所有誤差系數。此外,合理的施矩方案不僅可以提高系統的可觀測性,而且可以加快誤差系數的收斂速度。
為了減小桿臂效應對加速度計輸出的影響,要求指令角速度不得太大。但過慢的轉速會降低陀螺力矩系數和陀螺儀安裝誤差角的可觀性,且會延長標定所需的時間。與此同時,為了簡化對平臺的操作,避免因多軸同時旋轉帶來的平臺“飛轉”,采取單軸依次旋轉的旋轉方案。此外,文獻[10]指出繞垂直于重力矢量方向的旋轉能夠最大限度地激勵慣導平臺各項誤差系數。考慮了上述的約束條件,本文采用的施矩方案如下:
Step1平臺歸零,與導航系統進行粗對準;
Step2以0.1(°)/s的速率繞地理南旋轉1800s;
Step3以0.1(°)/s的速率繞地理東旋轉900s;
Step4以0.1(°)/s的速率繞地理南旋轉1800s;
Step5以0.1(°)/s的速率繞地理東旋轉900s。
上述施矩方案能夠確保內球繞每個軸均轉動了180°左右,且所有的轉動均是在重力矢量平面內進行的。根據文獻[10]的結論,這種施矩方案具有較好的可觀性,且方便實驗員對內球的轉動直接地進行觀察,以便判斷內球是否按照設計軌跡旋轉。
2.3 系統可觀測性分析
對于非線性系統的可觀測性分析目前尚無成熟的理論可供參考。文獻[16]采用Lie導數和奇異值理論分析了系統的可觀測性。文獻[15-16]采用靈敏度方法分析了狀態參數的激勵特性。從理論角度來看,參數的激勵程度與參數的可觀測性不能一一對應,但能在一定程度上反應出參數的可觀測性。
由于所建立的濾波模型維數較高(45維),很難利用Lie導數計算系統的信息矩陣M。考慮到指令角速度較小,采樣周期較短(2ms),內球在采樣周期內姿態變化不大,故可認為系統在采樣周期內為線性定常系統。基于上述假設,利用分段線性定常系統(Piece Wise Constant System,PWCS)理論分析系統的可觀測性。結果表明,系統信息矩陣M的秩為45,與系統的維數相同,因此所設計的施矩方案是可觀的。
利用輸出靈敏度理論對誤差系數的激勵特性進行了分析,結果如圖4~7所示(限于篇幅,這里給出部分誤差系數的輸出靈敏度曲線)。
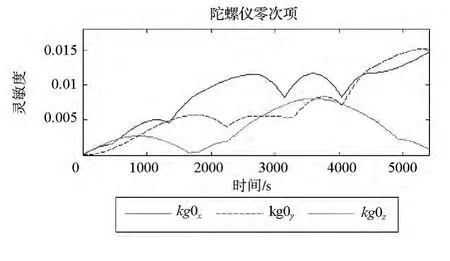
圖4 陀螺儀零偏的靈敏度曲線Fig.4 The sensitivity curves of gyroscope biases
