空中微智能傳感探測系統研究
2015-03-11 05:15:55柏楠
導航定位與授時 2015年3期
關鍵詞:研究
柏 楠
(北京自動化控制設備研究所,北京100074)
?
空中微智能傳感探測系統研究
柏 楠
(北京自動化控制設備研究所,北京100074)
針對智能傳感技術未來的重要發展方向,分析了作為空中微智能傳感探測系統的微型飛行器(MAV)技術特點和應用前景,研究了MAV的技術類型和國內外現狀,總結了MAV的技術發展趨勢,并在分析MAV主要系統構架的基礎上,梳理了MAV系統研制所涉及的主要關鍵技術,最后對MAV的未來發展給出了建議。
智能傳感;微型飛行器;MAV
0 引言
隨著電子信息技術的快速發展,傳感系統已不再局限于多個傳感器的簡單組合,智能化、微型化、一體化已成為其重要的發展方向,同時,智能傳感的內涵也由傳統的信息檢測、信號處理、自校準、自診斷等功能逐漸拓展至可在地面、水下及空中自主移動并執行傳感探測任務。微型飛行器MAV(Micro Air Vehicle)是一種尺寸只有手掌大小(約15~20cm),可由單兵或機器人平臺攜帶,具備自主飛行和傳感探測功能的新型飛行器。MAV從概念提出到工程研究,始終圍繞著空中監視、近距偵察、生化探測、巡視搜救等傳感探測的應用需求,因此,MAV可認為是具備自主飛行能力的高度集成的微型智能傳感系統即空中微智能傳感探測系統。
1 MAV的技術特點及應用
20世紀90年代初,在美國國防高級研究計劃局(DARPA: Defense Advanced Research Projects Agency)召開的一次未來軍事技術討論會上,美國蘭德公司(RAND)首次提出了微型飛行器(MAV)的概念,其認為發展尺度位于昆蟲量級的微型飛行系統對美國保持未來軍事領先具有重要意義,并且隨著空氣動力學、微機電技術、傳感技術以及先進一體化設計等技術的發展,MAV的研制是完全可實現的。1997年,DARPA正是批準啟動MAV研究計劃,投資3500萬美元,組織了一批高等院校、研究機構,對MAV開展為期4年的專項研究。
根據DARPA當時的設計目標[1],MAV尺寸不超過15cm(如圖 1)、重量不超過50g、任務載荷不超過20g、巡航速度10~20m/s、續航時間20~60min、航程10km、單機成本$1000~$5000(隨著研究的深入,該技術指標逐漸被放寬)。
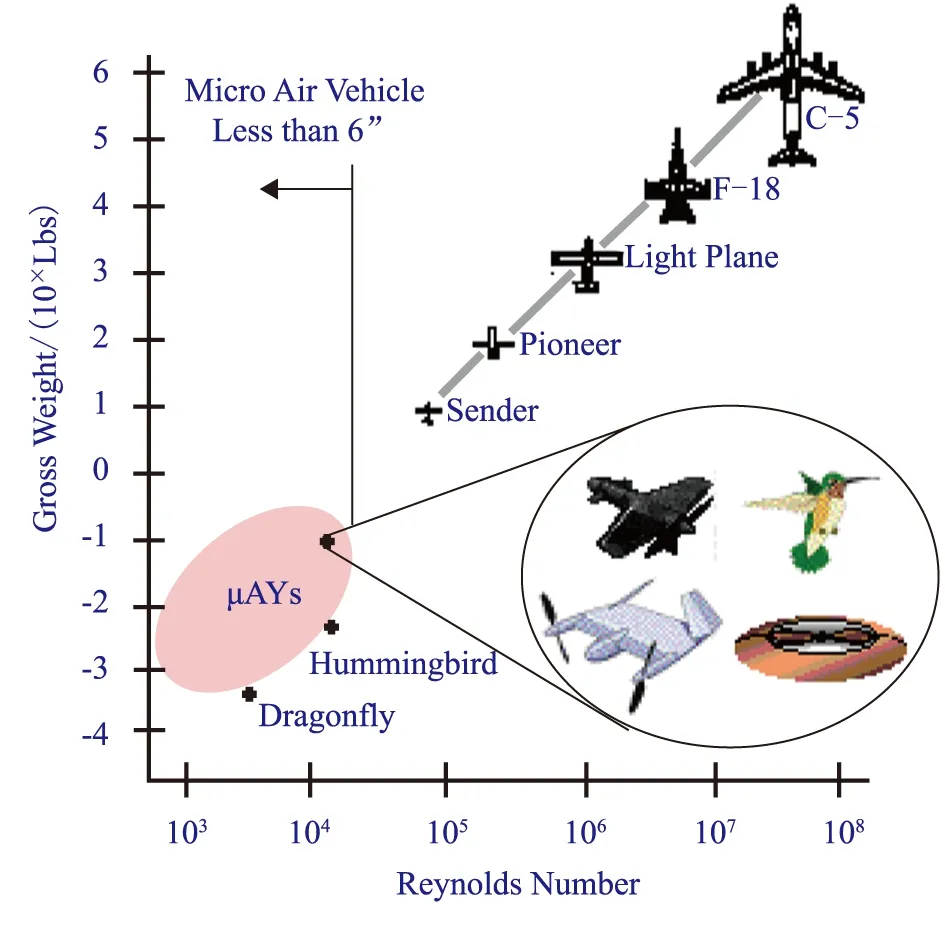
圖1 MAV的Re數量級Fig.1 Reynolds number of MAV
美國軍事專家認為,與常規無人飛行器相比,MAV系統應該具有軍事適用性;具有高分辨率的近距離成像系統,且能全天候工作;具有高精度定位的能力;體積小、重量輕、適合單兵攜帶;成本低、可靠性高;隱蔽性好,不易暴露。MAV無論是在軍事領域還是在民用領域,都有十分誘人的應用前景。
