慣導系統參數重復性機理分析建模方法研究
2015-03-11 05:15:53杜祖良胡平華苗成義
導航定位與授時 2015年3期
杜祖良,黃 鶴,胡平華,苗成義
(北京自動化控制設備研究所,北京 100074)
?
慣導系統參數重復性機理分析建模方法研究
杜祖良,黃 鶴,胡平華,苗成義
(北京自動化控制設備研究所,北京 100074)
針對慣導系統參數長期重復性提出了基于微觀過程分析的機理研究和建模方法,可用于揭示慣導系統參數在多環境載荷作用下隨時間推移發生變化的機理并建立相應的模型,能夠有效指導慣導系統參數變化控制技術方法研究和性能參數變化加速試驗方法研究,從而為解決慣導系統參數長期重復性問題奠定機理和模型基礎。
慣性導航系統;長期重復性;機理
0 引言
慣導系統的工作過程是通過采集陀螺、加速度計等測量信號,在給定運動初始條件下,由計算機按照一定的數學模型解算出載體的姿態、速度、位置等導航信息。數學模型的作用在于描述慣導系統和慣性器件的基本特性,為了獲得準確的模型參數,就需要對慣導系統進行標定。
標定得到的參數被存儲在慣導系統的導航計算機中,作為導航解算的基本信息。但是在存貯、運輸、使用等過程中,隨著時間的推移,內因(如應力釋放、材料蠕變[5]等)和外因(如振動、溫濕度變化、電磁場等)的共同作用會導致慣導系統的實際參數發生變化。使得實際參數與導航解算所用參數之間的一致程度下降,從而導致數學模型對于系統和器件描述的準確度降低,最終影響整個系統的性能和精度。
對于慣導系統參數變化的這種特性,一般采用參數重復性的概念來描述,是指在條件轉換或經過非工作狀態后,恢復到原有測量條件并在規定的時間間隔內重復測量慣導系統同一參數所得結果之間的一致程度[8]。這種一致程度越高,則慣導系統的參數重復性越好,反之則參數重復性差。在實際使用中,有時還采用性能保持期來描述慣導系統的參數變化特性,它是指參數重復性能夠保持在預定范圍內的時間。
慣導系統作為現代精確制導武器的核心導航設備,如果其參數長期重復性差將帶來嚴重的影響。首先是嚴重制約武器系統作戰效能的發揮,主要體現在:使用過程中慣導系統需頻繁返回技術陣地進行標定測試,嚴重影響武器戰備值班時間;作戰前慣導系統需完成大量標定測試工作,延長了武器作戰準備時間。其次是嚴重降低武器系統使用維護性能,主要體現在:慣導系統頻繁、復雜的標定維護工作對場地、人員、設備等配套條件需求多,顯著增加了武器使用維護成本;慣導系統標定維護工作量大,涉及導彈拆裝及測試多個環節,增加了武器使用維護的復雜程度。
標定不能改變慣導系統本身的參數重復性,相反對參數的標定和補償是建立在參數具有重復性基礎上的。如果參數重復性不具備足夠的水平,在短時間內慣導系統的誤差就超過允許范圍,使得標定的時間間隔非常短,給實際使用帶來的代價將是無法接受的。因此,要有效控制甚至消除慣導系統參數長期重復性的不良影響,必須從研究掌握慣導系統參數在各種環境因素作用下隨時間變化的機理,在此基礎上從根本上采取全面有效的技術措施。
慣導系統的種類很多,按照結構主要可分為傳統的平臺式、捷聯式以及近年來國內發展迅速的旋轉調制式。雖然不同形式的慣導系統在性能和具體實現方式方面有各自的特點,但在參數長期重復性方面可以提煉出許多共性基礎理論和方法。因此本文以一種典型的平臺慣導系統主要對象,開展參數長期重復性的機理和模型研究,其研究成果可以在其他類型慣導系統中推廣應用。例如,裝配應力松弛規律對慣性器件安裝誤差的影響研究以及穩定化方法,無論對于平臺慣導系統還是捷聯和旋轉調制慣導系統都是適用的;平臺慣導系統中殼體效應機理及解決措施的研究方法可用于指導研究解決同樣存在于旋轉調制型慣導系統中的殼體效應問題。
