廣州地鐵5號線AATTOO操縱節能優化研究和試驗對比
2015-03-10 05:39:53王鵬
現代城市軌道交通 2015年1期
關鍵詞:節能
王 鵬
廣州地鐵5號線AATTOO操縱節能優化研究和試驗對比
王 鵬
摘 要:廣州地鐵5號線為直線電機系統,結合直線電機運行效率不高、能量損耗大以及直線電機線路坡道大且多的特點,通過優化ATO操縱方式達到節能降耗的目的。并進行了能耗試驗對比,節能效果良好。
關鍵詞:直線電機;列車運行;節能;操縱策略;能耗對比試驗
王 鵬:廣州市地下鐵道總公司,碩士,廣東廣州 510000
0 引言
直線電機車輛運載系統是20世紀90年代以后開始商業運營的。直線電機車輛具有爬坡能力強、轉彎半徑小、噪聲低、斷面小等優點。可以克服城市選線中的諸多困難,可輕松穿越既有線路、江、河,可方便地繞過建筑物。適用于地勢起伏大、地形復雜的城市或地區。
由于直線電機的特殊結構,在車輛同等質量下,直線電機車輛的牽引能耗相對旋轉電機車輛高。根據理論計算和試驗測試結果,直線電機車輛的牽引能耗(單位人公里能耗)相對旋轉電機車輛高30%左右[1]。因此,在發揮直線電機車輛運載系統優勢的基礎上,如何降低能耗,是直線電機車輛系統的一個重要研究課題。
1 列車自動運行(ATO)模式分析
廣州地鐵5號線的ATO操縱模式,每個區間都基本相似。只是受各區間的線路長度、曲線大小等影響,每個區間的限速和列車的最高速度會有所不同。列車從站臺啟動出發,依次經歷加速階段、平穩運行階段、制動階段,在下一站臺對標停穩。
在平穩運行階段,列車基本保持恒速運行。但是實際上,不可能保持速度不變,只是限制在較小的范圍內波動。為保持恒速,ATO一般只施加較小的牽引力用于克服列車的阻力。如果出現速度過快的情況,就變為惰行或者制動狀態,來使列車保持恒速。但是此種控制方式不太符合直線電機牽引系統的特點,會造成一定能量的浪費,其原因如下。
首先,直線電機氣隙一般為9~12 mm(而旋轉電機的氣隙只有1 ~2 mm),再加上直線電機是有端部的(旋轉電機是閉環),漏磁場較大,機電能量轉化率低。所以,直線電機相對于旋轉電機,效率和功率因數都較低,效率一般在0.7~0.8之間,功率因數一般在0.5~0.6之間[2]。而且在較低牽引力的情況下,直線電機的效率和功率因數會進一步降低。現有平穩運行階段,為保持列車恒速而使直線電機牽引系統長時間工作在較低工作效率的情況下,并不經濟。