(1)在復雜城市環境中工作
由于MAV體積小、機動靈活,可以由單兵或小分隊攜帶。因此非常適合在建筑物林立眾多、地面復雜的城市環境中使用。
(2)低空偵察和通訊
MAV通過成像傳感器可對50~100m的近距目標進行全天候監視偵察,甚至可飛至敵方內部隱蔽位置進行秘密偵察。
(3)對核/生化武器進行探測、識別
MAV可以“毫無顧忌”對核/生化武器這類目標區域進行識別和探測,而不會造成人員傷亡。
(4)測繪、搜救
利用MAV體積小、機動靈活的優勢,可對洞穴等未知環境進行探測、測繪;通過MAV編隊工作,可大大提高生命探測和搜救的效率。
MAV由于在軍民用領域潛在的廣闊應用前景,其很快成為世界各國家競相研究開發的熱點。
2 MAV的分類、現狀及發展趨勢
2.1 MAV的分類及特點
根據不同的飛行方式和布局,MAV主要可分為固定、旋翼和撲翼三種類型[2]。
固定翼MAV飛行速度快、飛行距離遠,適用于較大范圍的傳感探測任務,但其最小尺寸受空氣動力學原理的限制,微型化難度較大;同時固定翼MAV對最小速度和飛行姿態有較高要求,機動性較差,且無法懸停飛行。
旋翼MAV能實現懸停飛行,雖然其飛行速度較低,但適合于室內飛行,并能完成近距離靜止拍攝、監聽等任務;同時旋翼MAV受地面地形的影響較小,起飛和降落容易,另外微型旋翼MAV的微型化難度比固定翼MAV小。
撲翼MAV是目前航空領域公認的發展前景最大的一類MAV,從理論上說,其不僅可具備固定翼MAV速度快、作業半徑大的優點,而且又能像旋翼MAV一樣實現懸停飛行,甚至其機動性要遠強于旋翼MAV。
2.2 微型固定翼飛行器
MAV最初是從固定翼開始研究的,目前已取得很大進步。MIT林肯實驗室是最早研究MAV的機構。1996年7月,在美國第23屆無人機系統協調會上,該實驗室首次展示了一種鴨式布局的近距離MAV[3],翼展只有7.4cm,起飛重量僅10.5g,采用電池和電機驅動,續航時間為1h,飛行高度為100m,偵察范圍為1km。
Black Widow[4-5]是Aero Vironment公司嚴格按照DARPA技術要求研制的一種MAV。其采用固定飛翼式布局,已發展了兩代。圖 2為1999年3月試飛第一代樣機,外形酷似盤狀飛碟。前置螺旋槳由微電機和鋰電池驅動;具有空速、高度和航向保持能力;攜帶彩色攝像機,具有數據鏈路。其機翼展長15cm,可以11.2m/s的速度持續飛行33.4min。2000年8月試飛的第二代樣機,機翼平面形狀為八邊形,如圖 3所示。翼展15cm,起飛總重80g,能以速度12m/s續航30min。可裝在手提公文箱內,總重6.8kg。
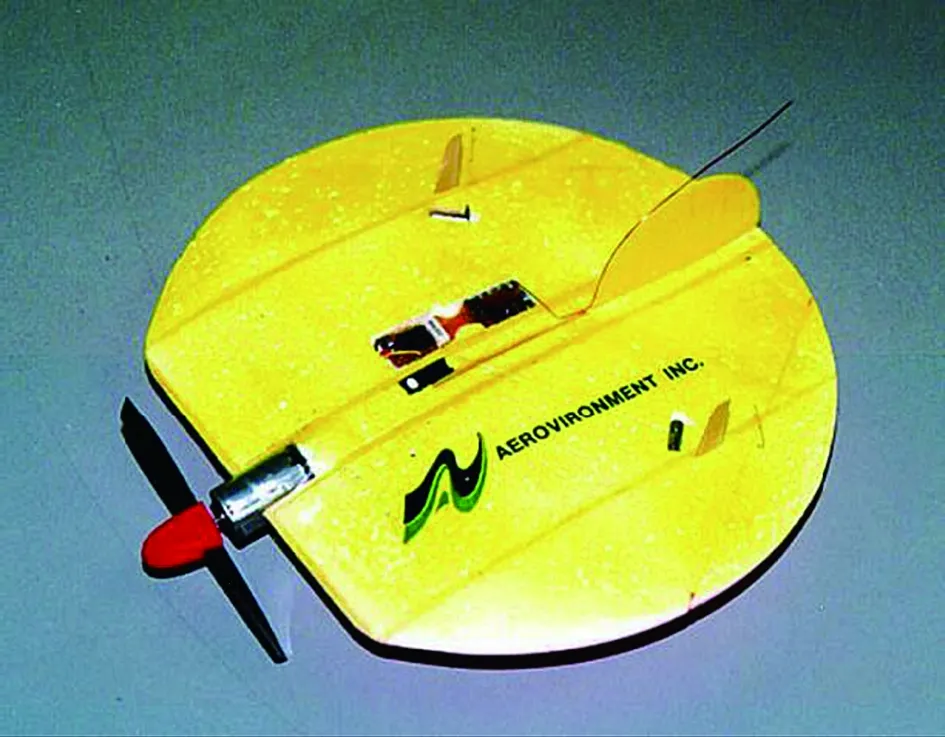
圖2 第一代Black WidowFig.2 Black WidowI