1 慣導系統參數時變機理分析建模基本方法
慣導系統是精密、復雜的產品,其參數隨時間變化影響因素多且各因素間相互關系錯綜復雜,同時研究對象非常精細且研究周期長,因此完成慣導系統參數時變機理的分析建模是一項非常困難的工作。
為了解決這一問題,本文認為慣導系統參數時變機理的分析建模應在分析產品工作原理的基礎上,深入研究器件及材料微觀特性,闡明機理并建立模型,同時注意利用實測歷史數據和環境驗證試驗等進行及時、充分的驗證,形成閉環研究方法,確保機理研究和模型建立的正確性。其研究主要分為以下四部分:
1)從系統、器件的工作原理出發,深入研究慣性器件及系統參數變化的內在機制,建立其參數與內部影響因素間的關系模型,確定影響平臺慣導系統參數變化的內部關鍵因素;
2)從研究材料、器件等內部特性微觀變化機理入手,研究引起慣性器件及系統參數變化的外部原因,確定多環境載荷對慣導系統內部特性的影響,建立內部影響因素與多環境載荷間的關系模型;
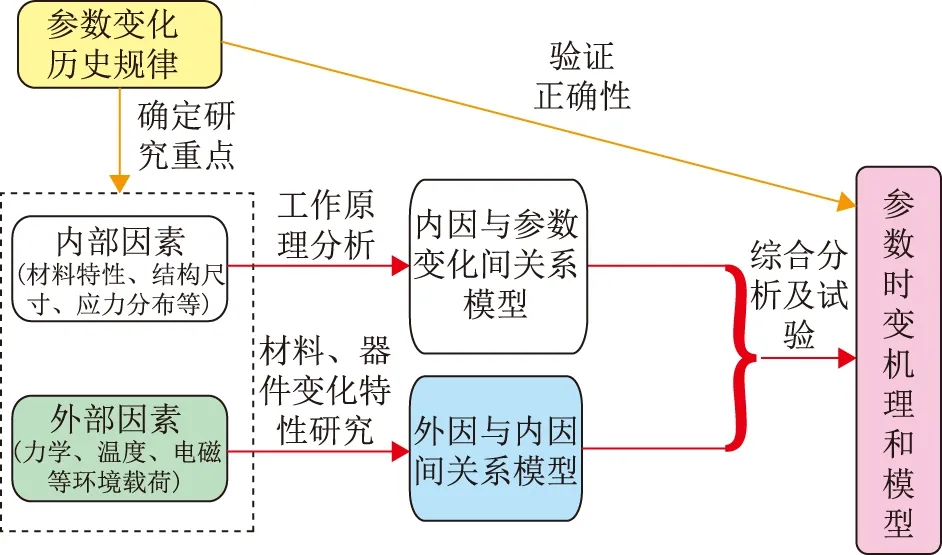
圖1 慣導系統參數變化機理分析建模基本方法Fig.1 The basic analysis and modeling method for diversification mechanism of INS parameters
3)在上述工作的研究基礎上將慣性器件及系統參數變化的內在機制和外部原因結合起來,應用各種建模手段,依據參數與內部影響因素間的模型以及內部影響因素與多環境載荷間的關系模型,提煉出系統參數變化的工程化模型;
4)收集、分析典型產品實際使用條件下的標定測試歷史數據,應用數據分析手段挖掘產品實際參數變化規律,為成果驗證提供實測數據依據,也可為開展慣導系統參數變化機理分析及建模研究確定關鍵重點提供幫助。
慣導參數變化機理分析建模方法如圖1所示。
2 慣導系統參數時變機理分析建模方法在某型平臺慣導系統上的應用研究
某型平臺慣導系統采用小型高精度動力調諧陀螺和石英撓性加速度計構成小型三軸指示性慣性穩定平臺方案。針對這一型慣導的器件和結構特點,應用前述方法完成了對其參數時變機理的分析建模研究。
2.1 某型平臺慣導系統參數時變機理分析建模技 術方案及成果 影響該型平臺慣導系統參數穩定性的關鍵在于陀螺、加速度計和慣性平臺三部分,因此主要針對這三個研究對象從外因和內因兩方面,深入研究儀表工作原理和材料基本特性,揭示了其關鍵參數的變化機理并建立了相應的模型,最終得到了整個平臺慣導系統的參數變化機理及其模型。研究具體實施技術方案如圖2所示。

圖2 某型平臺慣導系統參數時變機理分析建模技術方案Fig.2 The analysis and modeling technology project for diversification mechanism of INS parameters
按照此技術方案,最終闡明了該型平臺慣導系統參數變化的內在機理,確定了關鍵影響因素。表1列出了研究得到的其3大類10余項參數變化的主要影響因素。

表1 某型平臺慣導系統主要參數關鍵影響因素Tab.1 Key influence factors of mostlyparameters for a certain INS
2.2 某型平臺慣導系統參數時變機理分析建模情況示例 影響平臺慣導系統性能的關鍵參數很多,其中平臺殼體效應漂移是比較有代表性,因此本文以這一參數為例介紹平臺慣導系統參數時變機理分析建模方法的應用。
2.2.1 平臺殼體效應漂移產生機理研究