其次,由于直線電機列車具有不受粘著的限制、爬坡能力強的特點,通常所設計的直線電機系統線路,坡道往往較多且較大(正線最大坡道5%)。當列車處于下坡時,重力的斜向分力如果大于阻力,列車速度會越來越大,ATO為使列車保持恒速,必須進行間歇制動或者持續制動。由于直線電機電制動轉化效率同樣較低,坡道的勢能將得不到有效利用,實際上同樣增大了系統的能耗。
再次,直線電機由于電感較大,勵磁電流較大,勵磁時間也較長,系統響應因而較慢。當從加速階段向平穩運行階段轉換過程中,系統響應慢,容易造成列車速度過快,必須進行制動來使速度恢復穩定,整個過程增大了能耗。在平穩運行階段,控制滯后也使系統容易受外部因素的干擾(例如坡道、彎道等),列車將由牽引狀態短暫地變為制動狀態,因而增大了能耗。
因此,考慮在平穩運行階段列車的控制方式采用惰行與100%牽引間斷操作,如圖1所示,將更加適合直線電機系統特性,從而系統性地降低能耗。在此種方式中,平穩運行階段,牽引狀態的牽引力是100%,使直線電機工作在最大的效率和功率因數上,可提高牽引利用率。惰行和牽引間斷操作,實際上是增大了速度的波動范圍,將降低系統對坡道影響的敏感性,能更多地將坡道的勢能轉化為動能,而不是將勢能消耗在制動上。惰行與牽引間斷操作,使控制方式更為簡單,能夠很好地避免系統響應慢的問題。

圖1 平穩運行階段采用惰行與100%牽引間斷操作的方式
2 節能試驗
針對ATO模式分析提出列車節能操作建議,通過現場試驗,驗證其節能效果。

圖2 魚珠—大沙地列車ATO運行曲線(紫色曲線為列車速度,青色曲線為牽引/制動指令值0~100%)
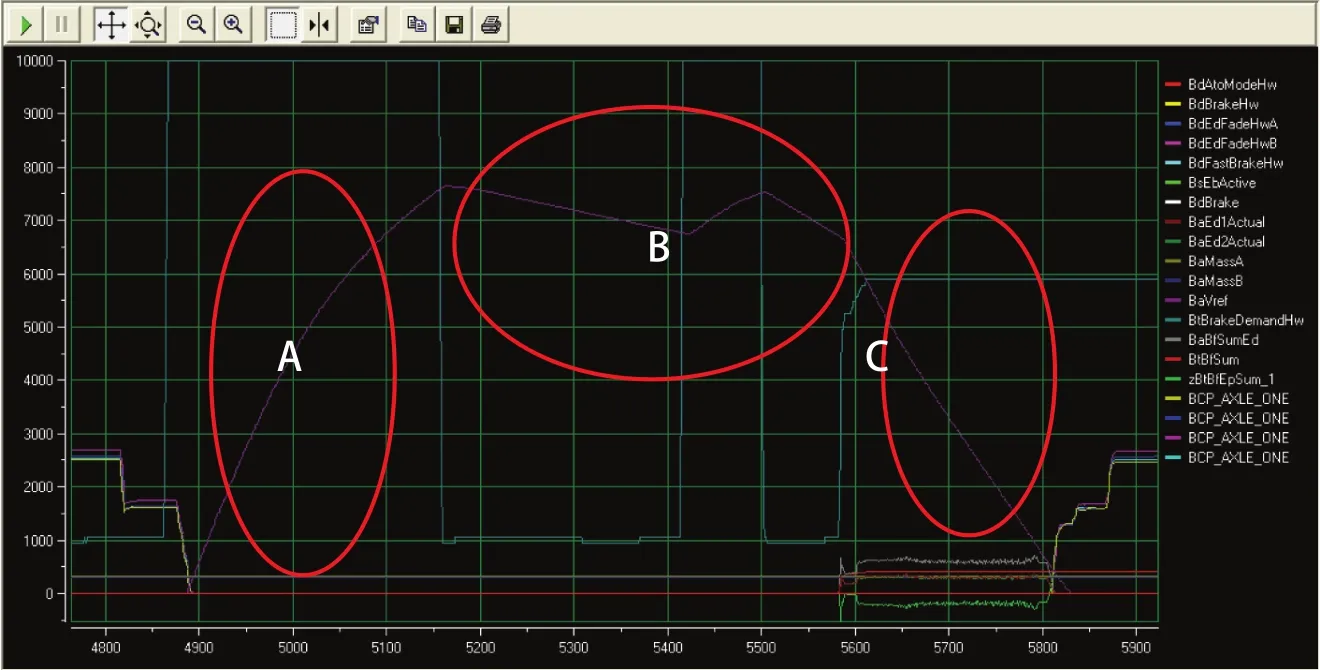
圖3 魚珠—大沙地列車人工控制運行曲線(紫色曲線為列車速度,青色曲線為牽引/制動指令值)
2.1試驗方法
在相同的時間內,列車以ATO和人工控制(平穩運行階段采用惰行與100%牽引間斷操作)2種方式從同一車站運行到相同的下一車站。使用相同的測試設備、測試方法,進行數據采集。對比這2種運行方式的列車牽引能耗。
