基于多普勒輔助的慣性/衛星深組合技術研究
2015-03-10 07:01:18葛文濤陳安升
導航定位與授時 2015年6期
薛 濤,王 康,葛文濤,李 偉,陳安升
(北京自動化控制設備研究所,北京100074)
?
基于多普勒輔助的慣性/衛星深組合技術研究
薛 濤,王 康,葛文濤,李 偉,陳安升
(北京自動化控制設備研究所,北京100074)
針對高動態、強干擾環境下高精度組合導航應用需求,基于衛星導航環路誤差模型,仿真分析了不同精度等級慣性輔助對環路的影響,量化分析了多普勒輔助對環路性能的提升效果;給出了多普勒輔助環路實現方法,結合衛星導航環路處理流程,提出了多普勒速度輔助環路實現方案;基于高動態軌跡進行了仿真實驗,結果表明,基于多普勒輔助的慣性/衛星深組合技術能夠有效提升環路高動態跟蹤能力,在慣性信息輔助下,能夠實現在25g/s加加速度、50g加速度高動態環境下對衛星信號的穩定跟蹤。
多普勒輔助;深組合;高動態;抗干擾
0 引言
基于位置/速度、偽距/偽距率的慣性/衛星松散組合、緊組合技術,已經在航空、航天、航海以及陸用導航領域得到了廣泛應用。但這兩種組合方式受制于衛星信號跟蹤環路的基本原理,在高動態、強干擾環境下無法實現對衛星信號的快速捕獲和穩定跟蹤,不能滿足未來復雜戰場高強度對抗應用需求。慣性/衛星深組合技術打破了傳統慣性/衛星組合導航的設計思路,將慣性信息引入衛星導航跟蹤環路,實現高動態適應性和抗干擾能力的大幅提升,是滿足武器裝備應用需求的重要手段。與傳統松組合、緊組合模式相比,深組合系統工作過程更加復雜,信息交互更加深入,不同層次的慣性/衛星組合示意圖如圖1所示。
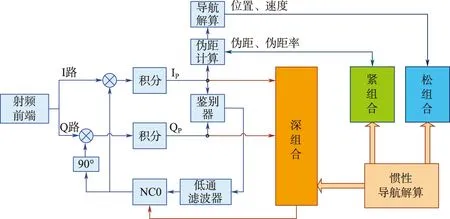
圖1 不同層次的慣性/衛星組合示意圖Fig.1 Different levels of inertial/satellite Integration
自20世紀90年代后期美國Draper實驗室針對制導炮彈對GPS抗干擾能力的要求開展深組合技術研究以來,國內外眾多研究機構對該技術開展了深入研究。目前,美國IGS公司和CRS公司、NAVSYS公司、斯坦福大學等多個研究機構已經開發出了相關產品,部分已實現工程應用。國內在深組合技術方面起步較晚,尚處于研究階段。根據信息融合程度、輔助形式等的不同,深組合技術有多種實現方案,本文從慣性輔助下衛星導航環路誤差模型入手,針對基于多普勒輔助的深組合技術性能開展深入分析與仿真驗證,為相關技術研究與應用提供支撐。
1 慣性多普勒輔助深組合技術優勢分析
1.1 衛星導航載波跟蹤環路誤差分析
載波跟蹤環路性能是影響衛星導航高動態、抗干擾性能的關鍵。在不考慮電離層噪聲等影響的前提下,載波跟蹤環路的跟蹤誤差主要由載體動態導致的動態應力誤差以及熱噪聲引入的誤差組成
(1)
其中,σtPLL為熱噪聲,σv振動引入的相位噪聲,θA為阿倫均方差,θe為動態應力誤差。
熱噪聲大小影響主要取決于環路帶寬與信號的載噪比[1],可以表示為
(2)
其中,Bn表示環路噪聲帶寬(Hz),C/N0表示載噪比(dB/Hz),T表示預檢測積分時間(s)。