殼體效應漂移是隨姿態角變化產生的一種附加平臺漂移,而平臺漂移的產生歸根結底是陀螺漂移引起的,因此研究平臺殼體效應漂移的產生機理就是要從各種環境因素影響陀螺漂移著手。通過深入分析動力調諧陀螺和慣性平臺的工作原理,可以得出影響平臺殼體效應漂移的內部因素主要有內部溫度場分布、磁場分布、各軸干擾力矩和伺服回路零位以及振動等,其作用機理簡圖如圖3所示。

圖3 某型平臺慣導系統平臺殼體效應漂移產生機理Fig.3 Mechanism of production for heading sensitive drift of a certain INS
1)平臺內溫度場引起平臺殼體效應漂移的機理。雖然平臺內部具有溫控系統,可較好的控制內部溫度隨時間的漂移,但是由于結構和熱傳遞過程等因素影響,平臺內部的均勻溫度變化和溫度梯度都難以避免,因此當平臺姿態角發生變化時,陀螺周圍的溫度環境會發生變化。而由于陀螺漂移自身具有溫度敏感性,因此也會隨之發生變化,從而引起平臺殼體效應漂移。平臺內溫度場對平臺殼體效應漂移的影響主要受溫度場分布特性和陀螺溫度敏感特性兩方面因素的影響。
2)各軸干擾力矩和伺服回路零位引起平臺殼體效應漂移的機理。伺服電路零位通過引起陀螺失調角而引起陀螺的彈性約束項漂移,由于坐標分解器的作用,隨著方位角的變化陀螺失調角也會變化,最終引起平臺漂移的殼體效應。而平臺的各框架軸上不可避免地會存在各種干擾力矩,若是框架軸上有干擾力矩,由于伺服回路剛度有限,陀螺轉子同樣必須產生失調角,以便使力矩電機產生一個力矩來抵消它們。這與伺服電路零位產生的影響是等效的,也會引起平臺漂移的殼體效應。
3)平臺內磁場引起平臺殼體效應漂移的機理。動力調諧陀螺的漂移同樣具有磁敏感特性,在環境磁場發生變化時其漂移也會發生變化。平臺中既有力矩電機磁鋼等硬磁材料,也有隔磁環和陀螺殼體等軟磁材料,這些都會影響到平臺內部磁場分布。由于平臺結構和零部件分布并不是完全對稱,因而其內部磁場空間分布也不是均勻的。因此當平臺姿態角發生變化時,陀螺受到的磁場干擾也會發生變化,從而通過陀螺磁敏感系數引起陀螺漂移變化,進而引起平臺殼體效應漂移。平臺內磁場對平臺殼體效應漂移的影響主要受磁場分布特性和陀螺磁敏感特性兩方面因素的影響。
4)振動引起平臺殼體效應漂移的機理。能夠影響陀螺漂移的振動既有內部振動也有外部振動,試驗和分析表明,對于平臺殼體效應而言,外部振動影響很小。平臺內部振源主要為兩個陀螺的自轉振動和攪拌風扇的振動,攪拌風扇的頻率相對單一、幅值小,而且距離陀螺比較遠,因此影響很小。而兩個陀螺同在臺體上,相互距離很近,振動譜很豐富且含有陀螺自身最敏感的頻率,因此可以認為平臺內部振動主要就是兩個陀螺自轉振動的相互影響。陀螺自轉振動在平臺上引起頻率分布十分豐富的振動干擾,而由于動力調諧陀螺自身工作原理和構造特點的原因,其漂移對于振動十分敏感,因此平臺會產生由振動引起的漂移。當平臺框架角發生變化時,陀螺受到的振動干擾就會隨之發生變化,從而導致平臺殼體效應漂移的產生。在振動方面影響平臺殼體效應漂移的主要是振源特性、平臺振動傳遞特性以及陀螺振動敏感漂移三方面因素。
2.2.2 平臺殼體效應漂移時變機理研究
(1)平臺殼體效應漂移變化主機理研究
為了完成平臺殼體效應漂移在多環境載荷作用下的時變機理的分析建模,需從內部溫度場分布、各軸干擾力矩和伺服回路零位、磁場分布以及振動等四個方面研究平臺殼體效應漂移變化主機理。
1)通過研究,可以得出溫度場分布特性是引起平臺殼體效應漂移的主要因素之一。但是進一步的測試和研究表明,無論是熱源特性、零件熱容以及內部氣體介質特性等影響平臺內部溫度場分布特性的各個因素,還是影響陀螺溫度敏感漂移的各個因素,在平臺長期貯存和使用過程中受正常外界環境載荷作用發生的變化較小,因此其對于殼體效應漂移的影響主要在幅值上,而對于其幅值變化的影響則可以忽略,所以內部溫度場特性變化不是平臺殼體效應漂移長期重復性問題的主機理。