圖3 第二代Black WidowFig.3 Black Widow II
1998年4月,美國桑德斯公司、洛克希德·馬丁公司和通用電器聯合研制了“巷戰殺手”Micro Star[6](圖 4)。該MAV翼展15.24cm,總重約85g,巡航速度55km/h,續航時間大于20min,飛行高度5~91m。其微電子設備放置在機翼內,采用鋰電池供電。機上裝有重5g的差分GPS和慣性導航裝置,具有自主導航和控制能力,可直接用手擲發射,并配備微型攝像機。
美國MLB公司研制的Trochoid(圖 5)[7],由內燃機驅動,為飛行翼布局,翼展為20.32cm,飛行速度16~97km/h,能在較大風速下飛行18.5min。該微型飛行器前緣類似擺線,機翼上表面有一對呈“八”字的梯形立尾。

圖4 Micro StarFig.4 Micro Star

圖5 TrochoidFig.5 Trochoid
美國海軍研究實驗室(NRL)曾研制了一種MAV,名為MITE[8],用于實施電子干擾,其翼展約37cm,飛行速度10m/s,可續航30min。
美國弗羅里達大學研制的MAV(圖 6)[9-12],采用柔性翼設計。該MAV最大翼展為15cm,以內燃機作為動力,可在飛行速度24~40km/h范圍內續航15min,總重約52g,并攜帶攝像機和圖像發射器。
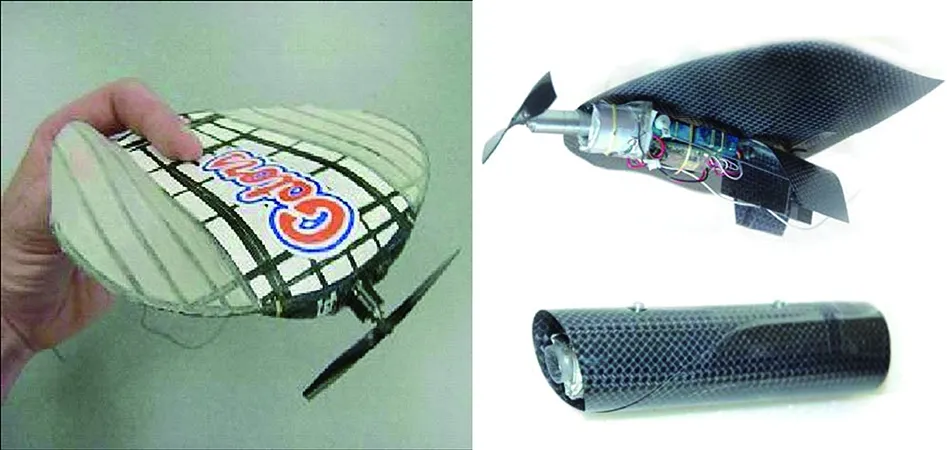
圖6 佛羅里達大學柔性翼MAVFig.6 Flex-wing MAV developed by University of Florida
南航研制的“翠鳥”號是基于MEMS微機電技術的國內首架可自主飛行控制、能實際應用的微型飛行器系統[13]。
2.3 微型旋翼飛行器
旋翼MAV主要有單旋翼帶尾槳、共軸雙旋翼、四旋翼以及涵道式等。
單旋翼帶尾槳的旋翼MAV可稱為微型無人直升機。比較有代表性的當屬日本Tomy玩具公司的微型直升機“Heli-Q”[14](圖 7)。機身全長約200mm,主旋翼直徑達160mm,每次充電20min后可以飛行5min。其發動機由直流電池供電,通過無線遙控操縱。

圖7 Heli-QFig.7 Heli-Q
2003年11月,日本的愛普生公司發布了一種共軸式雙旋翼MAV,名為μFR-II[3](圖 8),其直徑13cm,高7cm,總重8.9g,采用超聲波馬達作為動力,電池供電電壓3.5V,功率3W,通過無線藍牙控制,配備攝像頭,能實時監控目標。

圖8 μFR-IIFig.8 μFR-II
在旋翼MAV研究中,還有一些機構試圖研究尺寸更小的cm級MAV。德國的IMM公司于1997年研制了微型直升機Micro-helicopter[3],如圖 9所示,其縱軸長24mm,高8mm,重0.4g,旋翼直徑13mm。