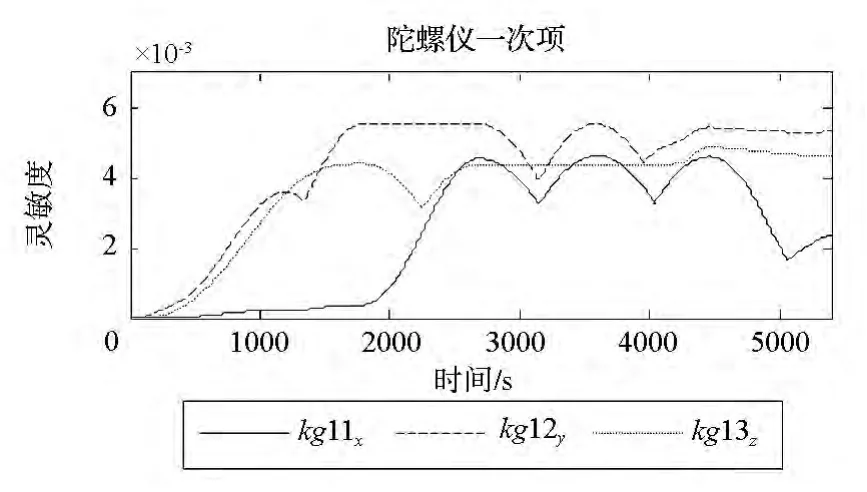
圖5 X陀螺儀一次項的靈敏度曲線Fig.5 The sensitivity curves for first items of X gyroscope

圖6 X陀螺儀安裝誤差項的靈敏度曲線Fig.6 The sensitivity curves for X gyroscope misalignments
從圖5~7中可以看出,不同誤差系數由于激勵大小存在差異,系數的輸出靈敏度不同,但是均有相對較高輸出靈敏度的時間段。這說明了所設計的施矩方案能夠確保所有誤差系數得到充分有效的激勵。
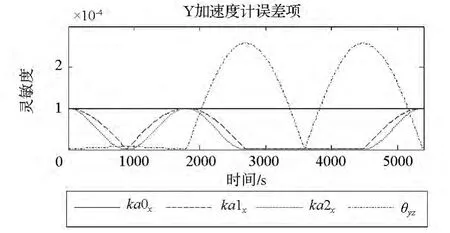
圖7 Y加速度計誤差項的靈敏度曲線Fig.7 The sensitivity curves for Y accelerometer error coefficients
此外,從式(20)中可以看出,指令角速度是激勵陀螺安裝誤差和陀螺力矩系數的主要因素。由于設計的指令角速度較小,因此,相對于其他參數,陀螺儀安裝誤差與陀螺力矩系數的可觀性較差。
3 仿真分析
3.1 仿真條件
誤差系數的仿真真值按照正態分布隨機生成,其均值與標準差如表1所示。其中姿態角單位為(°),陀螺儀零偏單位為(°)/h,一次項單位為(°)/(h·g),交叉項單位為(°)/(h·g2),所有安裝誤差單位為角秒,加速度計刻度因子誤差和陀螺力矩系數誤差單位為ppm,加速度計零偏單位為μg,加速度計二次項單位為μg2。如果不作特殊說明,后文采用相同的單位。
假設陀螺儀隨機漂移和加速度計測量噪聲均為零均值高斯白噪聲,其標準差分別為0.05(°)/h和1μg;系統采樣周期2ms,加矩指令周期1s,濾波周期0.2s;濾波變量初值為0。
加速度計桿臂矢量為
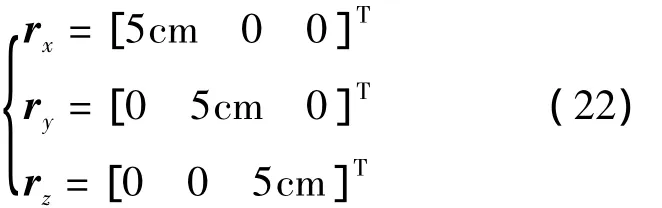
加速度計桿臂效應可以描述為
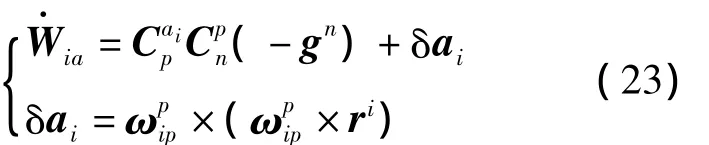
在仿真中,觀測值由式(9)、式(12)、式(17)與式(23)生成,濾波模型采用式(20)與式(21),所有積分過程采用4階龍格庫塔積分算法。
3.2 仿真結果與分析