由振動引起的振蕩器相位噪聲表示為
(3)
其中,fL為L頻段的輸入頻率,fm為隨機振動的調制頻率,sv(fm)為fm函數的振蕩器振動靈敏度,P(fm)為fm函數的隨機振動的功率曲率。
阿倫均方差一般為經驗公式,對于三階鎖相環,表示為
(4)
其中,σA(τ)為振蕩器短期穩定度的阿倫方差。
動態應力誤差的影響誤差主要取決于環路的帶寬和階數,對于三階環路,動態應力誤差可以表示為
(5)
不同信噪比下的無輔助三階環路跟蹤性能曲線如圖2所示。以載噪比35dB/Hz(正常室外信號較低水平)為例,測得環路最優帶寬約為25Hz,最小跟蹤誤差約為7°。
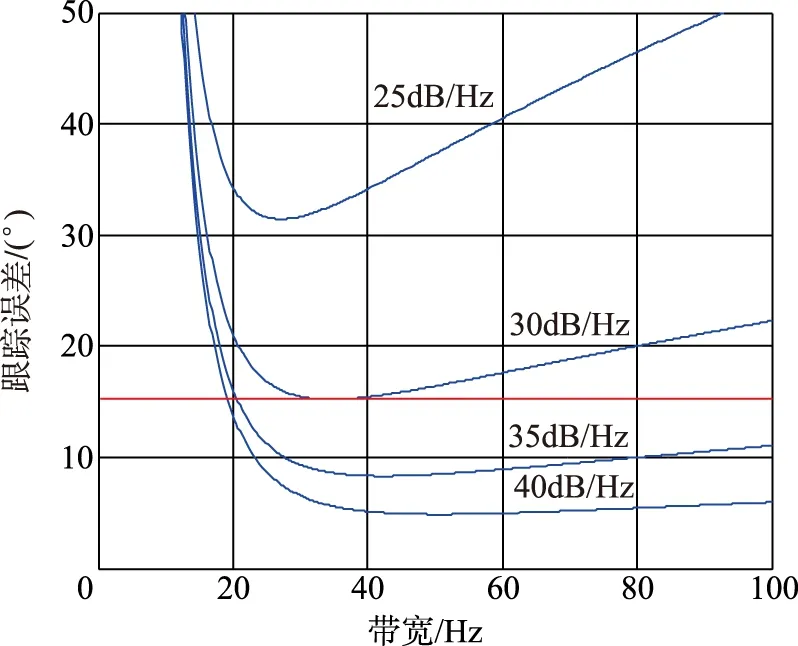
圖2 三階環路跟蹤性能曲線Fig.2 Curve of three-order loop in tracking capability
1.2 不同精度等級慣性輔助性能分析
基于多普勒輔助的衛星跟蹤環路架構如圖3所示,利用修正后的慣性信息實時計算多普勒頻移,并轉換為載波NCO修正量,補償到載波NCO中。
當采用慣性多普勒輔助環路時,載體的動態基本上能夠由慣性信息補償,動態應力誤差轉化為慣性器件的誤差[2]
(6)
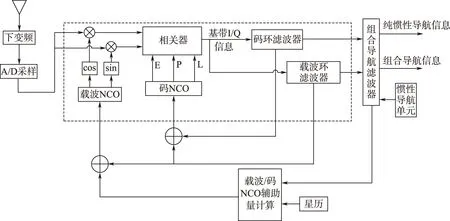
圖3 基于慣性輔助的衛星跟蹤環路架構圖Fig.3 Architecture of the satellite tracking loop based on inertial assistance
慣性器件誤差與載體速度誤差之間的關系為[3]
(7)
其中,ΔV為載體速度誤差,δV為載體速度誤差變化率,B為加表的零偏,D為陀螺的漂移,g為重力加速度,α(0)為初始姿態角誤差。
由式(6)和式(7)可以看出,慣性器件的精度水平影響跟蹤誤差的大小。不同精度水平慣性輔助下深組合環路跟蹤靈敏度如圖4所示。
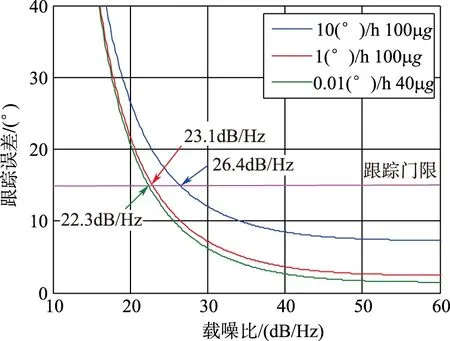
圖4 不同精度水平慣性輔助下深組合環路跟蹤靈敏度Fig.4 Tracking sensitivity of deep integration loop aided by different inertial level
由圖4可知,在同一載噪比的條件下,慣性器件精度越高,跟蹤誤差越小;在同一跟蹤誤差門限的條件下,慣性器件精度越高,環路跟蹤靈敏度越高。下文對慣性多普勒輔助下環路性能進行分析仿真。
1.3 跟蹤能力分析
對于載波跟蹤環路而言,環路帶寬越大,對高動態跟蹤能力的提升越大。而對于慣性多普勒輔助的深組合環路,載體動態性能可由修正后的慣性信息實時精確估計,從而降低高動態性能對環路帶寬的依賴性[4]。
下面通過仿真來說明慣性多普勒輔助對環路動態性能的提升。設定跟蹤載噪比為35dB/Hz的信號,載體加加速度設為10g/s,相關積分時間為1ms。圖5為高動態條件下有無輔助環路跟蹤性能的對比曲線。
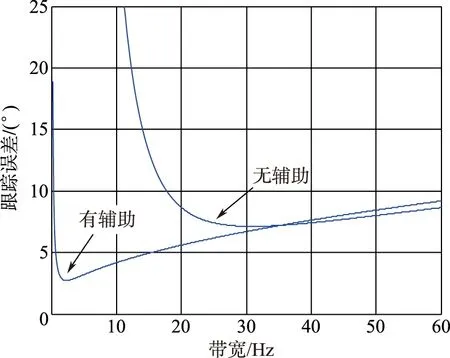
圖5 環路跟蹤性能對比曲線Fig.5 Comparative curve of theloop in tracking capability