2)理論分析和試驗結果表明,影響平臺框架軸干擾力矩、伺服回路零位和陀螺彈性漂移各個因素,受正常外界環境載荷作用條件發生的變化很小,加之現在慣性平臺中對相關漂移的影響進行了補償,因此各軸干擾力矩和伺服回路零位變化不是平臺殼體效應漂移長期重復性問題的主機理。
3)通過研究,可以得出磁場分布特性是引起平臺殼體效應漂移的主要因素之一。但是進一步的測試和研究表明,影響平臺磁場分布特性和陀螺磁敏感系數的各種因素中,無論是硬磁材料(如伺服力矩電機磁鋼、陀螺力矩器磁鋼等),還是軟磁材料(內部隔磁環、陀螺殼體等)受正常外界環境載荷作用下發生的變化很小,其影響一旦形成是固定的,隨著時間很少發生變化,因此內部磁場特性變化不是平臺殼體效應漂移長期重復性問題的主機理。
4)通過對產品生產調試和用戶貯存使用等實測數據進行統計分析,以及相關的理論和試驗研究發現,平臺內部振動特性變化與平臺殼體效應漂移變化間具有密切的關系。因此針對振動引起平臺殼體漂移的三個方面——振源特性、平臺振動傳遞特性以及陀螺振動敏感漂移等,研究其變化規律及影響是研究平臺殼體效應漂移長期重復性問題的關鍵。
(2)振動引起平臺殼體效應漂移產生及變化機理研究
1)平臺內部振源特性的影響分析。平臺上能夠影響陀螺漂移的振源主要為兩個陀螺的自轉振動,引起陀螺產生振動的因素主要有三部分:軸承引起的振動、陀螺轉子諧振引起的振動和電機磁勢力波引起的振動。
①軸承引起的振動。主要包括軸承本身結構特點及加工裝配誤差引起的振動、軸承運行故障引起的振動以及上述振動的多次諧波。
②陀螺轉子諧振引起的振動。主要是由陀螺接頭剛度決定的轉子的諧振點,受軸承沖擊振動的激勵而發生諧振振動。
③電機磁勢力波引起的振動。通過電機氣隙磁場磁勢力波的作用,電源特性對于陀螺振動特性也有較明顯的影響。
通過陀螺相應材料和零件分析及試驗,陀螺內部的振源特性變化對于殼體效應漂移的影響相對微小,因此平臺內部振源特性變化造成的影響不是平臺內部振動特性變化的主要原因,因而也不是引起平臺殼體效應漂移變化的主要原因。
2)陀螺振動敏感漂移的變化分析。基于原理和構造的原因,動力調諧陀螺的漂移對振動比較敏感。對于動力調諧陀螺的振動敏感漂移,通常文獻上指出的主要包括:沿驅動軸具有兩倍旋轉頻率的角振動引起的漂移誤差、垂直于驅動軸具有兩倍旋轉頻率的線振動引起的漂移誤差、平行于旋轉軸一倍旋轉頻率的線振動引起的漂移誤差以及當陀螺軸向和徑向同時有同頻率振動時因不等彈性力矩引起的漂移誤差。經過深入研究,我們得出實際上還有沿自轉軸方向一倍旋轉頻率的角振動引起陀螺漂移,以及當陀螺軸向和徑向有同頻率振動時因圓柱形力矩引起的漂移誤差。經過補充完善后,動力調諧陀螺振動敏感漂移種類如表2所示。

表2 動力調諧陀螺振動敏感漂移列表Tab.2 Tabulation for vibration sensitive drifts of DTG
通過陀螺相應材料和零件分析及試驗,陀螺內部結構特性變化對于殼體效應漂移的影響相對微小,因此陀螺振動敏感漂移特性變化造成的影響不是平臺內部振動特性變化的主要原因,因而也不是引起平臺殼體效應漂移變化的主要原因。
3)振動傳遞通道的影響分析。在平臺上工作時,陀螺帶動平臺作受迫振動,平臺振動傳遞特性的變化,將影響陀螺所受振動的變化,因而通過引起陀螺振動敏感漂移從而影響平臺漂移。因此需要建立平臺的精細模型,準確分析其振動傳遞特性。