為了驗證自標定與自對準方法的魯棒性,采用蒙特卡洛仿真。濾波初值均為0,其他參數根據慣性器件性能相應地設計。濾波結束后,取最后100s(此時濾波已經穩定)數據的平均值作為當次誤差系數標定的結果,對500次仿真的標定誤差與對準偏差進行統計分析,結果如表1所示。其中姿態角的估計偏差的單位為角秒。
從表1中可以看出,姿態角的估計偏差小于1″;陀螺儀零偏的估計偏差小于(1E-3)(°)/h;陀螺儀一次項估計偏差小于0.01(°)/(h·g);交叉項估計偏差小于0.005(°)/(h·g2);加速度計零偏估計偏差小于1μg;刻度因子估計偏差小于1ppm;二次項小于(1E-6)g;陀螺儀安裝誤差角估計偏差小于5″;加速度計安裝誤差角估計偏差小于0.1″;陀螺儀力矩系數估計偏差小于5ppm。各項誤差系數估計偏差的標準差與估計偏差均值大小量級一致。此外,從仿真結果還可以看出,加速度計的誤差系數估計效果是最好的,這是由于加速度計輸出作為觀測值,使得加速度計的誤差系數可觀性較強引起的。對比陀螺儀安裝誤差和陀螺力矩系數與其他參數的估計效果可以看出,陀螺儀安裝誤差和陀螺力矩系數估計效果相對較差,這與之前的可觀性分析結果一致。另外,從姿態角的跟蹤結果中可以看出,姿態角濾波方案能在初始姿態最大誤差角為5°條件下實現對慣性平臺的有效標定,減輕了標定對初始條件的依賴。上述仿真結果充分地驗證了本文所提的自標定自對準方法的穩定性和有效性。
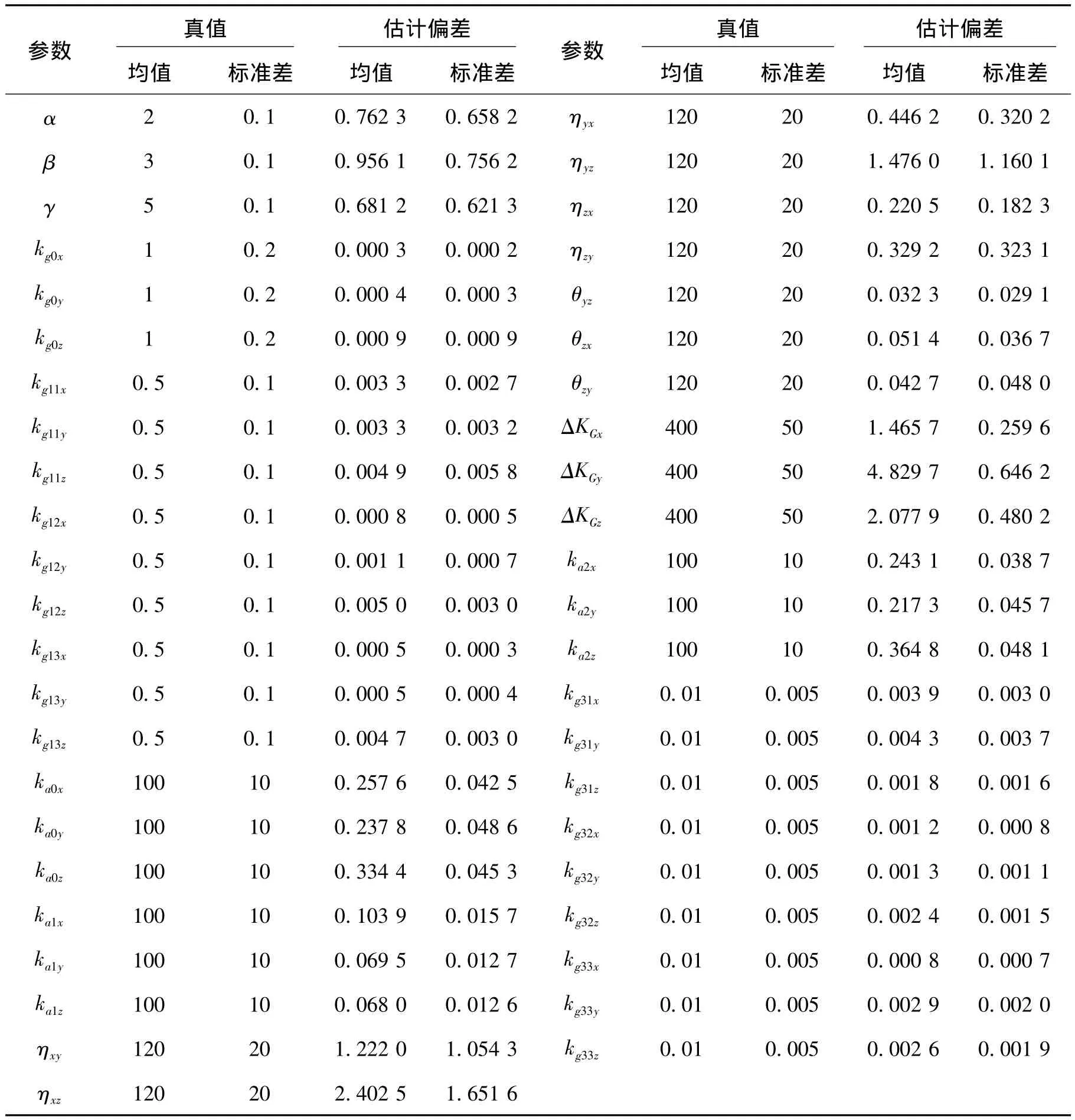
表1 狀態初值與仿真結果Tab.1 Initial state values and simulation results
4 結論
針對浮球平臺的自標定與自對準問題,提出了一種基于內球姿態角的自標定自對準方法。該方法能同時標定出42項平臺誤差系數并實現平臺初始對準。仿真結果表明,利用該方法陀螺儀的標定精度小于5E-3,加速度計標定精度優于1E-6,姿態角對準精度高于1″。相對于傳統的平臺標定與初始對準方法,該方法適用于浮球平臺的高精度標定和初始對準,整個過程無須外界設備提供輔助信息,標定與對準的精度較高,是一種具有良好工程應用前景的自標定與自對準方法。
References)
[1]Hanching G W,Thomas C W.High-accuracy inertial stabilized platform for hostile[J].IEEE Control Systems,2008,2:65-85.