由圖5可知,慣性多普勒輔助環路最優帶寬為3Hz,跟蹤誤差約為3°;無輔助環路最優帶寬為25Hz,跟蹤誤差約為7°。在慣性輔助下,環路帶寬壓縮約88%,跟蹤誤差降低約57%。由此說明,相比普通環路,基于多普勒輔助的深組合技術可大幅度降低帶寬和跟蹤誤差,顯著提升高動態跟蹤能力。
1.4 抗干擾能力分析
在1.3節分析的基礎上,圖6給出了最優帶寬條件下(有輔助為3Hz,無輔助為25Hz),有無輔助環路跟蹤誤差與信號載噪比關系曲線,相關積分時間為1ms。
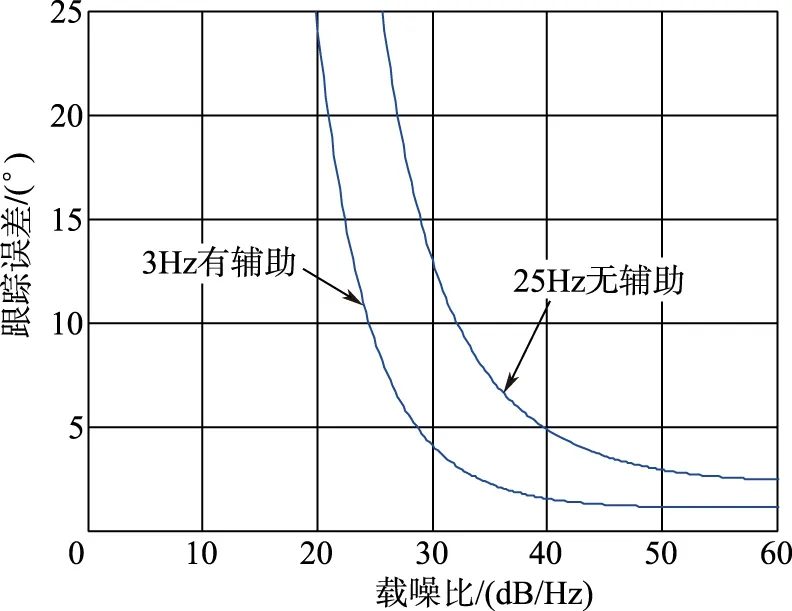
圖6 跟蹤誤差與信噪比關系曲線Fig.6 Curve of the tracking error and SNR
曲線與15°門限的交點對應的載噪比,即該帶寬環路能夠跟蹤的最低信號載噪比值。從圖6中可以看出,有輔助的最低信號載噪比值約為24dB/Hz,無輔助的最低信號載噪比值約為32dB/Hz。由此可見,慣性多普勒輔助使得環路在壓縮帶寬的同時,還能夠跟蹤載噪比更低的信號,提升了環路跟蹤靈敏度。
干擾與信號功率比J/S與載噪比的關系為
(8)
其中,(C/N0)eq為干擾出現時等價的載噪比,C/N0為無干擾時信號的載噪比,fc為碼速率,P為調整系數(窄帶干擾為1,寬帶干擾為2)。
在GPS系統中,以100W功率干擾源為例,根據式(8)得到有無慣性輔助條件下抗干擾性能,如表1所示。
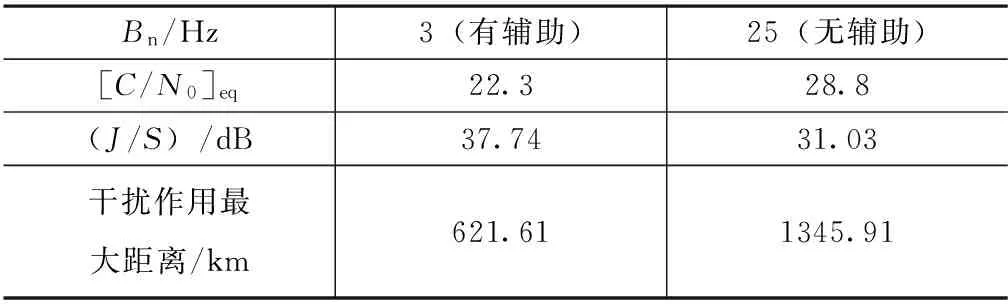
表1 不同帶寬抗干擾能力表Tab.1 Anti-jamming capability of different bandwidth
由表1可以看出,追蹤同一信號,在最優帶寬的條件下,有輔助環路比無輔助環路抗干擾性能提升約6.7dB,干擾源干擾作用最大距離壓縮了約54%。
2 慣性多普勒輔助深組合環路方案設計
根據輔助實現形式的不同,慣性多普勒輔助深組合環路可分為速度輔助和加速度輔助兩種方式[5]。
2.1 速度輔助
速度輔助是利用組合修正后的慣性導航位置與外部星歷信息計算接收機與衛星之間視線方向上的單位矢量,基于慣性速度和加速度信息推算下一時刻多普勒頻移,并估計本地載波頻率,以此作為跟蹤環路中心頻率來輔助對載波環路的跟蹤。
(9)

計算載體和i通道衛星相對速度在徑向方向上的投影為
(10)

下一時刻i通道多普勒頻移為
(11)
其中,fIF為GPS信號L1波段載波頻率,C為光速。
在此基礎上得到本地載波中心頻率為
(12)
將這一頻率作為下一時刻NCO的中心頻率,從而起到輔助跟蹤環路的作用。但載波環路不僅要求本地載波頻率和輸入信號載波頻率相等,而且要求兩者的相位相等。由于慣性速度和加速度本來就存在誤差,因此將f作為載波環路的中心頻率,而不能直接用f作為下一時刻的本地載波頻率。
2.2 加速度輔助
加速度輔助是指根據慣性加速度信息,預測出下一時刻輸入信號載波頻率的變化量,并將其直接補償到本地載波的輸出,從而消除環路動態應力。
(13)
在此基礎上得到載體相對于衛星的加速度為
(14)