圖9 IMM公司的串列式雙旋翼微型試驗直升機Fig.9 Test Microcopter with tandem double rotor of IMM
斯坦福大學研究小組在NASA支持下設計的微型四旋翼飛行器“Mesicopter”是一種cm尺寸大小的微型直升機[3],機身為16mm×16mm的方型框架,有四個螺旋槳,如圖 10所示,分別由直徑3mm,重325mg的微電機驅動。
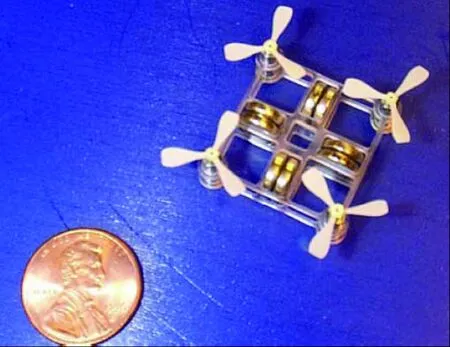
圖10 斯坦福大學的“Mesicopter”Fig.10 Mesicopter of Stanford University
在國內,上海交通大學曾研制了一種旋翼直徑14mm的雙旋翼MAV[15],該飛行器長約18.8mm,高約4.6mm,重約0.11g,動力裝置為電磁型微型電機,電機直徑僅為2mm。
2.4 微型撲翼飛行器
撲翼MAV是一種采用仿生原理設計的飛行器。Microbat(圖 11)是一款經典的撲翼MAV,由加州理工學院(Caltech)、Aero Vironment公司及加州大學(UCLA)共同研制[5]。Microbat由鋰離子高能電池提供能源,通過微電機驅動機翼的撲動。經過4代樣機的發展,該MAV總重量僅為11.5g,尺寸僅為20.32cm,可攜帶微型攝像機或聲音傳感器。2002年8月,該飛行器通過無線遙控方式飛行了22min45s。
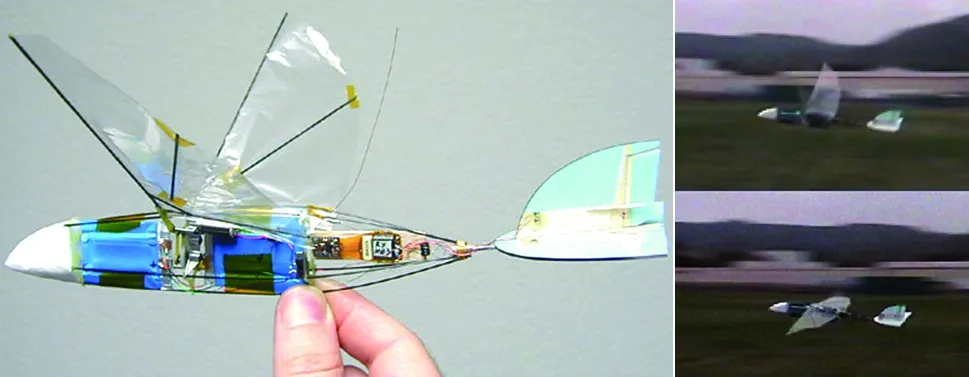
圖11 MicrobatFig.11 Microbat
美國加州大學伯克利分校(UC Berkeley)曾研制了一型MAV,稱為微機械飛行昆蟲MFI(Micromechanical Flying Insect)(圖 12)[16],MFI的翅膀采用超薄聚酯制造,能像蒼蠅一樣撲翼和飛行,該MAV尺寸僅25mm,重量約為100mg。
英國劍橋大學、美國佐治亞理工大學(GTRI)與ETS實驗室曾共同研制過計劃用于火星探測飛行的Entomopter(圖 13)[17]。該飛行器翼展為25.4cm,由4片機翼組成,通過一種往復式化學肌肉(Reciprocating Chemical Muscle,RCM)驅動。

圖12 MFIFig.12 MFI
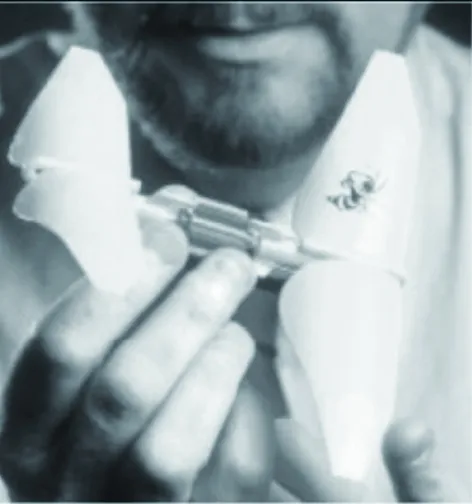
圖13 EntomopterFig.13 Entomopter
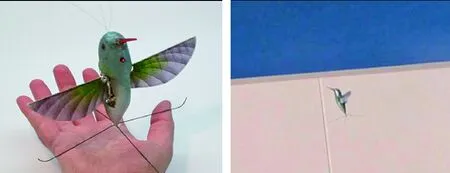
圖14 HummingbirdFig.14 Hummingbird