2.2ATO控制方式
ATO控制方式分為3個部分,加速階段、平穩運行階段、制動階段,如圖2所示是其中一個完整區間的曲線。加速階段,如圖2中A部分,ATO以100%牽引力牽引列車加速。當達到一定速度后,轉入平穩運行階段,如圖2中B部分。最后轉入制動階段,如圖2中C部分,列車貼近恒定減速度的速度曲線制動,直至在站臺停穩。
2.3人工控制方式
人工控制同樣分為3個部分,加速階段、平穩運行階段、制動階段。加速階段、制動階段仿照ATO控制方式進行操作,為了便于司機現場操作,對其中進行了一些簡化。平穩運行階段則采用惰行與100%牽引間斷操作。
(1)在加速階段,列車100%牽引直到預定速度,如圖3中A所示,取消了ATO控制中短暫降低牽引指令值的步驟。
(2)在平穩運行階段,惰行與100%牽引間斷操作,如圖3中B所示。在此階段,ATO控制,則是保持列車恒速。為使2種方式運行的時間相同,人工控制方式的列車最高速度要較ATO控制方式的高。
(3)在制動階段,列車以恒定的50%指令值制動,直至停車,如圖3中C所示。基本與ATO控制方式在此階段的目標曲線斜率相當,且便于司機操作。
2.4數據采集方式
數據采集儀DAVA5000采集單節車的母線直流電壓和母線直流電流,用以計算單節車的能耗。制動系統記錄軟件“Brake consult”記錄列車牽引/制動的指令值(包括ATO指令值、人工控制指令值),以及列車運行的速度曲線。

表1 試驗結果
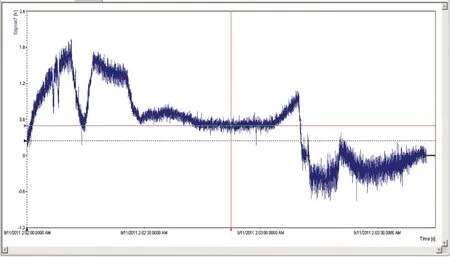
圖4 魚珠—大沙地ATO運行條件下測得的電流曲線
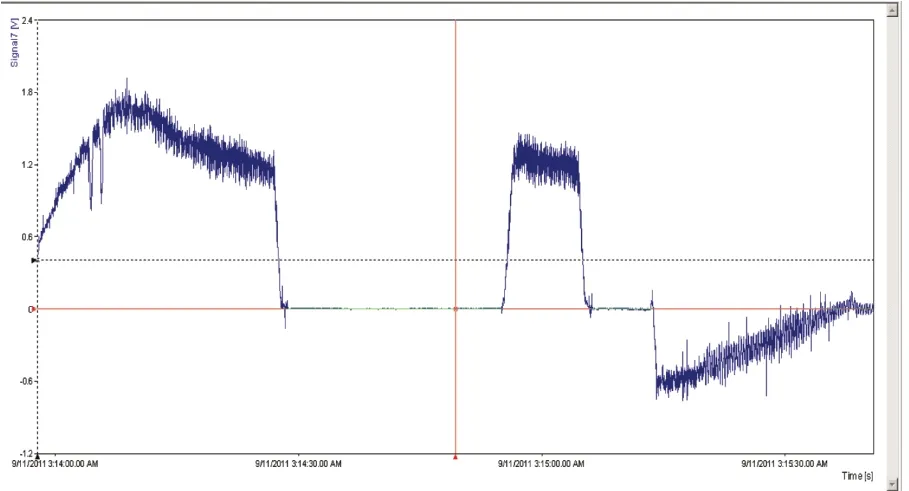
圖5 魚珠—大沙地人工控制運行條件下測得的電流曲線
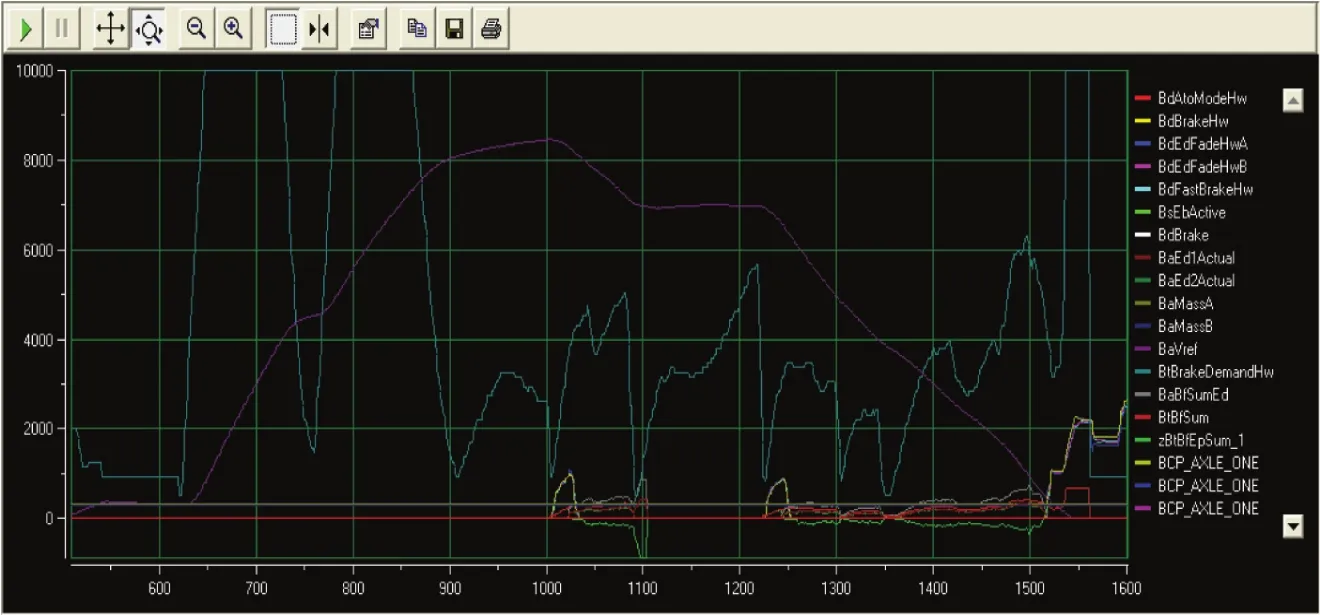
圖6 員村—科韻路列車ATO控制運行曲線(紫色曲線為列車速度,青色曲線為牽引/制動指令值)
3 區間試驗和能耗對比
在魚珠—大沙地區間,列車以ATO方式從魚珠站臺啟動,到大沙地站臺停車為止,整個區間的運行時間約為96 s。以人工控制方式,列車從魚珠站臺啟動,以100%牽引力加速到約77 km/h,轉為惰行,當列車速度逐漸降到約67 km/h后,再次以100%牽引力加速至約77 km/h,然后轉為惰行,列車將要進站前,以50%的恒定制動力制動,在大沙地站臺停穩。整個區間的運行時間約為95 s。近似認為兩者時間相等。