[2]張宗美.浮球平臺[J].導彈與航天器運載技術,1991,4:1-22.ZHANG Zongmei.Floated inertial platform[J].Missile and Space Vehicles,1991,4:1-22.(in Chinese)
[3]李安梁,蔡洪,白錫斌.浮球式慣導平臺的自適應模糊滑模穩定控制[J].國防科技大學學報,2013,35(6):41-45.LI Anliang,CAI Hong,BAI Xibin.Adaptive fuzzy sliding mode stabilization control for floated inertial platform[J].Journal of National University of Defense Technology,2013,35(6):41-45.(in Chinese)
[4]包為民,申功勛,李華濱.慣性平臺在系統中多位置翻滾自標定方法[J].北京航空航天大學學報,2011,37(4):462-465.BAO Weimin,SHEN Gongxun,LI Huabin.Investigation on inertial platform multi-position rolling self-calibration[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(4):462-465.(in Chinese)
[5]楊華波,蔡洪,張士峰.高精度慣性平臺誤差自標定方法[J].上海航天,2006,23(2):33-36.YANG Huabo,CAI Hong,ZHANG Shifeng.Calibration for the errors of a high accurate inertial platform[J].Aerospace Shanghai,2006,23(2):33-36.(in Chinese)
[6]Grewal M S,Henderson V D,Miyasako R S.Application of Kalman filtering to the calibration and alignment of inertial navigation systems[J].IEEE Transactions on Automatic Control,1991,36(l):4-13.
[7]萬德鈞,房建成.慣性導航初始對準[M].南京:東南大學出版社,1995:36-45.WAN Dejun,FANG Jiancheng.Initial alignment of inertial navigation[M].Nanjing:Southeast University Press,1990:36-45.(in Chinese)
[8]陸元九.慣性器件[M].北京:中國宇航出版社,1993:369-437.LU Yuanjiu.Inertial sensors[M].Beijing:China Astronautics Publishing House,1993:369-437.(in Chinese)
[9]Andrew D J.Continuous calibration and alignment techniques for an all-attitude inertial platform[C].AIAA Guidance and Control Conference,Key Biscayne,Florida,USA,1973.
[10]Sifter D J,Henderson V D.An advanced software mechanization for calibration and alignment of the advanced inertial reference sphere[C]//Proceedings of 8th Guidance Test Symposium,Holloman Air Force Base,New Mexico,USA,1977.
[11]楊華波,蔡洪,張士峰,等.高精度慣性平臺連續自標定自對準技術[J].宇航學報,2006,27(4):600-604.YANG Huabo,CAI hong,ZHANG Shifeng,et al.Continuous calibration and alignment techniques for a high precision inertial platform[J].Journal of Astronautics,2006,27(4):600-604.(in Chinese)
[12]Strunce R R.Calibration and alignment studies[R].AIAA 0173-11433,Florida,1973,7:56-78.
[13]曹淵,張士峰,楊華波,等.慣導平臺誤差快速自標定方法研究[J].宇航學報,2011,32(6):1281-1287.CAO Yuan,ZHANG Shifeng,YANG Huabo,et al.Research on rapid self-calibration method for inertial platform[J].Journal of Astronautics,2011,32(6):1281-1287.(in Chinese)
[14]Hellings F J.Application of extended Kalman filtering to a dynamic laboratory calibration of an inertial navigation system[R].Aerospace Corp el Segundo ca Engineering Science Operations,1973.
[15]曹淵,張士峰,楊華波,等.一種新的慣性平臺快速連續旋轉自對準方法[J].兵工學報,2011,32(12):1468-1473.CAO Yuan,ZHANG Shifeng,YANG Huabo,et al.Fast selfalignment method for inertial platform through continuous rotation[J].Acta Armamentarii,2011,32(12):1468-1473.(in Chinese)
[16]Cao Y,Cai H,Zhang S F,et al.A new continuous selfcalibration scheme for a gimbaled inertial measurement unit[J].Measurement Science and Technology,2012,23(1):385-394.
[17]Titterton D H,Weston J L.Strapdown inertial navigation technology[M].2nd ed.UK:the Institution of Engineering and Technology,2004:41-128.