Aero Vironment公司在DARPA的支持下經過10余輪樣機的試制,于2011年初成功研制出Nano Hummingbird微型飛行器(圖 14)[18],該飛行器最大的特點是采用無尾翼設計,僅通過推進撲翼實現了懸停過程中的滾轉、偏航和俯仰姿態控制,成功證明了無尾翼懸停飛行的可行性。Nano Hummingbird攜帶視頻采集系統,重約19g,翼展約16.5cm,可懸停11min,前飛速度6.7m/s,續航時間約4min。
美國哈佛大學微機器人試驗室在國家科學基金的支持下,采用MEMS技術于2011年成功研制了重量僅為125mg的微型機器蜜蜂(RoboBee)[19-21],如圖 15,該MAV采用壓電裝置驅動,但尚不具備完全自主飛行的能力。
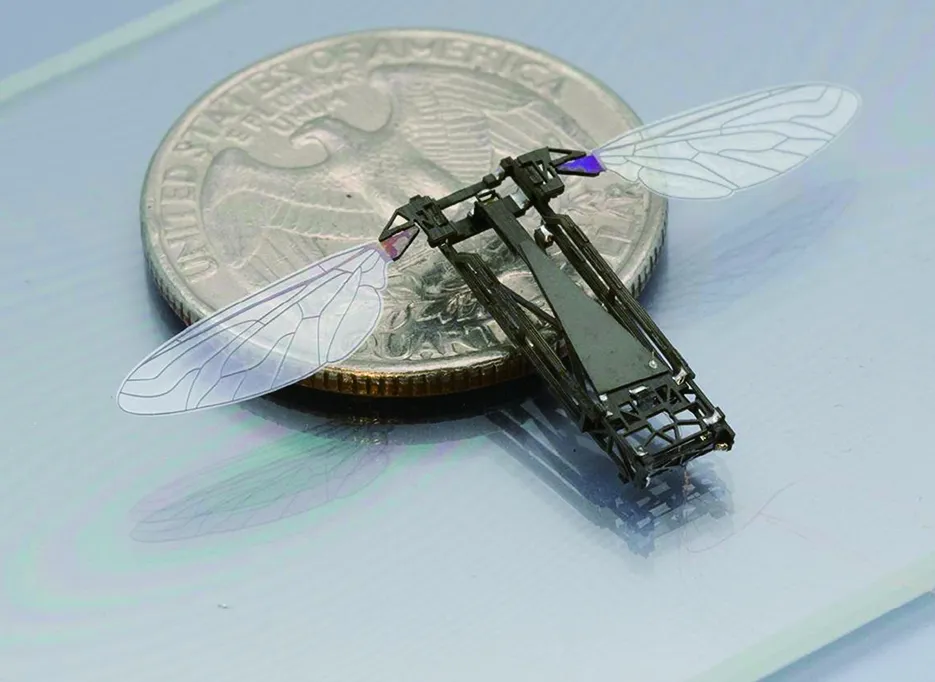
圖15 RoboBeeFig.15 RoboBee
國內上海交通大學曾研究了翼展50mm~60mm的基于電磁和基于壓電驅動的撲翼MAV方案[2,22]。南京航空航天大學曾制作了幾種仿鳥撲翼飛行器[17,23],并于2002年首次試飛成功,其技術水平已與Microbat接近。
2.5 MAV的發展趨勢
實用化是MAV發展的最終目標。目前,由于能源與動力裝置、飛行控制、通信、導航設備與傳感器等問題尚未得到很好解決,MAV離完全實用化還有一定的距離。
智能化是MAV發展的必然趨勢。目前MAV尚無法達到全智能化的程度,還不具備自主飛行的能力,飛控技術和微型高精度導航系統仍有待發展,一方面研究新型控制方法,另一方面需提高設備精度、處理速度和微型化程度。隨著這些技術問題的解決,各種具備自主飛行能力的MAV必將面世,再通過與各類傳感器的一體化融合設計,其將在軍民領域發揮重要的作用。
仿生是未來MAV的發展方向。由于固定翼在低Re數下遇到了低升阻比和不穩定的問題,人們將眼光聚焦于自然界當中,與MAV的Re數較為相當的鳥類和昆蟲,這些生物的飛行方式是解決低Re數飛行問題的有效手段。同時,近幾年,隨著MEMS技術、智能材料等基礎學科的發展,使得仿生撲翼MAV的研制成為可能。
同時,MAV的飛行控制是決定MAV能否真正走向應用的關鍵性問題,但其復雜性和重要性,決定了它將是MAV研究的長期熱點。
3 MAV的系統構架
MAV主要由能源動力系統、通信系統、機體結構、控制系統、傳感系統等功能模塊組成,如圖 16所示。

圖16 MAV系統構架Fig.16 Architecture of MAV system
在MAV系統中各部分有其獨特的作用,能源動力系統提供MAV動力以及各設備所需的能源。機體結構提供飛行器氣動外型,并保證結構強度,使其穩定可靠的飛行。通信系統為MAV與主控平臺之間建立聯系,使其能夠成功的執行命令,同時使操縱人員時刻掌握MAV的飛行信息。控制系統根據MAV獲取傳感信息,進行快速準確的處理并作出反應,對MAV的飛行姿態、速度、航線進行控制和定位。傳感系統分析和采集來自外界的信息,通過采用各種傳感器來實現MAV對外界環境信息的感知和探測。