為了提高分析的準確度,首先需要建立軸承與慣性平臺的剛度耦合接口模型。一般分析平臺結構振動特性時,軸承通常都作為剛體處理,這使得分析結果的準確性受到了很大影響。為了克服這一問題,確保平臺內部振動分析模型的準確性,首先對平臺內部的軸承進行建模并研究其影響因素。軸承剛度計算以Hertz接觸理論及軸承內部載荷分布模型為基礎,利用有限元技術,建立了軸承整體剛度模型,考慮了各項內部和外部影響因素。對于該型平臺,研究的重點是平臺的方位軸承,為了滿足平臺內部振動場分析模型的研究,在上述模型的基礎上進行了簡化處理。簡化后的軸承模型如圖4所示。

圖4 慣性平臺軸承模型圖Fig.4 Model diagram of bearing in inertial platform
利用有限元技術建立慣性平臺的模型,進行結構力學特性分析,分析中帶入了上述軸承模型。以該模型為基礎,分析了在不同航向角條件下的模態變化。表3給出了航向角分別為0、90、204和240時,慣性平臺前30階整體模態中隨航向角變化最為顯著的8個模態的變化情況。
計算結果表明,航向角變化時慣性平臺振動模態有明顯的變化,說明平臺振動傳遞特性會隨著姿態角的變化而變化,使陀螺在不同航向角條件下工作時受到的振動干擾也隨之發生變化,導致陀螺漂移變化,最終引起平臺殼體效應漂移。

表3 平臺模態與航向角間關系仿真計算結果Tab.3 Simulation resultsof the relationship between platform vibration mode and azimuth
確定了這一點后,接下來要分析導致各框架角位置上平臺振動傳遞特性在時間和環境載荷作用下發生變化的原因,這是研究平臺殼體效應漂移變化及其影響的關鍵。
通過進一步研究得出,導致平臺內部振動傳遞特性變化的關鍵因素是裝配應力松弛。應力松弛一般可以劃分為3個階段:在第1階段,應變迅速增加的同時應變率迅速降低;在第2階段,應變率基本不變;第3階段,應變率上升,直至材料失效。第1和第3階段,隨著應力變化,蠕變速度非常快,而第2階段為穩態蠕變階段,產品正常貯存和使用時應力松弛一般處于這個階段,穩態應力松弛符合Hook-Norton定律,如式(1)所示。
(1)
式中,σ為剩余應力,MPa;K、n為Norton定律常數;E為彈性模量,MPa;σ0為初始應力,MPa;t為松弛時間,h。
應力松弛會導致結構的變形,包括彈性變形和塑性變形,前者將引起結構阻尼變化,后者將引起粘性阻尼變化。結構阻尼變化將對振動加速度傳遞的幅值特性產生影響,而粘性阻尼變化對振動加速度傳遞的幅值和頻率特性均會產生影響,進而改變平臺內部振動特性。
影響平臺內部振動傳遞特性最為重要的裝配應力為方位軸承預緊力。利用前述模型,計算軸承在不同預緊力下900~1000Hz內響應點頻率響應變化結果,如圖5和圖6所示。

圖5 方位軸無預緊力時的平臺幅頻曲線Fig.5 The amplitude frequency curve of platform with 0 pretightening force on azimuth axis

圖6 方位軸預緊力為1N/mm2時的平臺幅頻曲線Fig.6 The amplitude frequency curve of platform with 1N/mm2 pretightening force on azimuth axis
從計算結果可見,預緊力變化的情況下,振幅和共振點均有變化,因此預緊力的變化對于軸承振動傳遞特性具有影響。特別是如果這些共振點出現在陀螺諧振點分布的頻率段內,在某些情況下(如幅頻特性諧振點與陀螺諧振頻率接近甚至重合)則可能造成較大的影響。