以相似的方式,也在員村—科韻路區間進行了試驗。在2個區間、采用2種操縱方式的牽引能耗測試結果如表1所示。
從表1的測試結果可以看出,在近似相等的區間運行時間內,在區間最高速度提高不超過4 km/h的情況下,平穩運行階段采用惰行與100%牽引間斷操作方式,相對于現有ATO運行方式,都有不同程度的能耗節約。
魚珠—大沙地區間,由于從魚珠往大沙地方向線路總體處于上坡狀態,加速時間較長,節約的能耗主要是由于:在平穩運行階段改變了操作方式,提高了牽引利用率。員村—科韻路區間的線路總體處于U形,車站地勢高且基本處于同一水平面上,中間地勢低,節約的能耗,除提高牽引利用率外,還有效地利用了下坡的勢能,節能效果因而更為明顯。

圖7 員村—科韻路列車人工控制運行曲線(紫色曲線為列車速度,青色曲線為牽引/制動指令值)

圖8 員村—科韻路ATO運行條件下測得的電流曲線
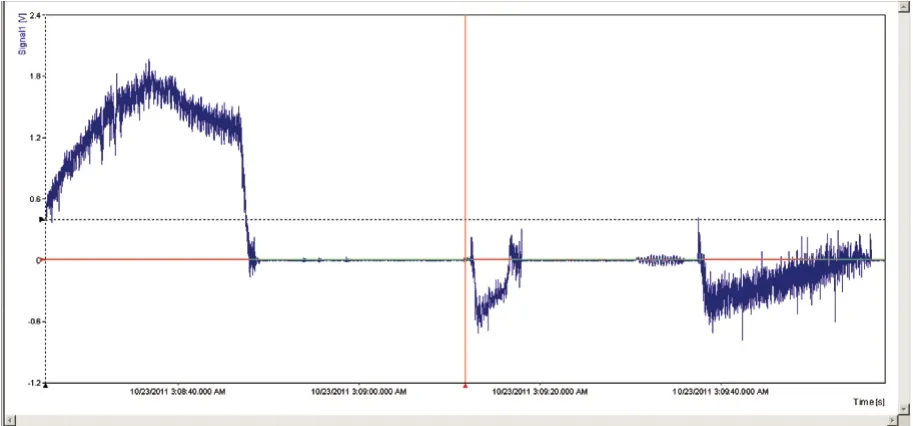
圖9 員村—科韻路人工控制運行條件下測得的電流曲線
4 小結
綜上所述,平穩運行階段采用惰行與100%牽引間斷人工操作方式,將能更好地適應直線電機的特性,以及直線電機線路的特點。相對于現有平穩運行階段采用的恒速運行方式,不但提高了牽引效率,而且更有效地利用了坡道的勢能,因而更加節能。
參考文獻
[1] 吳冬華. 強迫風冷與自然風冷直線電機車輛能耗對比分析[J].鐵道機車車輛,2008,28(增刊).
[2] 劉友梅,楊穎. 城軌交通的一種新模式——直線電機驅動地鐵車輛[J]. 電力機車與城軌車輛,2003,26(4).
[3] 黃良驥,唐濤. 地鐵列車自動駕駛系統分析與設計[J]. 北方交通大學學報,2002,26(3).
[4] 吳汶麒. 城市軌道交通信號與通信系統[M]. 北京:中國鐵道出版社,1998.
[5] 李鯤鵬,張振生. 直線電機軌道交通系統能耗分析[G]//第四屆中日直線電機軌道交通技術交流會主題報告匯編. 2007.
責任編輯 冒一平
Study and Tests Comparison of Energy Saving Optimization Operation on Guangzhou Metro Line 5
Wang Peng
Abstract:Guangzhou metro Line 5 uses the linear motor system. Taking into consideration of the characteristics that operating effi ciency of linear motor is not high, energy loss is big and line gradient is big and large in quantity, optimization of existing ATO mode. The energy consumption tests are analyzed and compared, having a good energy saving effect.
Keywords:linear motor, train operation, energy saving, control strategy, energy consumption comparison test
收稿日期2014-09-01
中圖分類號:U268.6
猜你喜歡
中國科技博覽(2016年22期)2016-11-01 15:34:51
中國科技博覽(2016年22期)2016-11-01 14:48:58
時代金融(2016年23期)2016-10-31 13:17:24
中國科技博覽(2016年19期)2016-10-19 13:10:22
中國科技博覽(2016年19期)2016-10-19 12:51:06
中國科技博覽(2016年18期)2016-10-19 11:23:00
中國科技博覽(2016年18期)2016-10-19 07:47:05
科學與財富(2016年28期)2016-10-14 21:10:06
科學與財富(2016年28期)2016-10-14 20:02:56
科學與財富(2016年28期)2016-10-14 01:30:30