4 MAV研制涉及的關鍵技術
MAV是一種新技術高度集成的飛行器,在MAV的研究中主要涉及以下關鍵性技術。
4.1 低雷諾數空氣動力學
MAV與常規飛行器的空氣動力學有很大的不同,常規飛行器的飛行Re約在106~108,其氣動外形設計己趨于成熟。根據目前MAV特征尺寸15~25cm和飛行速度8~15m/s,其Re數約在104~105附近,邊界層以層流為主且易出現分離現象,從而導致氣動效率明顯下降,且氣動力的穩定性控制難度較大。
固定翼MAV,機翼邊界層流態對氣動姿態的非常敏感,微小的變化很可能導致邊界層分離,造成升阻比大幅度下降;旋翼MAV,隨飛行Re數的減小,其槳翼的氣動效率也將降低;撲翼MAV的空氣動力學發展最不成熟,飛行機理及其與結構參數的關系尚無公認規律,需深入探索。
從目前的研究方向和成果看,獲得高升阻比的手段主要包括擾流片、微噴流控制、動壁效應等。但對于特征尺寸小于15cm的MAV,采用仿生力學的手段,將是更好的方式。
4.2 微型能源動力技術
微型能源動力裝置是MAV的關鍵設備,也是目前最大的制約因素之一。
電池/電動機組是MAV最常用的一類動力裝置,其體積可以做的很小,但能量密度較低,能量釋放率也有待提高。
內燃式發動機是一種采用燃料的動力裝置,其能量密度比電池高,但內燃式發動機的效率比較低,微型內燃機的熱效率僅5%,功率密度最大僅1W/g,而且噪音大及可靠性差也是內燃式發動機需要解決的問題。
微型渦輪發動機是另一種有潛力的動力裝置,主要有燃料發動機、噴氣發動機等,但這類微型發動機在技術上還不夠成熟。
4.3 機載設備MEMS技術
MAV機體內空間十分有限,可以攜帶的機載設備裝置和有效載荷受到極大的限制。導航、飛控及傳感探測系統是MAV中必不可少的重要設備。
導航控制系統中的高度計、陀螺、加速度計;飛控系統中的空速計、舵機;傳感探測系統中的攝像機、聲傳感器、紅外傳感器、生化探測器等都需利用MEMS技術實現微型化設計,以更小的尺寸和重量來適應MAV。MEMS技術的發展將為MAV飛行控制、導航和傳感系統的微型化和集成化提供基礎。
4.4MAV飛行控制技術
MAV的飛控系統是MAV實現自主導航與控制的必要前提,其既要保證MAV的姿態穩定,使其有足夠的升阻比維持巡航飛行,又能使其順利完成各種飛行動作;此外MAV在飛行過程中易受湍流和陣風的干擾,因此飛控系統需具備良好的抗干擾能力和魯棒性。
常規飛行器通過操縱各類舵面的偏轉,利用氣動力可以實現俯仰、偏航、滾轉等姿態變化,而MAV的舵面尺寸小使得其氣動效率很低,難以僅利用舵面偏轉維持或改變飛行器的飛行狀態。解決該問題的途徑之一是發展新型控制方式,比如通過采用微噴流環量控制技術、利用仿生撲翼和柔性可變翼型等。