由計算結果還可以看出,平臺結構模態頻率隨軸承工況的不同有一定的變化,但通常情況下并不十分顯著。但是軸承預緊力的變化在一些情況下對于局部振動傳遞特性產生明顯的影響。對于方位軸承而言,這一點更為重要,因為其直接連接臺體,與陀螺的距離很近,且幅頻特性諧振點與陀螺諧振頻率分布區間有重合部分,特殊情況下兩者可能發生接近甚至重合的現象,使陀螺工作時受到的振動干擾發生較大變化,從而導致殼體效應漂移超差。
4)相關測試驗證情況。
為了驗證平臺內部振動特性變化結果,對平臺工作時的臺體振動隨姿態角的變化情況進行了測試,結果表明,平臺臺體上的振動量隨平臺航向角的變化而出現了顯著變化。由于在短時間內振源特性和陀螺漂移振動敏感特性是相對穩定的,說明振動傳遞通道的變化是引起平臺殼體效應漂移的關鍵原因。圖7給出了平臺臺體0~2kHz上的振動總量測試結果隨航向角變化的情況。

圖7 平臺臺體0~2kHz上的振動總量測試結果隨航向角變化情況Fig.7 The test results of relationship between platform total vibration on 0~2kHz frequency range and azimuth
為了證實裝配應力變化對慣性平臺模態的影響,通過試驗測試對調整方位軸承預緊力前后的平臺模態進行了對比測試。對一套殼體效應漂移長期重復性超差的平臺A進行了多個位置的諧振頻率測量,其結果如圖8所示。重新調整了慣性平臺A方位環的預緊力,并對調整后的慣性平臺A的諧振頻率進行測試,結果如圖9所示。可以發現多個模態諧振頻率發生了變化。而參數標定結果表明,調整方位軸預緊力后這套平臺殼體效應漂移的幅值和穩定性有較為明顯的變化,從而證實了平臺內部振動特性對平臺殼體效應漂移的影響。

圖8 調整預緊力前平臺諧振點測試結果Fig.8 The test results of platform resonance point before pretightening force adjustment

圖9 調整預緊力后平臺諧振點測試結果Fig.9 The test results of platform resonance point after pretightening force adjustment
3 慣導系統參數時變機理分析建模的作用和意義
研究慣導系統參數長期重復性問題,主要目的有兩個:一個是延長慣導系統性能保持期,減小裝備使用中的標定維護工作量,以提高武器作戰效能,減低使用維護成本;另一個是解決慣導系統參數長期重復性難以快速、準確測試檢驗的問題,加快裝備的研制交付進度。而掌握慣導系統參數時變機理,對于實現這兩個目標具有十分重要的支持作用,因此可以說解決慣導系統參數時變機理分析建模問題是解決慣導系統參數長期重復性的基礎。
3.1 為提高慣導系統參數長期重復性提供有力技術支撐 提高慣導系統參數長期重復性的工作涉及系統設計、零部組件制備、整機裝調等各個環節,涵蓋從材料器件、部組件、器件直到系統的各個層次,是一項復雜的系統工程。因此實現慣導系統參數時變機理的分析建模,全面、準確地掌握各種影響因素及其相互關系,對于從設計、零部組件制備和整機裝調等方面進行有效技術優化以提高慣導系統長期重復性有著十分重要的意義。