衛星信號多普勒頻移的增量為
(15)
加速度輔助模式下應用輔助信息時,將估算出的各通道多普勒頻移增量加至相應通道載波跟蹤環路NCO的中心頻率上,用作下一時刻載波頻率產生的基準,即可起到對跟蹤環路輔助的作用。
2.3 速度輔助環路詳細處理方案
速度輔助與加速度輔助本質上都是利用慣性動態信息補償環路動態應力誤差,本節以速度輔助為例,給出慣性信息參與下環路處理方案。
普通接收機由捕獲轉到跟蹤狀態后,對環路基準頻率進行一次修正,記修正后的環路頻率為fBase,NCO頻率調整量fNCOi進行累加運算,則環路更新時刻環路頻率表示為fBase+∑fNCOi,環路頻率更新如圖7所示。
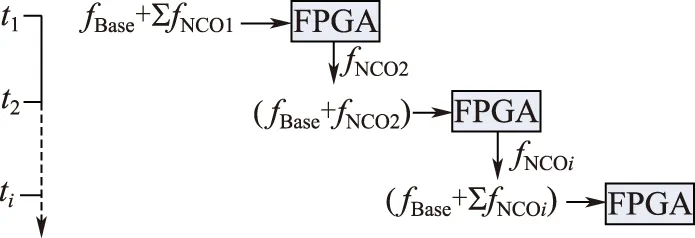
圖7 普通環路頻率變化過程Fig.7 Changing process of thefrequency of the normal loop
在速度輔助模式下,通過載體與衛星的相對速度計算得到載波多普勒頻移,記為fdop,在此基礎上得到跟蹤環路頻率,記為f=fIF+fdop,其中,fIF為衛星跟蹤環路中頻頻率。在具體實現過程中,處理方法如下。
接收機在收到輔助頻率信息f后,設置跟蹤環路基準頻率為f,環路NCO累加值清零,后續更新時刻環路NCO頻率進行累加,環路頻率為f+∑fNCOi。在下一個慣性輔助頻率到來后,重新設置環路基準頻率,環路NCO清零,重復此過程。由此便可完成環路頻率的更新,環路頻率變化過程如圖8所示。

圖8 速度輔助環路頻率變化過程Fig.8 Changing process of thefrequency of the loop aided by speed
3 試驗與結果分析
在對慣性多普勒輔助深組合技術優勢和環路處理方案進行研究的基礎上,本章針對無輔助環路和速度輔助環路進行了仿真試驗。設計高動態軌跡如表2所示。

表2 動態軌跡表Tab.2 Dynamic track table
仿真實驗采用陀螺漂移為0.01(°)/h、加速度計零偏40μg的慣性器件,輔助環路周期為1ms(按式(9)推算得到1ms周期的速度信息),環路帶寬為3Hz,無輔助環路帶寬為25Hz,衛星信號載噪比設置為35dB/Hz。
圖9和圖11分別給出了無輔助環路通道和速度輔助環路通道的I_P值(同相支路的即時碼相關積分值)。
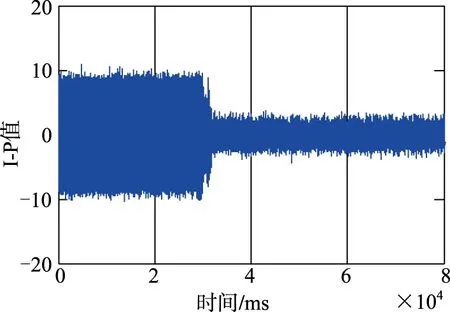
圖9 無輔助環路通道I_P值Fig.9 IP value in the channel of the normal loop
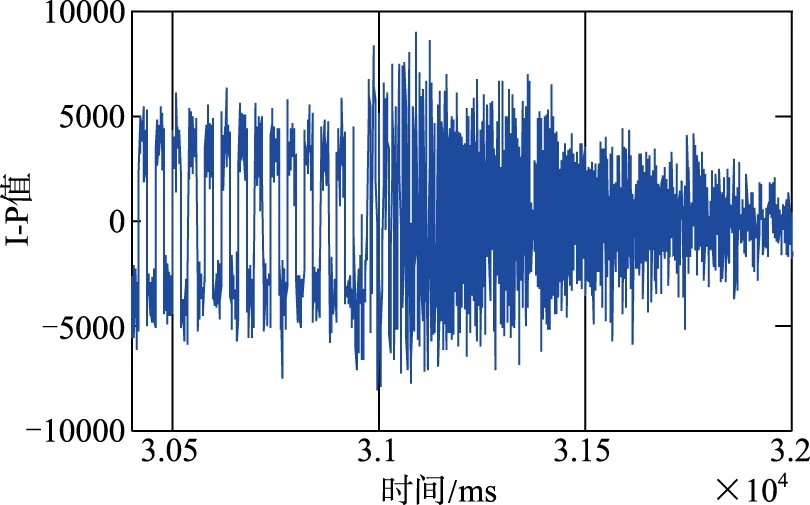
圖10 局部放大圖(圖9)Fig.10 Enlarged view of figure 9
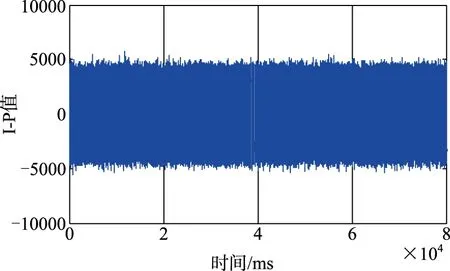
圖11 速度輔助環路通道I_P值Fig.11 IP value in the channel of the loop aided by speed
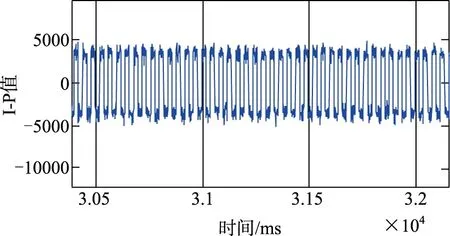