4.5MAV數據通訊技術
MAV在飛行過程中需要與地面基站進行圖像視頻、傳感信息、控制命令等數據的實時傳輸,受體積和重量的限制,目前MAV主要采用微波通訊,但它傳輸距離有限且無法穿透墻壁。
作為MAV數據容量最大的通訊數據,圖像視頻信號傳輸所需的能源一般占MAV總能源的1/5,通過調節圖像幀速率、采用可轉向天線等方法可以減小數據傳輸消耗的能源,通過圖像壓縮、采用天線增益等方法,可以減小數據傳輸容量,加快傳輸速度、增大傳輸距離。
4.6MDO設計技術
MAV是一個多種功能子系統高度集成的復雜系統。針對多學科交叉的高度集成設計難題,傳統的按單個學科或系統的研究及設計方法已不能適應,采用多學科設計優化——MDO(MultidisciplinaryDesignandOptimization)方法是研究MAV的有效途徑,MDO方法能較好地統籌MAV的氣動布局、能源、重量、控制、通信、導航、傳感探測等各方面的要求。對MAV進行一體化的分析與設計。
5 發展建議
微型飛行器(MAV)作為高度集成的空中微智能傳感探測系統是智能傳感未來重要的發展方向,其在軍事和民用領域都具有廣闊的應用前景。
一方面,國外在MAV方面的研究開展較早且已具備一定的工程化水平,而國內的研究則啟動較晚,發展較為緩慢,相關成果主要來源于高校的原理性基礎研究工作,工程應用基本空白。因此,為加快國內MAV技術研究步伐,推動MAV工程化研制進程,建議專業從事軍工產品研發和生產的科研院所應充分利用自身豐富的工程研制經驗、先進的研發試驗能力、成熟的科研管理體系等優良條件,同時大力牽引國內專業院校,發揮其理論優勢,采用一體化設計理念,綜合氣動、控制、導航、傳感測量、MEMS等專業技術,系統開展基礎研究、關鍵技術攻關和工程產品研制。
另一方面,通過分析MAV的特點分類、發展現狀及關鍵技術可以發現,旋翼MAV和撲翼MAV在微型化方面的潛力及可行性最為明顯,可作為后續研究的主要技術方向,其中,撲翼MAV由于在空氣動力學領域的研究仍存在較大瓶頸,機理還不清晰,缺乏相應的理論指導,研制難度較大,而旋翼MAV飛行機理與直升機較類似,控制理論較為成熟,工程可實現性較強,因此旋翼MAV可作為工程化研制的首選技術途徑。同時,依托MEMS技術的發展,應加強MAV能源、導航、控制、傳感、通訊等核心設備微型化、集成化的技術攻關和產品研發。
[1]DeathByAThousandCuts:Micro-AirVehicles(MAV)InTheServiceOfAirForceMissions[R].AU/AWC/2001-4,2001.
[2] 左德參.仿生MAV若干關鍵問題的研究[D]. 博士學位論文,上海交通大學,2007.
[3] 陳國棟,賈培發,劉 艷.MAV的研究與發展[J]. 機器人技術與應用,2006(02).