設計方面,依據慣導系統參數時變機理及模型可以準確掌握各項參數變化的誤差因素和可控因素,從而建立有效的設計優化模型,提出系統完善的設計改進措施,為慣導系統提高參數長期重復性奠定基礎;零部組件制備方面,依據慣導系統參數時變機理及模型可以準確確定影響參數變化的關鍵零部組件及其重要性能指標,同時還可以從中獲得外界因素對于這些零部組件重要性能指標的影響規律,從而可制定針對性強且有效的關鍵零部組件性能評價和穩定化措施,控制影響慣導系統參數長期重復性的重點因素,例如對金屬與金屬、金屬與非金屬利用粘接劑連接的場合,利用溫度沖擊或高頻振動進行穩定化處理[6-7];整機裝調方面,依據慣導系統參數時變機理及模型可獲得環境應力對產品整體性能的作用規律,從而可以確定合理的高應力試驗剖面和方法,實現對于產品整機的穩定化處理,例如在局部進行合理的振動,以消除裝配應力[6],從而全面強化慣導系統參數長期重復性。在慣導系統參數時變機理及模型的支持下,上述三方面工作相輔相成,可以顯著提高慣導系統的參數長期重復性,從而延長慣導系統性能保持期,減小裝備使用中的標定維護工作量。
3.2 為實現慣導系統參數長期重復性快速準確測 試奠定堅實基礎 慣導系統參數變化具有周期長、精度高的特點,特別是隨著慣導系統性能保持期越來越長,采用傳統自然條件下的等時間測試方法,耗時難以承受,因此必須研究加速試驗技術。同時,由于慣性器件和系統屬于精密高價值產品,采取依賴于大量樣本試驗加統計分析的傳統加速方法成本難以承受,因此必須研究基于機理的小樣本加速試驗方法。
以慣導系統參數時變機理及模型為基礎,研究慣導系統參數加速模型建模方法,揭示性能參數與應力及時間變化的動態關系,同時研究加速機理一致性判定方法,確保高應力和自然應力條件下變化機理一致,最終可建立慣導系統性能參數加速模型,從而突破基于物理模型的慣導系統參數長期重復性加速試驗的關鍵技術問題。
實現了基于機理的加速試驗方法,可以快速、準確的檢測驗證慣導系統的參數長期重復性,這對于產品的研制、生產和交付具有重要意義。在研制和生產過程中,采用此方法,可以盡快準確評價各項技術措施和工藝手段對慣導系統參數長期重復性的正確性和有效性,以便于改進和驗證。在產品交付過程中,可以對慣導系統參數長期重復性這項重要參數進行快速檢驗,加快裝備的交付進度。此外,依據慣導系統參數時變機理及模型可用于分析計算產品加速試驗的極限條件和加速因子等,為解決慣導系統加速貯存試驗與壽命評定技術難題提供新的技術途徑。
4 結論
對于慣導系統這類精密復雜的產品,適用采用基于微觀過程分析的機理研究和建模方法,以從根本上揭示慣導系統參數在多環境載荷作用下隨時間推移發生變化的機理并建立相應的模型。在此基礎上研究全面、完善的慣導系統參數變化控制技術方法以及基于物理模型的性能參數加速試驗方法,可有效解決慣導系統參數長期重復性問題,對于提高精確制導武器的作戰效能和使用維護性具有十分重要的意義。
[1] 胡平華. 動力調諧陀螺穩定平臺航向效應漂移研究[D]. 工學博士論文,2000.
[2] 湯姆遜,達利. 振動理論及應用[M].北京:清華大學出版社,2005.
[3] 師漢民,黃其柏. 機械振動系統:分析·建模·測試·對策[M]. 武漢:華中科技大學出版社,2013.
[4] 曾攀. 有限元分析及應用[M]. 北京:清華大學出版社,2004.
[5]KongMa,RobertGoetz,SheshKSrivatsa.Modelingofresidualstressandmachiningdistortioninaerospacecomponents.AFRL-RX-WP-TP-2010-4152.
[6]SKwofie.Plasticitymodelforsimulation,descriptionandevaluationofvibratorystressrelief[J].MaterialsScienceandEngineeringA,2009,516:154-161.