圖12 局部放大圖(圖11)Fig.12 Enlarged view of figure 11

圖13 多普勒頻率及加速度變化曲線Fig.13 Changing curve of theacceleration and the frequency of Doppler
由圖13中曲線可以看出,在上述仿真條件下,當載體加速度增加到一定程度時(約40g),無輔助環路開始失鎖,無法維持對信號的可靠跟蹤,而速度輔助環路則一直保持對輸入信號的精確相關,多普勒頻率隨載體速度變化穩定更新,可在25g/s加加速度、50g加速度、2450m/s速度的動態條件下實現穩定跟蹤。
4 結論
本文基于衛星導航載波跟蹤環路誤差模型,仿真分析了不同精度等級慣性輔助對環路的影響,量化分析了慣性多普勒輔助對環路性能的提升效果;在此基礎上給出了兩種慣性輔助環路方法,結合衛星導航環路處理流程提出了速度輔助環路實現方案。結果表明,在文中仿真條件下,慣性多普勒輔助技術能夠實現在25g/s加加速度、50g加速度高動態環境下對衛星信號的穩定跟蹤。
后續將在理論分析的基礎上,開展慣性輔助載波跟蹤環路高動態跟蹤能力和抗干擾能力跑車試驗驗證,為深組合技術研究與應用提供支撐。
[1] 謝鋼.GPS原理與接收機設計[M].電子工業出版社,2009.7.
[2] 唐康華,吳美平,胡小平.MEMS +IMU輔助的高性能GPS接收機設計[J].測繪學報,2008,37(1):129-131.
[3] Kreyec,Eisssfellerb,Ameresg.Architectures of GNSS/INS Integrations-theoretical Approach and Practical Tests[EB/OL].http://forschung.unibw-muenchen.de/papers/gawoe8szerl4vfleb015xj038yybw.pdf,2004-09-20.
[4] HUAN Hao,ZHAO Yu-mei,TAO Ran,WANG Gui-ying. Ca-rrier tracking loop for high-dynamic spread spectrum signals aided by estimation of Doppler rate[A].ICSP2012 Proceedings[C].Guangxi,2012,1378-1383.
[5] Moon Suk Koo,Hyun-min Ji,Deok Won Lim,Sang Heon Oh,Dong-Hwan-Hwang.NCO command generator design for the ultra-tightly coupled GPSINS integrated navigation system method[A].Proceedings of 11th International Conference on Control,Automation and Systems[C].Korea,2011,1626-1630.
Research on Deep Integration of Inertial/Satellite Technology Based on Doppler Assistance
XUE Tao,WANG Kang,GE Wen-tao,LI Wei,CHEN An-sheng
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
To satisfy the requirements of the applications of the high-accuracy navigation,the effects of different accuracy classes of the inertial assistance to the loop were simulated,which based on the loop error model of the satellite navigation.It was quantifiably analysed that the upgrade effect of the loop which aided by Doppler.Also,the implement method of Doppler assistance was given and the scheme for implementation of the loop which aided by speed was proposed in conjunction with the process of the loop of the satellite navigation.Simulation experiment was proceeded which based on high dynamic trajectory.The results showed that the deep integration of inertial/satellite technology,which aided by Doppler,can effectively improve the capability of the loop on high dynamic tracking.And with the assistance of the inertial information,the signal of the satellite can be stably tracked in the high dynamic environment of 25g/s jerk and 50gacceleration.
Doppler assistance;Deep integration;High dynamic;Anti-jamming
2015 - 09 - 22;
2015 - 10 - 20。
薛濤(1990 - ),男,碩士,助理工程師,主要從事組合導航技術研究。
E-mail:xuetao925@nuaa.edu.cn
TP391
A
2095-8110(2015)06-0025-07