[4]GrasmeyerJM,KeennonMT.DevelopmentoftheBlackWidowMicroAirVehicle[R].AIAA-2001-0127.
[5]KeennonMT,GrasmeyerJM.DevelopmentoftheBlackWidowandMicrobatMAVsandaVisionoftheFutureofMAVDesign[R].AIAA-2003-2901.
[6]MicroSTARmicroairvehicledesigntoreality.BAESystems,2000.http://euler.aero,iitb,ac,in/docs/MAV/www.baesystems.com/microstar.pdf.
[7]MorrisSJ,HoldenM.Designofmicroairvehiclesandflighttestvalidation[C]//.ProceedingsoftheConference:Fixed,NappingandRotaryWingVehiclesatVeryLowReynoldsNumbers.UniversityofNotreDame,2000: 53-176.
[8]JamesKellogg,ChristopherBovais.TheNRLMiteAirVehicle[R].2001.ADA478713.
[9]YongshengLian,WeiShyy.Membranewingaerodynamicsformicroairvehicles[J].ProgressinAerospaceSciences39 (2003) 425-465.
[10]RobertoAlbertani,BretStanford.CharacterizationofFlexibleWingMAVs:eroelasticandPropulsionEffectsonFlyingQualities[R].AIAA-2005-6324.
[11]PeterG.Ifju,BretStanford,MikeSytsma.AnalysisofAFlexibleWingMicroAirVehicle[R],AIAA-2006-3311.
[12]BaronJohnson,DanielClaxton,BretStanford,VijayJagdale,PeterIfju.DevelopmentofaCompositeBendable-WingMicroAirVehicle[R].AIAA-2007-1044.
[13] 昂海松.MAV的概念與技術特點分析[C]//.江蘇省航空航天學會飛行器專業委員會2007年學術年會,承德,1-Aug,2007.
[14] 陳彥博. 某新型微型旋翼飛行器的飛行控制系統設計[D]. 碩士學位論文,南京航空航天大學,2009.
[15] 肖永利,張琛. 基于2mm微馬達的微型直升機設計與研制[J]. 高技術通訊,2001,82-84.
[16]SteltzE,WoodRJ,AvadhanulaS,FearingRS.CharactrtizationoftheMicromechanicalFlyingInsectbyOpticalPositionSensing[C]//.IEEERoboticsandAutomation,2005,1252-1257.
[17] 朱保利. 多自由度撲翼MAV設計研究[D]. 博士學位論文,南京航空航天大學,2007.
[18]MatthewKeennon,KarlKlingebiel,HenryWon.DevelopmentoftheNanoHummingbird:ATaillessFlappingWingMicroAirVehicle[R].AIAA-2012-0588.
[19]RobertJWood,BenjaminFinio,MichaelKarpelson.Challengesformicro-scaleflapping-wingmicroairvehicles[C]//.Micro-andNanotechnologySensors,Systems,andApplicationsIV,SPIE-2012-83731: 83731J.
[20]MichaelKarpelson,Gu-YeonWei,RobertJWood.Drivinghighvoltagepiezoelectricactuatorsinmicroroboticapplications[J].SensorsandActuators,2012,176(A):78-89.
[21]Pierre-EmileJDuhamel,N′estorO.P′erez-Arancibia.GeoffreyL.Barrows,andRobertJ.Wood.BiologicallyInspiredOptical-FlowSensingforAltitudeControlofFlapping-WingMicrorobots[J].IEEE/ASMETransactionsonEchatronics,2013,18(2):556-568.
[22] 蔡弘. 基于仿生學原理的微型特種機器人的研究[D]. 碩士學位論文,上海交通大學,2002.
[23] 曾銳. 仿鳥微型撲翼飛行器的氣動特性研究[D]. 博士學位論文,南京航空航天大學,2004.
The Study on Aero Micro Intelligent Sensing and Detection System
BO Nan
(Beijing Institute of Automation Control Equipment,Beijing 100074,China)
The Micro air vehicle (MAV) as a kind of aero micro intelligent sensing and detection system is an important development direction of intelligent sensing technique. The development tendency of MAV is summarized with the investigation of feature,application,categories and evolution. Based on the system constitution of MAV,the key techniques are analyzed. Finally,the research proposal of MAV in the future is offered.
Intelligent Sensing;Micro Air Vehicle;MAV
2015 - 03 - 12;
2015 - 03 - 24。
柏楠(1982-),男,高級工程師,主要從事傳感測量,空氣動力學,導航與控制等方面的研究。
E-mail:andynan_bo@sina.com
TE27
A
2095-8110(2015)03-0034-09
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