[7]DuLiqun,WangQijia.ExperimentalstudyonultrasonicstressreliefforcuredSU-8photoresistlayer[J].MicroelectronicEngineering,2010,87:2555-2560.
[8]IEEEstandardspecificationformatguideandtestprocedureforlinearsingle-axis,nongyroscopicaccelerometers[S].IEEESTD1293-1998,SponsorbyGyroandAccelerometerPaneloftheIEEEAerospaceandElectronicSystemsSociety.
[9]PetersRB,StoddardDR,MeredithK.Developmentofa125gquartzflexureaccelerometerfortheRIMUprogram[C]//.IEEEPLANS1998:17-24.
Research on Analysis and Modeling Method for Repeatability Mechanism of Inertial Navigation System Parameters
DU Zu-liang,HUANG He, HU Ping-hua, MIAO Cheng-yi
(Beijing Institute of Automatic Control Equipment, Beijing 100074, China)
The Long-term repeatability of parameters of INS (inertial navigation system) is one of the most important technical matters which has effect on fighting efficiency and maintainability of modern precision-guided weapon. A research and modeling method based on microscopic analysis is proposed for revealing the mechanism and building models of changes on INS parameters initiated by multi-environmental loads and time. Controlling means and accelerated test methods for the changes of INS parameters can be researched on this basis, which is the foundation for solving the problems caused by long-term repeatability of INS parameters.
INS;Long-term repeatability;Mechanism
2015 - 3 - 21;
2015 - 4 - 15。
杜祖良,男 ,研究員,博導,主要從事導航控制方面的研究。
U666.12
A
2095-8110(2015)03-0001-10
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
